Изобретение относится к безопасным рукояткам для грузоподъемных механизмов с ручным приводом.
Пзвестные рукоятки такого типа обычно имеют раздельно выполненные приводной рычаг и рабочий вал. Приведение вала во вращение рычагом осуществляется через тормозное устройство, содержащее храповик, втулку с фланцем и трапецеидальной резьбой, жестко связанную с рабочим валом, и вторую, внешнюю втулку, навинченную на первую и несущую приводной рычаг.
У таких рукояток одно направление вращения используется для подъема груза, а обратное - для его опускания. Тормозное устройство предотвращает произвольное вращение рукоятки под действием веса поднимаемого груза.
Целью настоящего изобретения является усовершенствовать безопасную рукоятку выщеописанного типа так, чтобы любое направление ее вращения могло быть использовано для подъема механизмом груза. Эти бывает нужным в тех случаях, когда имеется один механизм, требующий для попеременного подъема грузов то с одним направлением вращения рукоятки, то с другим, например, в парниках, где рамы попеременно поднимают то с южной, то с северной стороны. Для достижения этой цели в рукоятке согласно изобретению фланец внещней втулки заключен в пазу между колесом храповика и его крыщкой, а на наружную поверхность этой втулки свободно надет колпак, жестко .шпый с рабочим валом и имеющий фланец, упирающийся в крыщку упомянутого храпового колеса. Колесо выполнено с зубьями двустороннего действия, взаимодействующими с двуплечей собачкой, снабженной перекидным грузиком .
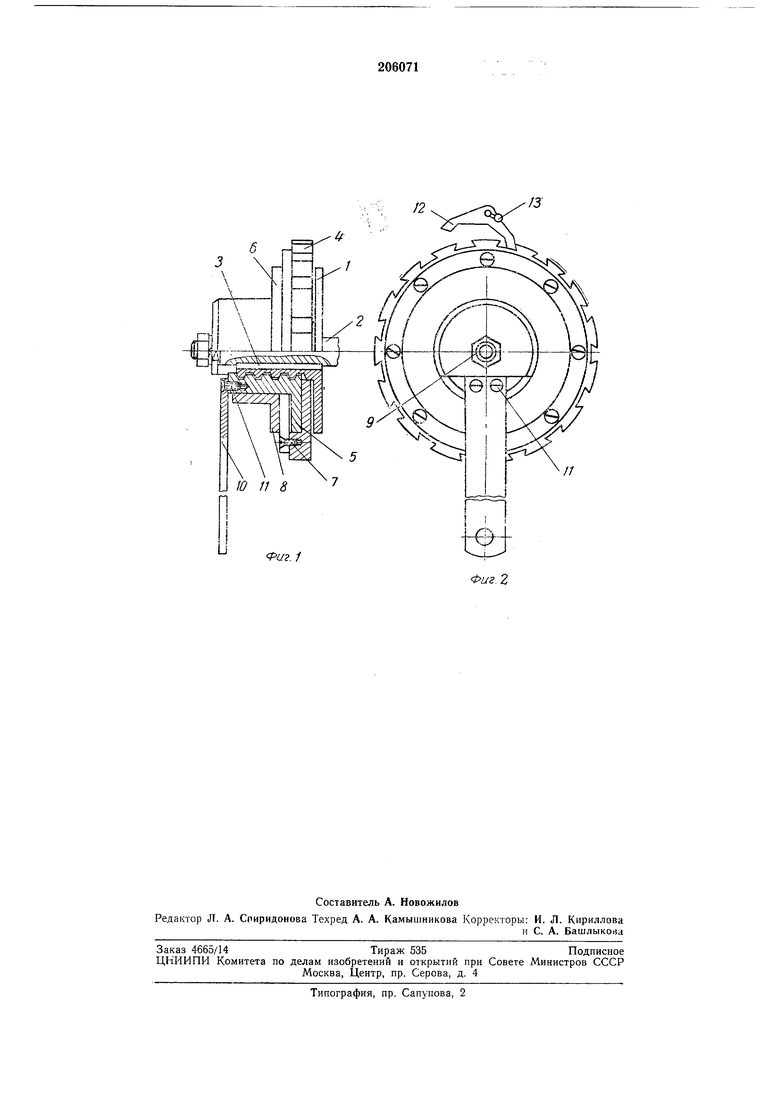
На фиг. 1 изображена рукоятка, вид сбоку; на фиг. 2 - вид с торца.
Внутренняя втулка 1 с фланцем и трапецеидальной резьбой закреплена и;; |)абочсм залике 2 при помощи щпонки 3.
На посадочное место внутренней втулки свободно надето храповое колесо 4 с зубьями двустороннего действия, на резьбовую часть втулки навинчена внещняя втулка 5 с фланцем.
На наружную поверхность внещней втулки свободно надета крыщка 6 храпового колеса, закрепленная винтами 7.
Фланец внещней втулки таким образом находится в полости между внутренней стенкой храпового колеса и стенкой крыщки с небольщим зазором.
Приводной рычаг 10 рукоятки прикреплен к внешней втулке двумя винтами //.
Для свободното доступа к винтам колпак имеет специальный вырез, хорошо видный на фит. 2.
Безопасная рукоятка имеет собачку 12 в виде двуплечего рычага и перекидной грузик 13. Подъем груза осуществляется следуюш;им образом.
1-й случай - враш;ение рукоятки по часовой стрелке.
В начале процесса подъема, как только груз отделится от своего места, на внешней втулке 5 возникнет момент, который переместит ее по резьбе в направлении храпового колеса 4 и прижмет храповое колесо к фланцу внутренней втулки /, после чего эта система за счет трения будет вращаться как одно целое. Положение собачки 12 должно быть выбрано таким, чтобы храповой механизм не препятствовал процессу подъема.
По окончании подъема и освобождении приводного рычага груз, представленный самому себе, будет воздействовать на вал, поворачивая его в обратную сторону, но собачка сейчас же упрется в храповое колесо и остановит его, а следовательно, и связанную с ним силой трения внешнюю втзлку с рычагом, в связи с чем опускание груза не произойдет.
Для опускания же груза надо сообщить внешней втулке 5 принудительное вращение против часовой стрелки.
При вращении внешней втулки 5 относительно неподвижной в начале опускания внутренней втулки 1 внешняя втулка отойдет от храпового колеса 4, нажатие исчезнет, тормоз, образованный деталями рукоятки, разомкнется и груз начнет опускаться под действием собственного веса.
2-й случай - вращение рукоятки против часовой стрелки.
Для этого нужно перекинуть грузик на другое плечо собачки и как только груз начнет подниматься, на внешней втулке 5 возникнет момент, который, как и в первом случае, будет перемещать ее по резьбе, но только в противоположную сторону (на фиг. 1 влево) к крышке храпового колеса, и прижимает ее к фланцу колпака 8, который неподвижно сидит на квадратном конце рабочего вала. После этого сжатая система элементов будет вращаться как одно целое.
Для опускания груза так же, как в первом случае, надо сообщить втулке 5 принудительное вращение, но только по часовой стрелке.
При вращении внешней втулки относительно неподвижного в начале опускания колпака 8 внешняя втулка с рычагом отойдет от крышки храпового колеса, нажатие исчезнет и тормоз разомкнется, вследствие чего груз начнет опускаться под действием собственного веса. Однако, подчиняясь закону свободного падения, груз будет опускаться не равномерно, а ускоренно, приводя в такое же ускоренное движение внутреннюю втулку. Вследствие этого, через короткий промежуток времени внутренняя втулка 1 начнет обгонять внешнюю втулку 5 и, перемещаясь по резьбе, дойдет до храпового колеса или крышки храпового колеса и зажмет их, при этом тормоз замкнется и остановит груз.
Вращая рукоятку, можно снова разомкнуть тормоз и груз снова получает возможность свободно опускаться, что завершится, как и в первом цикле, автоматическим замыканием тормоза.
Таким образом, процесс опускания груза состоит из ряда чередующихся свободных падений и остановок.
При правильно отрегулированных зазорах в безопасной рукоятке это чередование практически почти не ощущается.
Предмет изобретения
Безопасная рукоятка для грузоподъемных механизмов с ручным приводом, приводной рычаг и рабочий вал которой вьшолнен раздельно и соединены между собой тормозным устройством, содержащим храповик, втулку с фланцем и трапецеидальной резьбой, жестко связанную с рабочим валом, и вторую, внешнюю втулку, навинченную на первую и несущую приводной рычаг, отличающаяся тем, что, с целью обеспечения подъема груза механизмодм при любом направлении вращения приводного рычага, фланец внешней втулки заключен в пазу между колесом храповика и его крыщкой, а на наружную поверхность этой втулки свободно надет колпак, жестко соединенный с рабочим валом и имеющий фланец, упирающийся в крышку упомянутого храпового колеса, выполненного с зубьями двустороннего действия, взаимодействующими с двуплечей собачкой с перекидным грузиком.
б н
LJ
fLf. 1
12
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНАЯ ЛЕБЕДКА | 1967 |
|
SU205250A1 |
| Грузопассажирский строительный подъемник | 1976 |
|
SU618337A1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПРИЛОЖЕННОГО СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО РУЧНОГО ТОРМОЗА | 2012 |
|
RU2582594C2 |
| РУЧНАЯ ТАЛЬ | 1992 |
|
RU2026262C1 |
| Механизм подъема электрической тали | 1991 |
|
SU1828448A3 |
| Ручная лебедка | 1980 |
|
SU919979A1 |
| Безопасная рукоятка | 1978 |
|
SU685617A1 |
| Лебедка | 1989 |
|
SU1744051A1 |
| Безопасная рукоятка для лебедки | 1960 |
|
SU131481A1 |
| Безопасная рукоятка | 1984 |
|
SU1208000A1 |