Изобретение относится к .механизмам и устройствам для транспортировки и перегрузки штучных грузов с конвейера на конвейер и может найти применение во всех отраслях промышленности, где производится перемеиление штучных грузов.
Цель изобретения - повып1ение надежности передачи штучных грузов на приемный конвейер при пересечении трасс после- дуюн1,его и передающего механизма.
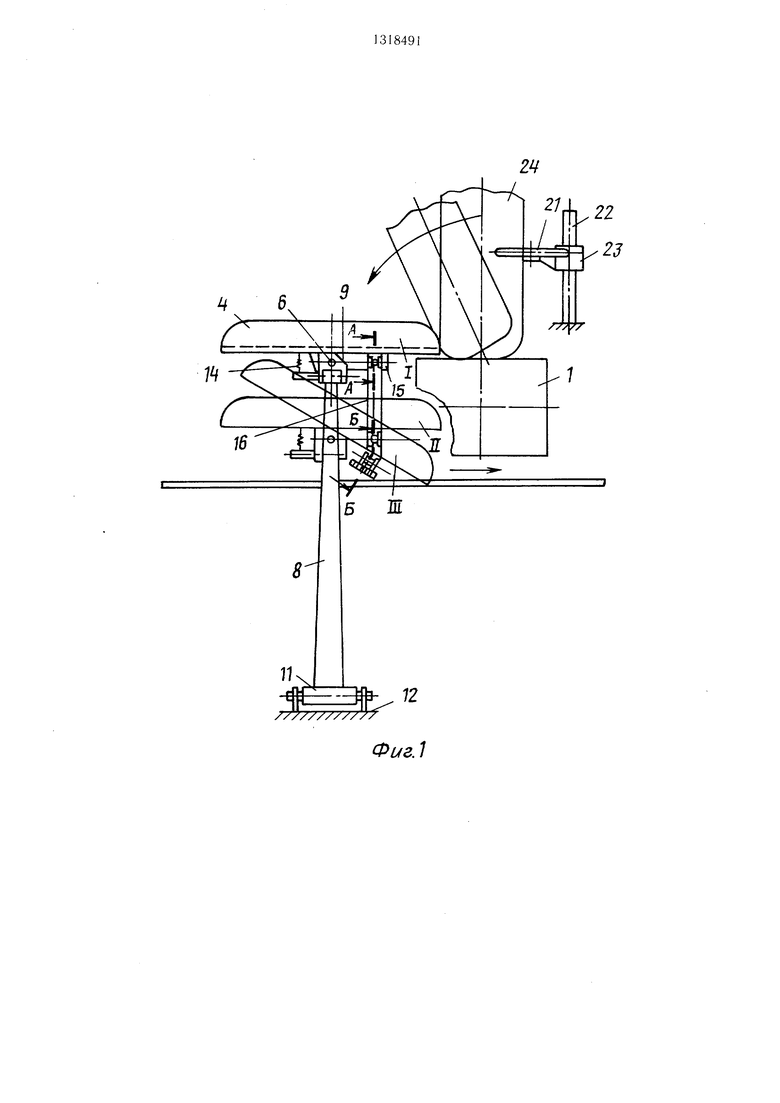
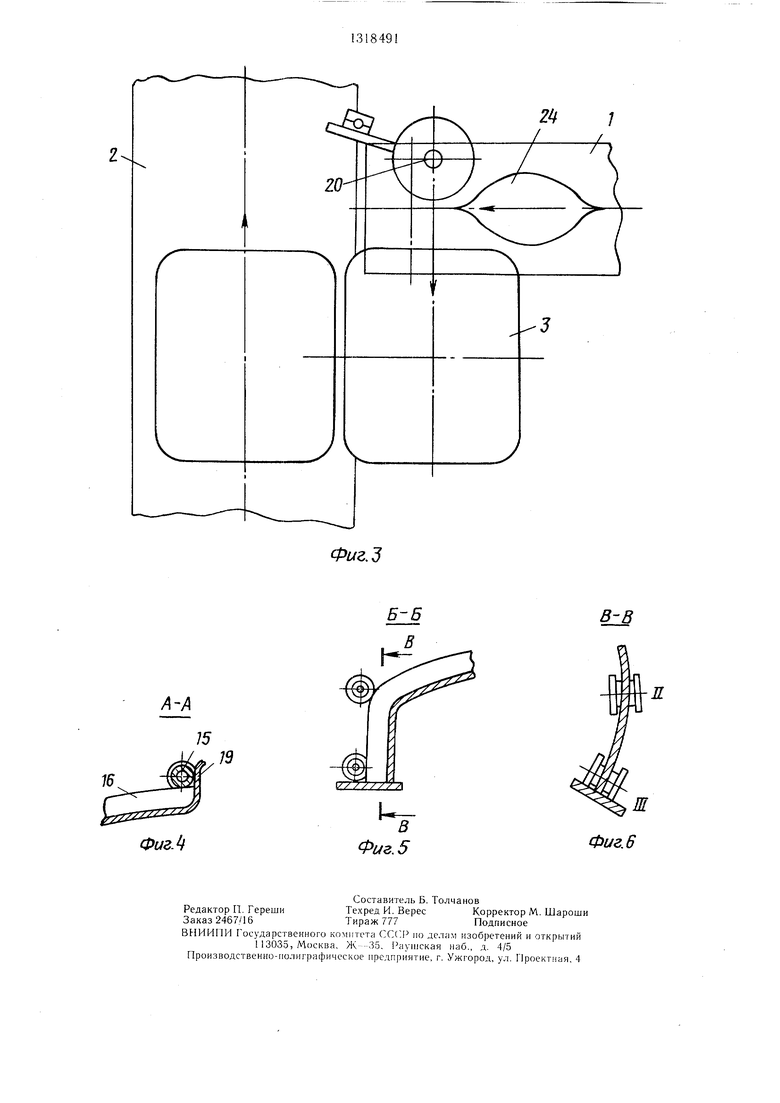
На фиг. 1 показано предлагаемое устройство, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - разрез А-А на фиг. 1; на фиг. 5 -- разрез Б-Б на фиг. 1; на фиг. 6 - разрез В-В на фиг. 5.
Устройство содержит подающий 1 и приемный 2 конвейеры, расположенные под углом 90° друг к другу, и передающий механизм 3. Передающий механизм включает вогнутую платформу 4, взаимосвязанную посредством шарниров 5 и 6 с двумя дугообразными параллельными между собой рычагами 7 и 8. На корпусе н арниров 5 и 6 выполнены скосы 9 (фиг. 2). Рычаги 7 и 8 входят в состав четырехзвенника, третьим плечом которого является платформа 4, посредством П1арниров 10 и 11 установлены на основании 12, являюнхемся замыкающи.м звеном четырехзвенника, и подпружинены пружинами 13, действующая сила которых регулируется. При этом дугообразные рычаги 7 и 8 размещены вдоль продольной оси подающего конвейера 2 и изгибом направлены в сторону, противоположную приемному конвейеру 2. Платформа 4 взаимосвязана с рычагами 7 и 8 консольно и подгфужине- на пружинами 14 (фиг. 1).
Механизм наклона консольной платформы 4 выполнен в виде установленного на нижней ее поверхности ролика 15 и взаимодействующего с ним копира 16, размещенного под консольной платформой 4. Контур копира 16 имеет дугообразный 17 и вертикальный участки 18, а на концах копира установлены ограничители 19.
Возле нодаюн1его конвейера I установлен сталкиватель 20 для грузов, например мешков, выполненный в виде диска 21, уста- новлеьпюго поворотно на оси 22 кронигтей- на 23 с возможностью регулирования его но- ложения в вертикальной и горизонтальной плоскостях. Штучным грузом является мепюк 24.
Устройство работает следующим образом.
При отсутствии мен1ка 24 на платформе 4 система четырехзвенника (позиции 4, 7, 8 и
0
12) находится в уравновещенном состоянии, при котором платформа 4 находится в исходном положении I и опирается через шарниры 5 и 6 на рычаги 7 и 8 и роликом 15 с копир 16.
Мешок 24, движущийся по подающему конвейеру 1, диском 21 сталкивателя 20 опрокидывается на платформу 4. Под действием массы мещка в системе четырехзвенника возникает момент, перемещающий платформу 4 с мещком по копиру 16. До конца дугообразного участка 17 платформа 4 имеет три точки опоры и, следовательно, сохраняет горизонтальное положение II. В конце дугообразного участка 17 рычаги 7 и 8
5 запираются, укладываясь один над другим, что соответствует положению III платформы 4 над приемным конвейером 2. При этом ролик 15, катящийся по копиру 16, перемещается по его вертикальному участку 18, обеспечивая этим наклон платформы 4 в
0 сторону, направленную по ходу движения приемного конвейера 2, до упора платформой в скосы 9 шарниров 5 и 6 (положение III) MenjOK подхватывается движущейся лентой приемного конвейера 2.
5 Платформа- 4, освободившись от мешка, под действием пружин 14 возвращается в горизонтальное положение И, при котором ролик 15 поднимается до начала дугообразного участка и под действие.м пружин 13 возвращается в исходное положение I.Ролик
Q 15 при этом упирается в ограничитель 19.
Формула изобретения
Устройство для перегрузки штучных грузов с подающего конвейера на приемный,
5 расположенный под углом 90° к первому, включающее расположенный .между конвейерами четырехзвенный передающий механизм в виде параллельных рычагов с щар- нирно установленной на них вогнутой консольной платформой и механизм наклона
0 гтлатформы в сторону приемного конвейера, отличающееся тем, что, с целью повышения надежности передачи штучных грузов на приемный конвейер при пересечении трасс последнего и передающего механиз.ма, рыс- чаги подпружинены и выполнены дугообразными с изгибом, направленным в сторону противоположную приемному конвейеру, а механизм наклона платформы выполнен в виде раз.мещенного под последней копира и взаимодействующего с ним ролика, установленного на консольной стороне платформы.
Фиг.1
Фиг.д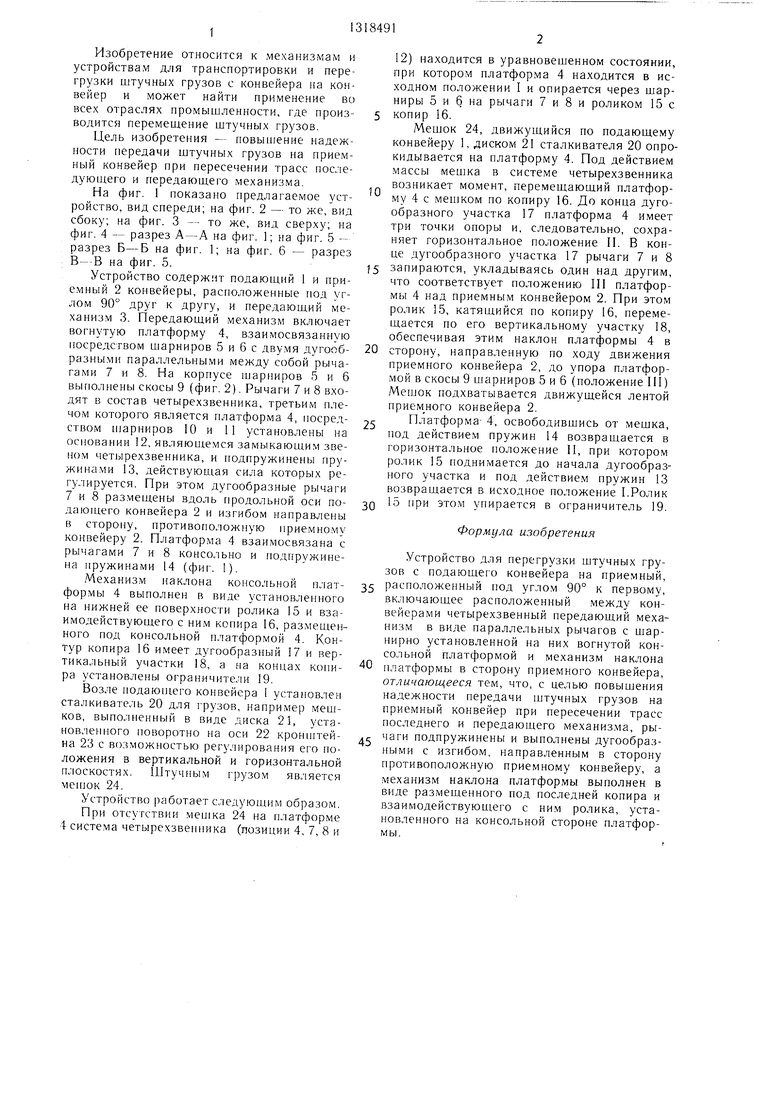
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разборки пакетов штучных грузов | 1975 |
|
SU590221A1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Машина для погрузки штучных грузов в вагоны | 1983 |
|
SU1189769A1 |
| Машина для укладки в пакет с перевязкой штучных грузов | 1959 |
|
SU130399A1 |
| Устройство для сталкивания штучных грузов с конвейера | 1981 |
|
SU988711A1 |
| Устройство для погрузки штучных грузов на подвесной конвейер | 1990 |
|
SU1751114A1 |
| Распределительный тележечный конвейер | 1977 |
|
SU663645A1 |
| УСТРОЙСТВО для ФОРМИРОВАНИЯ ПАКЕТОВ ЗАТАРЕННЫХ | 1966 |
|
SU180133A1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| Конвейер для транспортирования штучных грузов | 1990 |
|
SU1795951A3 |
Изобретение относится к механизмам для транспортировки и перегрузки штучных грузов с конвейера (К) на К и позволяет повысить надежность передачи штучных грузов на приемный К 2 при пересечении трассы К 2 и передаюш.его механизма. Между подаюш,им К 1 и К 2 расположен четырехзвенный передаюш.ий механизм в виде дугообразных параллельных подпружиненных рычагов (Р) 7 и 8 с шарнирно установленной на них вогнутой консольной платформой (П) 4. Изгиб Р 7 и 8 направлен в сторону, противоположную К 2. Механизм наклона П 4 в сторону К 2 выполнен в виде раз- меш.енного под П 4 копира и взаимодейст- вуюш.его с ним ролика, установленного на консольной стороне П 4. В исходном положении (1) П 4 опирается через шарниры 5 и6наР7и8и роликом - на копир. Мешок 24, движушийся по К 1, опрокидывается на П 4. Под действием его массы в системе четырехзвенника возникает момент, пе- ремещаюший П 4 с мешком по копиру. До конца дугообразного участка 17 копира П 4 сохраняет горизонтальное положение (И) В конце участка 17 Р 7 и 8 запираются, укладываясь один над другим, а ролик перемешается по вертикальному участку 18 копира, обеспечивая этим наклон П 4 в сторону К 2 (положение И1). Мешок подхватывается лентой К 2. 6 ил. S (О со 00 со 77
16
у / / / / / / /
ФигЛ
Б-Б
Ш
в
Фиг. 5
Фиг. 6
Редактор П. Герешн Заказ 2467/16
Составитель Б, Толчанов
Техред И. ВересКорректор М. Шароши
Тираж 777Подписное
ВНИИПИ Государственного комитета ( CCI- по делам изобретений и открытий
113035, A locKBa. Ж 35. Раун1ская наб., д. 4/5 Производственно-по.чиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для перегрузки штучных грузов | 1977 |
|
SU644690A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматической передачи изделий круглой формы с отверстием | 1976 |
|
SU656936A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
