11
Изобретение относится к сельскохозяйственному машиностроению, а именно к системам автоматического регулирования глубины хода рабочих ор .ганов машин и орудий.
Цель изобретения - повышение стабильности глубины хода рабочих органов и улучшение эксплуатационных характеристик машинно-тракто рного агрегата.
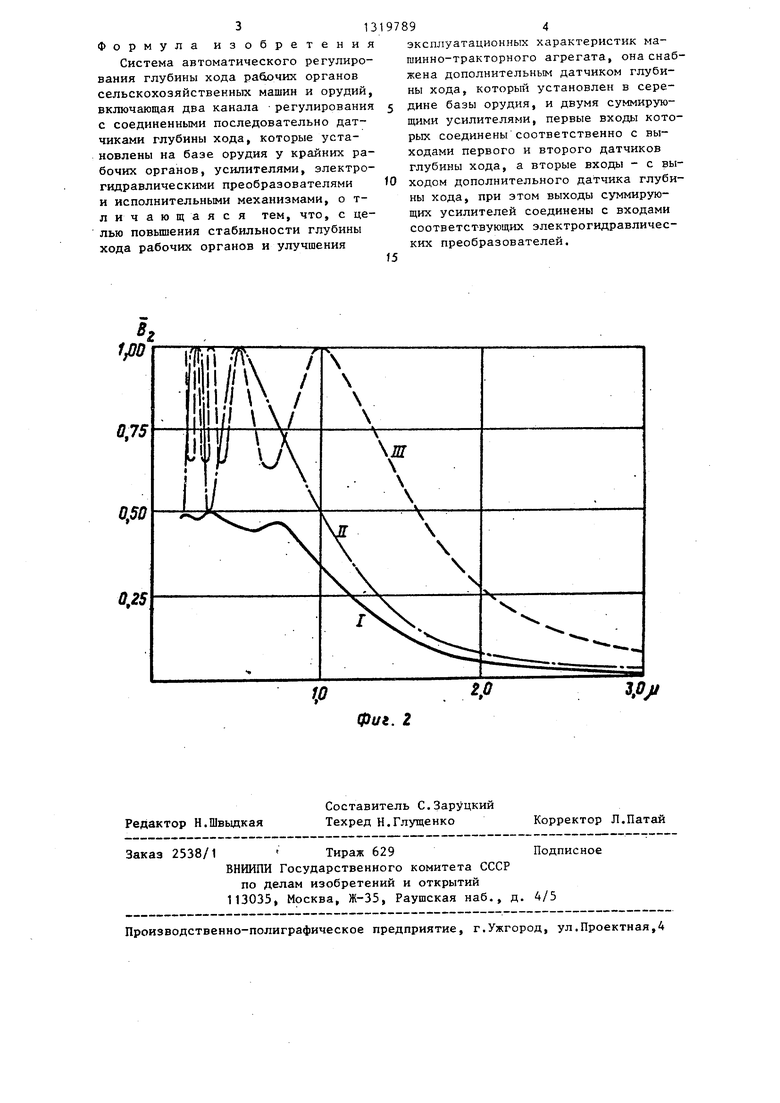
На приведенд функциональная схема системы автоматического регулирования глубины хода рабочих органов; на фиг.2 - теоретические зависимости квадратичной ошибки копирования микрорельефа поля.
Система автоматического регулирования глубины хода рабочих органов состоит из датчиков 1 и 2 глубины хода крайних рабочих органов орудия. и датчика 3, установленного в сере- дине базы орудия, сум1.1ирующшс электронных усилителей 4 и 5, трехпози- ционных электронных усилителей 6 и 7, электрогидравлических преобразователей 8 и 9, исполнительных механизмов 10 и 11.
Датчики 1,2 и 3 глубины хода рабочих органов устанавливаются на раме орудия таким образом, чтобы при заданной глубине хода контролируемого рабочего органа шуп датчика занимал положение, соответствующее нулевому сигналу на выходе датчика. При отклонениях глубины хода рабочего органа от заданного значения в ту или иную сторону на вькоде датчика появляется электрический сигнал, уровень которого пропорционален величине отклонения, а полярность определяется направлением отклонения, Суммирующий усилитель 4 совместно с трехпозиционным уси.пителем 6,. электрогидравлическим преобразователем 8 и исполнительным механизмом 10 образуют один канал управления. Другой канал управления образуют суммирующий усилитель 5, трехпозкционный усилитель 7, электрогидравлкческий преобразователь 9 и исполнительный механизм 11.
Система работает следуняцим образом.
Сигналы крайнего 1 и среднего 3 датчиков глубины хода поступают на суммирующий усилитель 4 а суммарный сигнал - на вход трехпозиционного усилителя 6. Если суммарный сигнал
9 . 2
на входе трехпозиционного усилителя 6 не превьшает по уровню порога срабатывания, то на его выходе сигнал равен нулю. В противном случае на
выходе трехпозиционного усилителя 6 появляется сигнал постоянного уровня j полярность которого соответствует полярности суммарного сигнала на. его входе. Управляющий сигнал с вы-
хода трехпозиционного усилителя 6 поступает на вход электрогидравлического преобразователя 8, который в зависимости от полярности входного бигнала заставляет перемещаться шток
ciinoBoro гидроцилиндра исполнительного механизма 10 на заглубление или выглубление рабочих органов. Полярности сигналов канала управления выбраны таким образом, чтобы обратная
связь с выхода канала на его вход была отрицательной и система автоматического регулирования поддерживала заданную глубину хода рабочих органов. На вход суммирующего усилите-
ля 5 поступают сигналы датчиков 2 и 3 глубины хода.
Второй канал работает аналогично первому, стабилизируя глубину хода
своей группы рабочих органов.
Эффективность системы автоматического регулирования глубины хода рабочих органов по точности копирования микрорельефа видна из теоретических
зависимостей нормированной квадратичной погрешности копирования В от относительной протяженности периода колебания микрорельефа гармонического вида /U (фиг. 2), равной отношению
абсолютной протяженности периода колебаний микрорельефа к длине базы орудия (база орудия - расстояние между его крайними рабочими органами).
Зависимость I соответствует предельной точности копирования в случае идеальной по динамическим свойствам системы и абсолютно полной информации о профиле микрорельефа поля
Б пределах базы орудия.
Зависимость III отражает принципиальную пох решность копирования системой с двумя датчиками 1 и 2 глубины хода, установленными у крайних
рабочих органов.
Зависимость II соответствует погрешности копирования предлагаемой системой с тремя датчиками глубины ода,
Формула изобретения Система автоматического регулирования глубины хода райочих органов сельскохозяйственных машин и орудий, включающая два канала регулирования с соединенными последовательно датчиками глубины хода, которые установлены на базе орудия у крайних рабочих органов, усилителями, электрогидравлическими преобразователями и исполнительными механизмами, о т- личающая с я тем, что, с целью повышения стабильности глубины хода рабочих органов и улучшения
эксплуатационных характеристик машинно-тракторного агрегата, она снабжена дополнительным датчиком глубины хода, которьм установлен в середине базы орудия, и двумя суммирующими усилителями, первые входы которых соединены соответственно с выходами первого и второго датчиков глубины хода, а вторые входы - с выходом дополнительного датчика глубины хода, при этом выходы суммирующих усилителей соединены с входами соответствующих электрогидравлических преобразователей.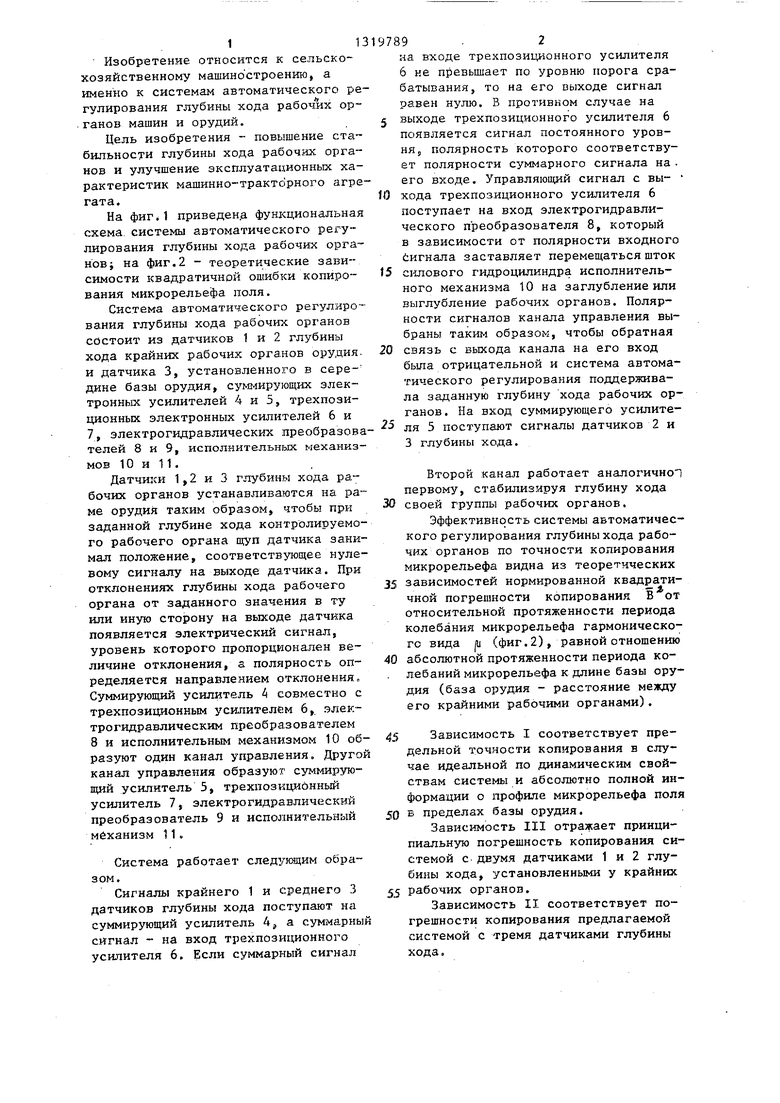
| название | год | авторы | номер документа |
|---|---|---|---|
| Широкозахватное почвообрабатывающее орудие | 1990 |
|
SU1789089A2 |
| УСТРОЙСТВО ПЕРЕДАЧИ УПРАВЛЕНИЯ | 2014 |
|
RU2551795C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛИННОБАЗНОГО АВТОПОЕЗДА | 2015 |
|
RU2604376C1 |
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2002 |
|
RU2223527C2 |
| Устройство автоматического управления дреноукладчиком | 1980 |
|
SU960393A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2308619C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТУРБИНЫ | 1972 |
|
SU421785A1 |
| Электрогидравлическая система автоматического регулирования тяговой загрузки трактора | 1984 |
|
SU1294302A1 |
Изобретение относится к сельскому хозяйству. Цель изобретения - повышение стабильности глубины хода рабочих органов и улучшение эксплуатационных характеристик машинно-транспортного агрегата. Устройство снабжено датчиками 1, 2 глубины хода крайних рабочих органов. Датчик 3 установлен в середине базы орудия. Сигналы крайних датчиков 1,2 попарно суммируются с сигналом датчика 3 суммирующими электронными усилителями 4 и 5 . Если сигнал на входе трех- позиционного электронного усилителя 6 или 7 превышает уровень порога срабатывания, появляется управляющий сигнал. Управлякиций сигнал через электрогидравлический преобразователь 8 или 9 воздействует на исполнительный механизм 10 или 11. Исполнительный механизм 10 или 11 заглубляет или выглубляет соответствующий рабо- чий орган. 2 ил. (Л с со 00 со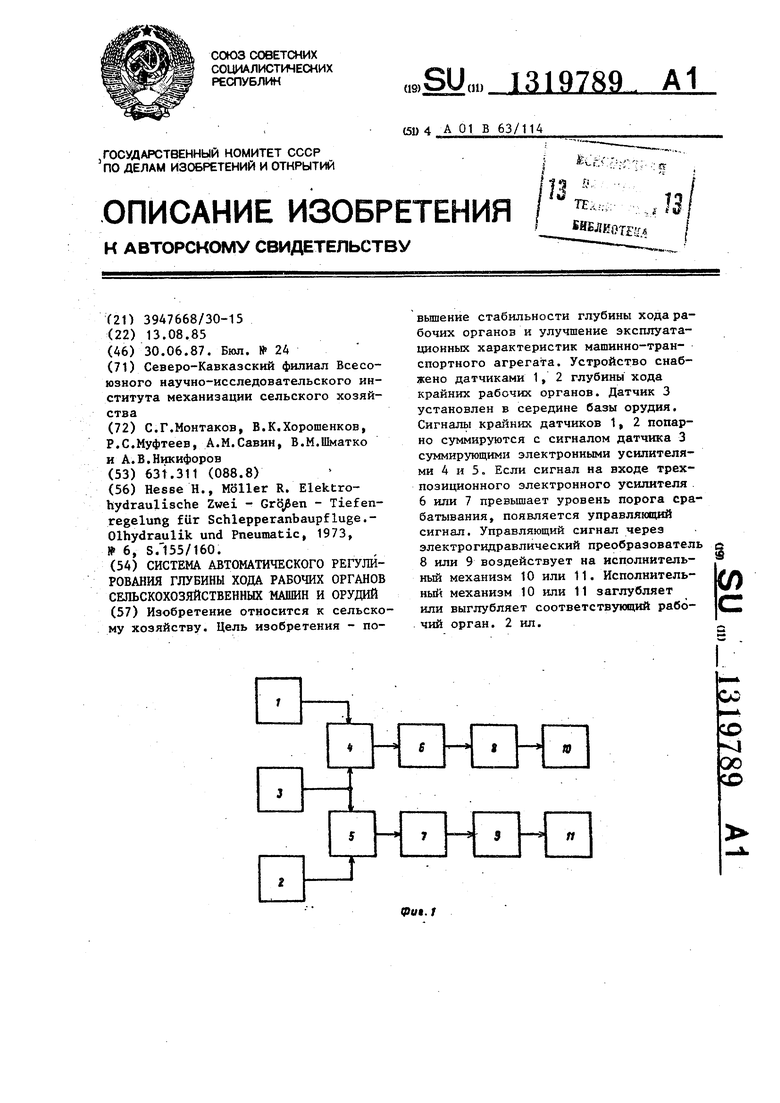
Редактор Н.Швыдкая
Составитель С.ЗарУцкий Техред Н.Глущенко
Заказ 2538/1 Тираж 629Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
фиг. 2
Корректор Л.Патай
| Hesse Н., Moller R | |||
| Elektro- hydraulische Zwei - Gro/en - Tiefen- regelung fiir Schlepperanbaupfluge.- Olhydraulik und Pneumatic, 1973, 6, S.155/160. |
