Изобретение относится к подъемно-транспортным механизмам и может быть использовано для транспортирования туш животных на мясоперерабатывающих предприятиях.
Цель изобретения - повышение надежности работы за счет исключения зон пересечения толкателей.
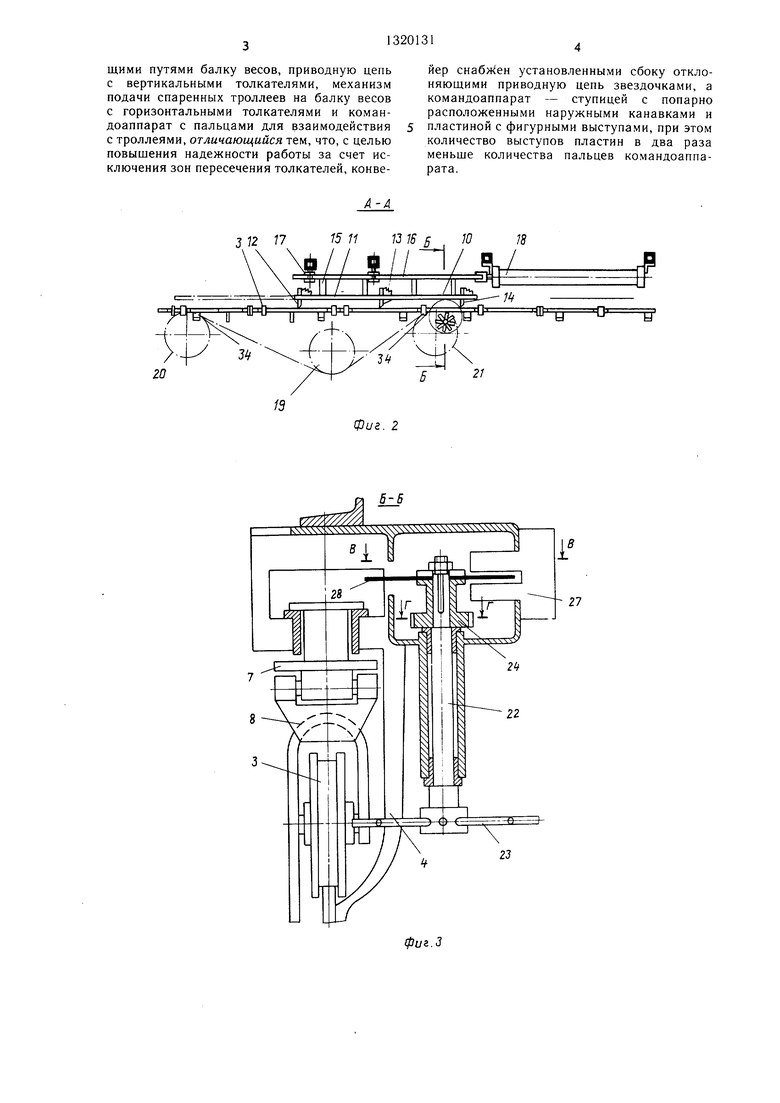
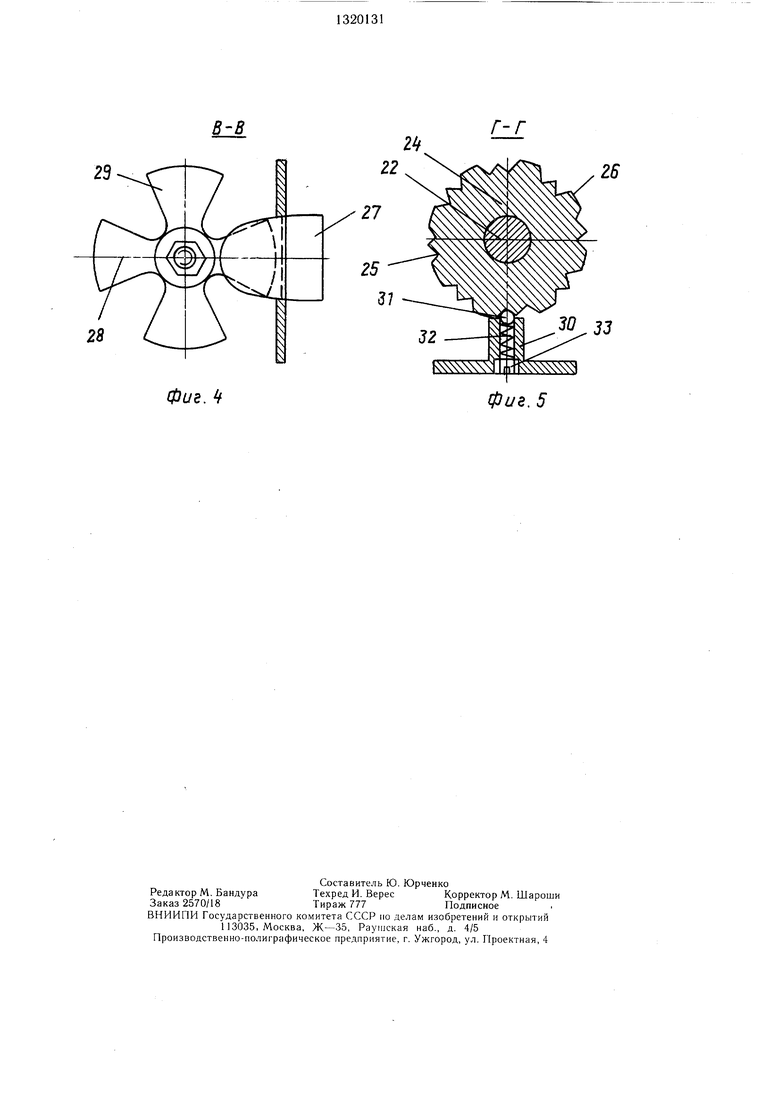
На фиг. 1 показан конвейер общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 3.
Подвесной конвейер для транспортирования туш животных содержит направляющие пути 1 и 2 для троллеев 3 с подвешенными на них тушами животных. Направляющие пути прикреплены при помощи кронштейнов 4 к каркасу 5 здания (не показано). Между направляющими путями 1 и 2 расположена балка весов 6. Троллеи 3 перемещаются по направляющим путям 1 и 2 при помощи приводной цепи 7, оснащенной вертикальными толкателями 8. На балку весов 6 троллеи 3 подаются дополнительным механизмом 9. Перед дополнительным механизмом 9 установлен командоаппарат 10. Дополнительный механизм 9 содержит щтангу 11 с горизонтально установленными толкателями 12, 13 и 14. Штанга 11 связана стяжками 15 с параллельно расположенной направляющей 16, установленной на роликах 17. Направляющая 16 соединена со штоком пнев- моцилиндра 18, управляемого пневморас- пределителем (не показан).
Конвейер снабжен установленными сбоку отклоняющими звездочками 19, 20 и 21. Командоаппарат 10 содержит установленный в корпусе на подшипниках вал 22 с жестко закрепленными с одного конца пальцами 23 и ступицей 24 с другого конца вала 22. Ступица 24 выполнена с канавками 25 на ее наружной поверхности 26. Сбоку командоаппарата 10 над ступицей 24 установлен конечный выключатель 27. Сверху на ступице 24 установлена пластина 28 с фигурными выступами 29, расположенными с возможностью взаимодействия с конечным выключателем 27. Количество канавок 25 на ступице 24 вдвое больше количества пальцев 23. Канавки 25 расположены на наружной поверхности 26 попарно, для обеспечения надежной работы как в прямом, так и при реверсивном движении штанги 11. Вал 22 оснащен фиксатором 30, выполненным в виде щарика 31, поджатого пружиной 32, и регулируемого винтом 33.
Вал 22 зафиксирован в положении, при котором взаимодействующий с троллеем 3 палец 23 расположен под острым углом к подвесному направляющему пути 1 или 2, что исключает случайное взаимодействие троллея со смежным пальцем из- за увеличенного зазора между ними.
0
Огибая звездочки 19, 20 и 21 приводная цепь 7 отклоняется от направляющих путей на величину большую, чем полусумма щирины вертикального толкателя 8 и ширины кронштейна троллея 3. По длине участок 34 смещения должен быть меньше суммы расстояния между крайними горизонтальными толкателями 12 и 14 и ходом штанги 11 и больше суммы шага горизонтальных толкателей и хода щтанги 11.
Командоаппарат 10 установлен перед первой отклоняющей звездочкой 20, т. е. в самом начале отклоняющего участка 34 цепи 7.
5 Конвейер работает следующим образом. Троллеи 3 с подвешенными к ним полутушами животных захватываются вертикальными толкателями 8 приводной цепи 7 и перемещаются по направляющему пути 2 в зону расположения штанги 11 дополни0 тельного механизма 9. При этом первый троллей проходит сначала мимо первого горизонтального толкателя 14 штанги 11, который «прощелкивается по нему, воздействует на палец 23 командоаппарата 10,
5 поворачивая вал 22 на один шаг и, дойдя до участка 34, останавливается, так как вертикальный толкатель 8 выходит из зацепления с троллеем 3. При этом вал 22, поворачиваясь под действием троллея 3, вводит фигурный выступ 29 пластины 28 в паз
0 конечного выключателя 27, который дает команду на приведение системы управления (не показан) дополнительным механизмом 9 в исходное положение.
Второй троллей, перемешаясь аналогично первому, взаимодействует с командо5 аппаратом 10, который дает команду на рабочий ход пневмоцилиндра 18 со штангой 11. При рабочем ходе штанги 11 первый толкатель 14 Захватывает второй троллей 3 и перемещает его на промежу- , точную позицию перед балкой весов 6, образуя таким образом как бы тушу животного, подвешенную на двух троллеях, т. е. образуются спаренные троллеи 3. После образования следующей пары троллеев 3 первая пара троллеев 3 выталкивается на
5 балку весов 6 и взвещивается. При следующем ходе штанги 11 находящаяся на балке весов 6 пара троллеев 3 перемещается с нее в зону действия вертикальных толкателей 8 приводной цепи 7, а находящаяся перед балкой весов 6 попадет на нее,
0 а предыдущая - на промежуточную позицию перед балкой весов 6. Дальнейщая работа производится аналогично описанному
Формула изобретения
5 Подвесной конвейер для транспортирования тущ животных, включающий направляющие пути для троллеев с полутушами животных, расположенные между направляющими путями балку весов, приводную цепь с вертикальными толкателями, механизм подачи спаренных троллеев на балку весов с горизонтальными толкателями и коман- доаппарат с пальцами для взаимодействия с троллеями, отличающийся тем, что, с целью повышения надежности работы за счет исключения зон пересечения толкателей, конвейер снабл ен установленными сбоку отклоняющими приводную цепь звездочками, а командоаппарат - ступицей с попарно расположенными наружными канавками и пластиной с фигурными выступами, при этом количество выступов пластин в два раза меньше количества пальцев командоаппа- рата.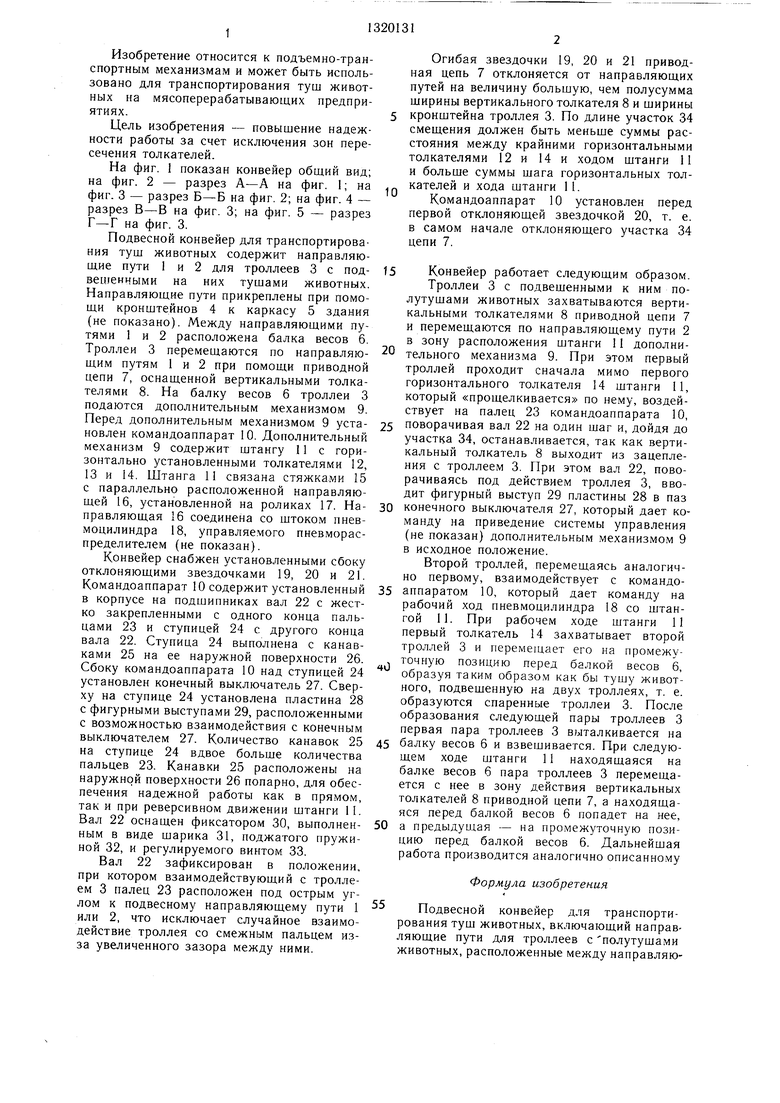
Изобретение относится к подъемно- транспортным механизмам и повышает надежность работы за счет исключения зон пересечения толкателей (Т). Конвейер включает направляющие пути 1 и 2 для троллеев 3. Между путями 1 и 2 расположена балка весов 6. Троллеи 3 перемещаются при помощи приводной цепи 7 с вертикальными Т 8. Для отклонения цепи 7 служат отклоняющие звездочки. На балку весов 6 троллеи 3 подаются механизмом 9 с горизонтально установленными Т. Перед ме ханизмом 9 установлен командоаппарат (КА) с пальцами для взаимодействия с троллеями 3. При этом КА снабжен ступицей с попарно расположенными наружными канавками. На ступице установлена пластина с фигурными выступами, расположенными с возможностью взаимодействия с конечным выключателем. Кол-во выступов в два раза меньше кол-ва пальцев КА. Троллеи 3 захватываются Т 8. Первый троллей 3 проходит мимо первого горизонтального Т, который воздействует на палец КА и ос- натавливается. Выступ пластины вводится в паз конечного выключателя. Второй троллей 3 перемещается аналогично первому. Первый горизонтальный Т перемещает второй троллей 3 на промежуточную позицию перед балкой весов 6, образуя спаренные троллеи 3. 5 ил. 163 17
7 72 7715 11 13 16 5 0IS
/СГШ I/
21
Фиг. 2
б-В
23
в-в
23
28
Г-Г
фиг.
фиг. 5
| Подвесной конвейер для транспортировки туш животных | 1971 |
|
SU480610A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
