вода 6 осевого перемещения и взаимодействию захвата .4 с обрабатываемой деталтзю 25, При этом от концевого выключателя 21 на гидростанцию 23 подается команда на. начало работы в режиме подачи шпинделя 10, Под давлением жидкость поступает по трубопроводу 16, соответственно привод 6 осевого перемещения поворачивает через шарнир 7 рычаг 8 Так как шарнир 11 рычага 8 неподвижен, то средняя часть 9 рычага 8 перемеЕ1ает шпиндель 10 на обрабатываемую деталь 25 до тех пор, пока рычаг 8 не войдет
1
Изобретение относится к автомати- ческим металл о . станкам и может быть использовано при автоматизации процесса сверления корпусных: деталейр например станин металлорежу дих станков,
Цель изобретения - расширение технологических возможностей за счет обработки тяжелых корпусных деталей, - .
На чертеже изображена принципиальная схема сверлильного ро.бота.
Сверлильный робот содержит колонну 1, сверлильную головку 2, руку 3 манипулятора, захват 4, привод 5 по- ворота, привод 6 осевого перемещения шарнир 7, рычаг 8 со средней частью 9 и шпиндель 10, шарнир 11 рычага 8 и привод 12 подачи, трубопроводы 13- 18, коьщевые выключатели 19-22, гид- ростанцию 23, сверло 24„
На колонне 1 установлена сверлильная головка 2 с возможностью-перемещения вдоль ее оси. На колонне 1 закреплены рука 3 манипулятора и при- вод 5 поворота, привод 12 подачи установлен на станине. Рука 3 манипулятора соединена с приводом 5 ее поворота и имеет захват 4 с приводом б его осевого перемещения, взаимо- действующий с обрабатываемой деталью 25, и с помощью шарнира 7 соединена с рычагом 8, Средняя часть 9 рычага 8 взаимодействует со шпинделем 10 сверлильной головки 2, а его шарнир 11 - со штоком привода 12, Привод 5 поворота имеет трубопроводы 13 и 14,
в контакт с концевым выключателем 19, Концевой выключатель 19 подает сигнал на гидростанцию 23 и поступление жидкости .по трубопроводу 16 прекращается 5 перекрывается ее слив по трубопроводу 17 в привод 12, При этом осуществляется поворот рычага 8 относительно неподвижного шарнира 7 и происходит подача шпинделя iO до срабатывания концевого выключателя 20, после чего повторяется цикл работы привода б осевого перемещения до тех пор, пока обрабатываемая деталь 25 не будет просверлена, 1 ил.
привод б осевого перемещения, - трубопроводы 15 и 16, а привод 12 - трубопроводы 17 и 18, На шпинделе 10 закреплены концевые выключатели 19 и 20 на захвате 4 - концевой выключатель 21, а на приводе 12 - концевой выключатель 22, Гидростанция 23 расположена под колонной 1 и представляет собой систему управления подачей жидкости по трубопроводам 13-18 к приводам 5, 6 и 12 и взаимодействует электрически, например, с помощью электромагнитной золотниковой системы с концевыми выключателями 19-22, Сверло 24 закреплено в шпинделе 10 и выпо л- няет сверление обрабатываемой детали 25 Сверлильная головка 2 имеет возможность перемещения по колонне 1 вдоль ее оси, а шпиндель 10 - вдоль оси головки 2, I
Сверлильньш робот работает следующим образом,
В исходном положении приводы 5 и б работают от трубопроводов 13 и 15, в результате под давлением жидкости захват 4 выдвинут рука 3 манипулятора откинута вверх, сверло 24 отведено от обрабатываемой детали 25, При подаче жидкости по трубопроводу 14 срабтывает привод 5 поворота и рука 3 манипулятора занимает горизонтальное положение, а поступление жидкости по трубопроводу 16 приводит к срабатыванию привода б осевого перемещения и взаимодействию захвата 4 с обрабатываемой деталью 25, При этом от кон
313
цевого выключателя 21 на гидростанцию 23 подается команда на начало работы в режиме подачи шпинделя 10,
Под соответствуняцим давлением (режима подачи) жидкость поступает по трубопроводу 16, привод 6 осевого перемещения поворачивает через шарнир ,7 рычаг 8, Так как шарнир 11 рычага 8 неподвижен, то средняя часть 9 рычага 8 перемещает шпиндель 10 на обрабатываемую деталь 25 до тех пор, пока рычаг 8 не войдет в контакт с концевым выключателем 19, После этого концевой выключатель 19 подает сигнал на гидростанцию 23 и поступление жидкости по трубопроводу 16 прекращается, перекрывается ее слив по трубопроводу 15, жидкость начинает поступать по трубопроводу 17 в привод 12, Осуществляется поворот рычага 8 относительно неподвижного шарнира 7 и про исходит подача шпинделя 10 до срабатывания концевого выключателя 20, после чего повторяется цикл работы привода 6 осевого перемещения и т,д, до тех пор, пока обрабатьшае- мая деталь 25 не будет просверлена,
В конце сверления рычаг 8 входит в контакт с концевым выключателем 22 и подает команду на гидростанцию об отключении режима подачи, при этом жидкость начинает поступать по трубопроводам 15 и 18, а затем по трубопроводу 17, приводя сверлильный ро- бот в исходное положение.
Составитель А,Позняк Редактор В,Петраш Техред И.Попович Корректор С,Шекмар
-:S
Заказ 2707/10 Тираж 953 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д, 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
84
При такой работе сверлильного робота подача сверла 24 осуществляется прерывисто, что приводит к дроблению стружки и повышает стойкость сверла 24, снижает силы резания. Подача с . помощью рычага 8 позволяет унизить рабочее усилие на приводах 6 и 12 и тем самым снизить затраты мощности, выполнять менее жесткими и массивными узлы и детали робота. Механический захват детали является надежным и исключает опрокидывание робота при увеличении подачи.
0 5
f5 Формула изобретения
Сверлильный робот, содержащий колонну, установленную на ней сверлильную головку и руку манипулятора , с захватом, отличающийся тем, что, с целью расширения технологических возможностей за счет обработки тяжелых корпусных деталей, он снабжен приводом подачи сверлильной головки, рычагом, шарнирно связанным со штоком силового цилиндра и образующим своей средней частью враща- тельно-поступательную пару со шпинделем сверлильной головки, а рука манипулятора снабжена приводом ее поворота относительно колонны, соединенным шарнирно с этой колонной, и приводом осевого перемещения руки, корпус которого соединен с помощью вращательно-поступательной пары с вторым концом указанного р 1чага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сверлильная головка с автоматическим регулированием подачи | 1977 |
|
SU680818A1 |
| МАНИПУЛЯТОР С РУКОЙ | 2015 |
|
RU2707877C2 |
| Устройство к токарному автоматудля СВЕРлЕНия ОТВЕРСТий | 1979 |
|
SU804212A1 |
| Сверлильно-резьбонарезной полуавтомат | 1983 |
|
SU1098700A1 |
| Роторный сверлильный автомат | 1979 |
|
SU772742A1 |
| Переносная сверлильная машина | 1979 |
|
SU772745A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЦИКЛОМ СТУПЕНЧАТОЙ ПОДАЧИ НА СТАНКАХ ГЛУБОКОГОСВЕРЛЕНИЯ | 1971 |
|
SU429927A1 |
| АВТОМАТИЧЕСКАЯ КЛЕПАЛЬНАЯ МАШИНА | 1993 |
|
RU2106926C1 |
| Сверлильная головка | 1980 |
|
SU956175A1 |
| Сверлильная головка | 1987 |
|
SU1442333A2 |
Изобретение относится к области машиностроенияi в частности к авто/б 6 / f IL/ - Го матическим металлорежущим станкам, и может быть использовано при автоматизации процесса сверления корпусных деталей, например станин металлорежущих станков. Цель изобретения - расширение технологических возможностей за счет обработки тяжелых корпусных деталей. При подаче жидкости по трубопроводу 14 срабатывает привод 5 поворота и рука 3 манипулятора занимает горизонтальное положение, а поступление жидкости по трубопроводу 16 приводит к срабатыванию при- f5 (Л с ///////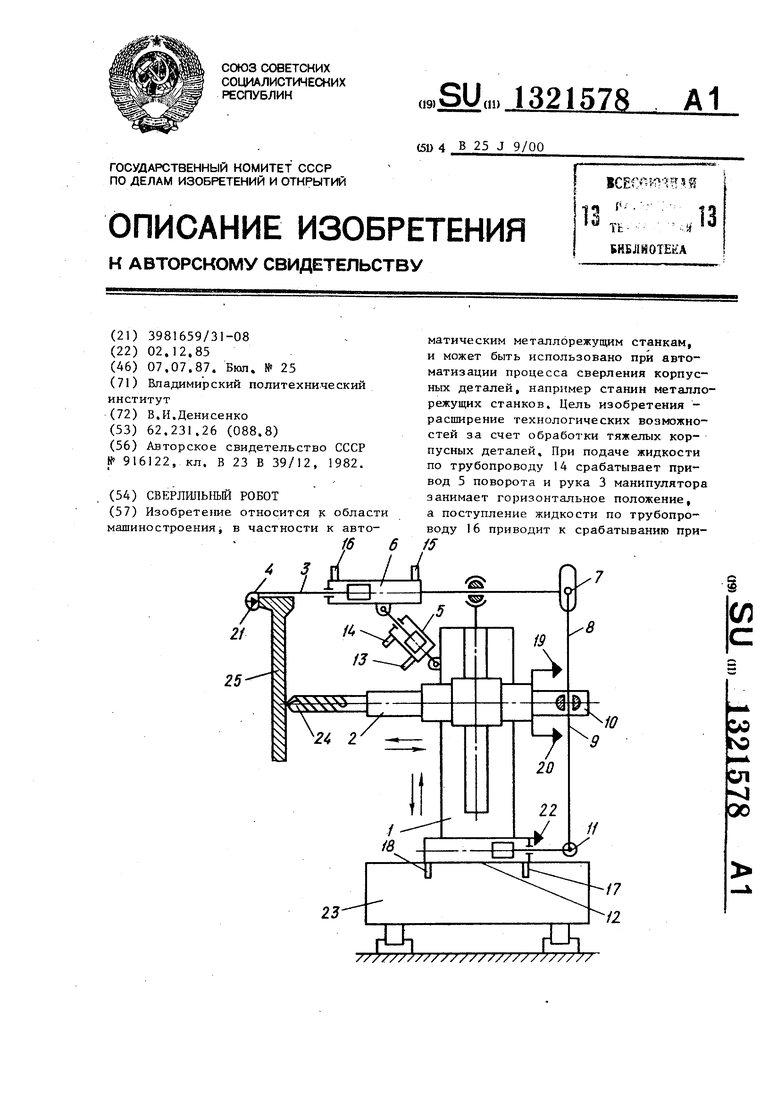
| Авторское свидетельство СССР № 916122, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
