Изобретение относится к машиностроению и может быть использовано для прецизионного перемещения виброизолированных рабочих органов манипуляторов .
Цель изобретения - повышение точности и быстродействия.
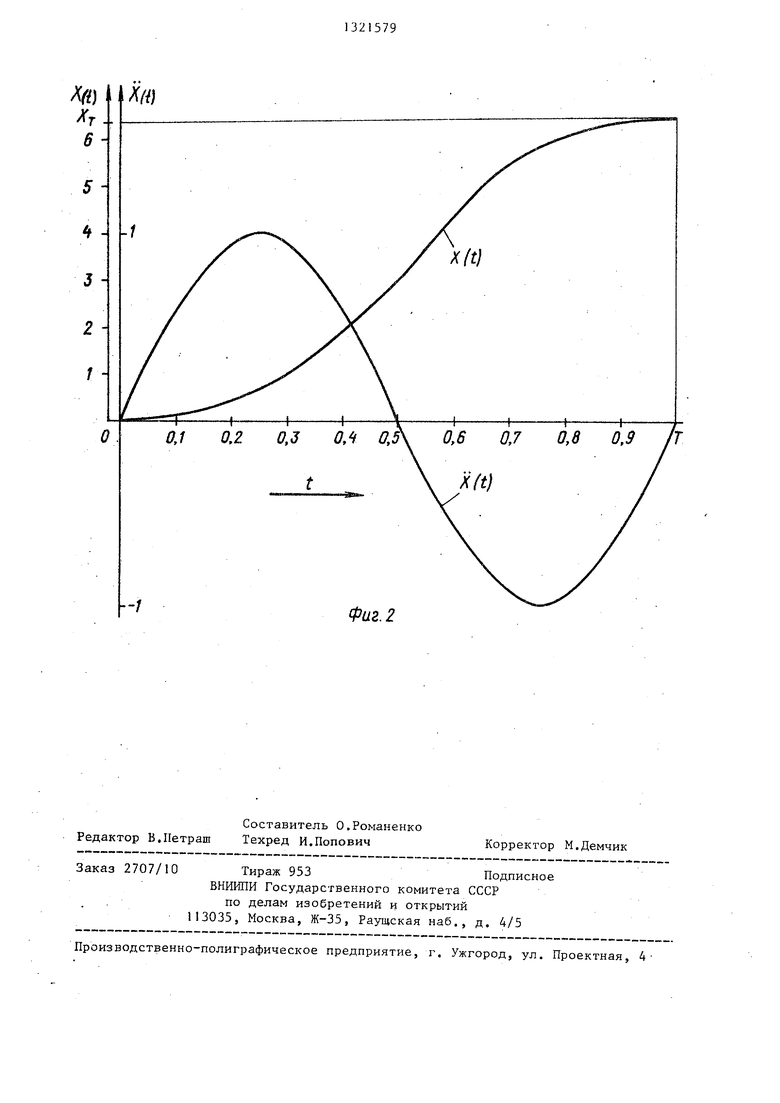
На фиг. 1 представлена функциональная схема устройства для реализации способа управления манипулято- ром; на фиг. 2 - кривые закона движения рабочего органа манипулятора.
Устройство содержит упругий элемент 1 с. управляемой жесткостью и исполнительный механизм 2, установлен- ный параллельно между рабочим органом 3- манипулятора и основанием 4, блок 5 формирования сигнала управления, подкл оченный выходом к входу блока 6 двукратного интегрирования и входу исполнительного механизма 2. Выход блока 6 подключен к управляющему вхо
ду упругого элемента 1, а вход блока 5 подключен к выходу блока 7 программного управления. Кроме того, блок 7 .подключен к управляющему входу блока 5 и выходу блока 6. Кроме того, обозначено: X(t) - закон изменения ускорения; X(t) - закон изменения перемещения рабочего органа манипулятора F(t) - управляющее усилие; U-; - сигнал, пропорциональный ускорению рабочего органа; И - сигнал, пропорциональный перемещению рабочего
органа.
Способ осуществляют следующим образом.
Для перемещения рабочего органа 3 манипулятора, виброизолированного от основания 4, на орган 3 необходимо воздействовать таким усилием,при котором в конце и начале перемещения не возбуждаются паразитные колебания, Это достигается в том случае, когда ускорение рабочего органа, вызванное воздействием управляющего усилия, соответствует закону показанному кривой X(t). Математически это можно представить следующим образом:
О,
Хо
о,
. 21Г sin -- t.
при t 0, при О t ; Т, при t Т,
При управлении движением рабочего органа 3 по заданной программе сиг- нал программного управления с выхода блока 7 подается на вход блока 5, в котором формируется сигнал управления движением рабочего органа 3, который
можно представить следующим уравнением:
О,
2 Ппри t О,
и Ui( sin -- t, при О.Г t Т, О/ при .
где V-- амплитудное значение сигнал
° управления;
Т - длительность периода сигнала управления; t - текущее время. Далее сигнал управления с выхода блока 5 подается на вход исполнительного механизма 2, который преобразуется в силу F(t), управляющую движением рабочего органа 3 манипулятора. Управление движением можно представить уравнением
О,
FOо,
при t О, при О t при t Т,
sin - t, при О t «i Т,
,
X
о
F(t)K|X(
где F(t)K|X(t);
К, - линейный коэффициент исполнительного механизма,
Так как F(t)m-X(t) и , где тп - масса рабочего органа - постоянная величина, закон изменения ускорения рабочего органа удовлетворяет условию стабильного движения рабочего органа (кривая X(t), фиг.2).
Для того, чтобы при перемещении рабочего -органа 3 жесткость упругого элемента 1 оставалась постоянной, необходимо осуществить регулировку жесткости упругого элемента 1 в зависимости от величины перемещения, рабочего органа. Для этого выходной сигнал блока 5 формирования сигнала подается на вход блока двукратного интегрирования, на выходе которого получается сигнал, пропорцио- нальньй перемещению X(t) рабочего органа 3. Полученный сигнал можно представить следующим уравнением:
Ux
0
О,
при tiO
5
Т 2 917 П
,--t,пpи , О,при ,
где .X(t);
К коэффициент пропорциональности между выходным сигналом блока 6 и перемещением рабочего органа 3;
и -2-4 х„-к,
Осуществляя двукратное интегрирование сигнала управления, считают,
что в начальный момент времени, т.е. при , , где U; - сигнал, , пропорциональный скорости рабочего органа, т.е. сигнал после однократного интегрирования сигнала . Этим обеспечивается стабильность в начале и конце перемещения рабочего органа.
Таким образом, закон стабильного перемещения рабочего органа, показан ный (фиг. 2) , .кривой X(t), который соответствует представленному уравнению выходного сигнала блока 6.
Для контроля за перемещением X(t) рабочего органа 3 выходной сигнал блока 6 подается на блок 7 программного управления, а для управления амплитудного значения Х перемещения рабочего органа управляющим сигналом с дополнительного выхода блока 7 программного упр авления изменяется передаточный коэффициент блока 5 формирования управляющего сигнала и, тем самым, изменяется амплитудное значе- ние сигнала управления U.,.
А
Ш)
р
мула II 3 о б р е т е н и
Способ управления манипулятором преимущественно с вертикально перемещенным виброизолированным рабочим органом, заключающийся в том, что рабочему органу сообщают направленное движение в соответствии с заданным законом, отличающийся тем, что, с целью повьшзения точности и быстродействия, управление движением рабочего органа осуществляют по закону
О,
F
при t 0,
о S in -- . t, при О t Т, О, при t Ь Т,
где Г„
- амплитудное значение силового воздействия;
Т - длительность периода закона управления; t - текущее время,
а жесткость виброизоляции изменяют по закону, соответствующему двукратно интегрированному закону управления рабочим органом.
иW W-

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления микроманипулятором | 1986 |
|
SU1445942A1 |
| Устройство для управления прецизионным микроманипулятором | 1986 |
|
SU1504090A1 |
| Устройство для программного управления с коррекцией программы | 1986 |
|
SU1352457A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Манипулятор | 1975 |
|
SU743861A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2012 |
|
RU2518806C2 |
| Способ программного управления приводом | 1986 |
|
SU1403330A1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2014 |
|
RU2565426C2 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
Изобретение относится к области машиностроения и может быть использовано для прецизионного перемещения виброизолированньгх рабочих органов манипуляторов. Целью изобретения является повьшение точности и быстродействия. Способ заключается в том, что виброизолированному рабочему органу сообщают направленное движение, управление которым осуществляется по закону F(t)0 при t fc О, Fj, S in (2 |Г: Т) t, при О - t Т, О, при t Т, где Ь д амплитудное значение силового воздействия; Т - длительность периода закона управления. Этот закон двукратно интегрируют и по результату интегрирования изменяют жесткость виброизоляции. 2 ил. Ф (О
/
. /
-;
Фаг. 2
Редактор В.Петраш
Составитель О.Романенко Техред И.Попович
Заказ 2707/10
Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раущская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Демчик
| Теория активных виброзащитных систем | |||
| Иркутск, 1974, с | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
