4ib 4 СЛ QD 4: Ю
Изобретение относится к машиностроению и может быть использовано для прецизионного перемещения виброизолированных рабочих органов, например микроманипуляторов, установленных на виброизолированном основании.
Целью изобретения является повышение точности и быстродействия за счет исключения возможности возникновения паразитных колебаний объекта и влияния перемещаемых механизмов друг на друга.
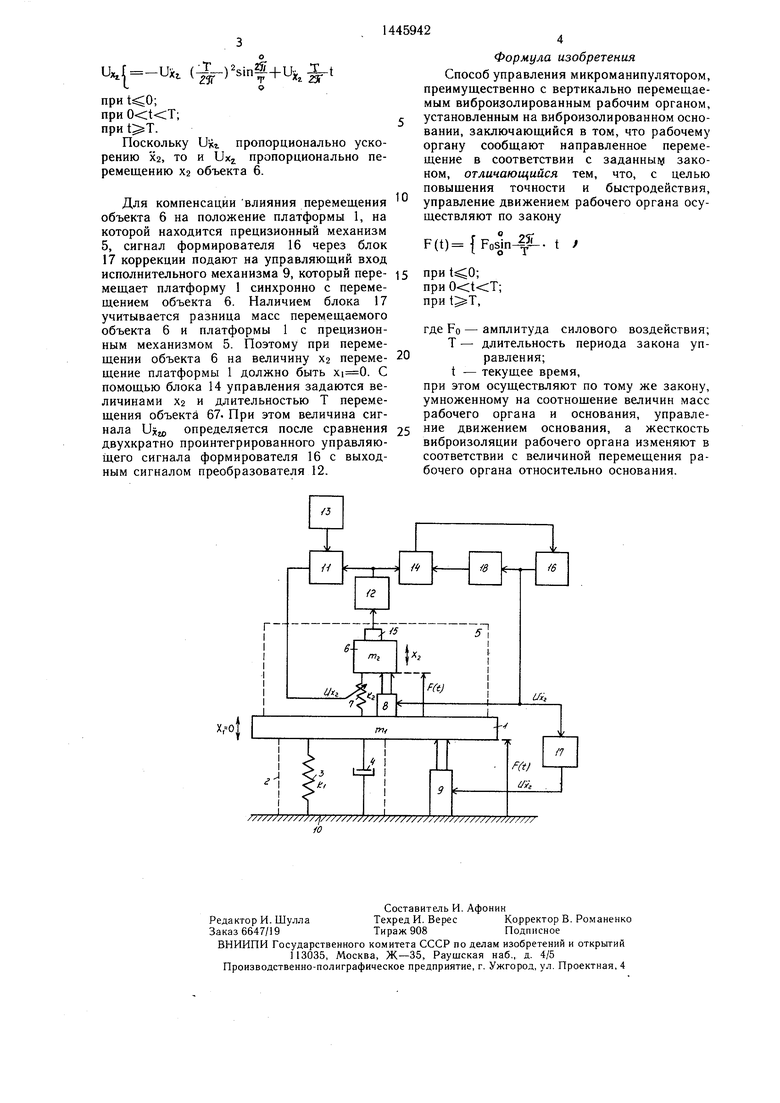
На чертеже представлена функциональная схема управления перемещаемых объектов презиционного механизма, например микроманипулятора.
Схема содержит платформу 1, установленную на виброизоляторе 2, состоящем из упругого элемента 3 и демпфирующего элемента 4, прецизионный механизм 5, установленный на платформе 1, в состав которого входит перемещаемый объект 6, связанный через управляемый упругий элемент 7 с платформой 1. Схема также содержит исполнительный механизм 8 перемещения Хг объекта 6, размещенный между объектом 6 и платформой 1 параллельно упругому элементу 7, и исполнительный механизм 9 перемещения платформы 1, расположенный между платформой 1 и основанием 10 параллельно виброизолятору 2. Управляющий вход упругого элемента 7 подключен к выходу сумматора 11, входами подключенного к выходам преобразователя 12 перемещения и источника 13 опорного напряжения. Выход преобразователя 12 также подключен к одному входу блока 14 управления, а его вход - к датчику 15 перемещения объекта 6. Выход формирователя 16 управляющего напряжения подключен к управляющему входу исполнительного механизма 8, через блок 17 коррекции, имеющий коэффициент, равный соотношению ma/mi величин масс Ш2 перемещаемого объекта 6 и Ш прецизионного механизма 5 вместе с платформой 1 - к управляющему входу исполнительного механизма 9, а ч ерез блок 18 двухкратного интегрирования - к второму входу блока 14 управления, выходом подключенного к управляющему входу формирователя 16.
Способ реализуется следующим образом.
Для стабильного перемещения виброизолированного объекта 6 необходимо воздействовать на объект 6 таким усилием F(t), при котором в системе (объект 6 - упругий элемент 7) не возбуждаются паразитные резонансные колебания. Это достигается лищь в том случае, если ускорение объекта 6, вызванное воздействием управляющего усилия F(t), в начале и конце перемещения объекта 6 равно нулю. Это, условие удовлетворяется следующим законом изменения ускорения:
( ° 4Г
sin- t - о т
при КО; при ,
где Х2 - максимальное значение ускорения
объекта 6;
Т - длительность периода сигнала управления.
Для получения такого закона ускорения Х2 с помощью блока 16 формируют электрический сигнал по формуле
их,-ихг„5 п. t
при
при
при ,
где Usjo - амплитудное значение сигнала
управления,
и подают на исполнительный механизм 8, преобразующий электрический сигнал Usi в силу F(t), перемещающую объект 6. Математически эту функцию силы можно представить формулой
25г зчг
F(t)| -osm- - -t
при при , 30 гдеР(1)К2и;;г ,
Fo K2U5;jp , К2 - линейный коэффициент преобразования исполнительного механизма 8;
FO - амплитудное значе35ние силы, приложенной к объекту 6.
Составляющая силы от движения массы
т2 системы F(t)rn2X2, откуда ..
40 Таким образом, управляющий сигнал Uis.
пропорционален ускорению Х2 объекта 6.
Так как объект 6 упруго подвешен относительно платформы 1, то, управляя движением массы mz силой F(t), необходимо одновременно управлять величиной упругости элемента 7. Для этого измеряют перемещение Х2 объекта 6 с помощью датчика 15, преобразователем 12 преобразуют это перемещение в электрический
сигнал Uxi и после суммирования этого сигнала с напряжением источника 13 опорного напряжения управляют величиной жесткости упругого элемента 7. Источник 13 опорного напряжения необходим для установления положения объекта 6 в исходное положение равновесия, т. е. при F(t)0 необходимо добиться, чтобы Uxi 0. Математически сигнал перемещения U можно представить следующим образом:
ил.(-их. (r) 4+45-t
LQ
при
при
при .
Поскольку Uiii пропорционально ускорению X2, то и Uxi пропорционально перемещению Х2 объекта 6.
Для компенсации влияния перемещения объекта 6 на положение платформы 1, на которой находится прецизионный механизм 5, сигнал формирователя 16 через блок 17 коррекции подают на управляющий вход исполнительного механизма 9, который пере- мещает платформу 1 синхронно с перемещением объекта 6. Наличием блока 17 учитывается разница масс перемещаемого объекта б и платформы 1 с прецизионным механизмом 5. Поэтому при перемещении объекта б на величину Х2 переме- щение платформы 1 должно быть . С помощью блока 14 управления задаются величинами Х2 и длительностью Т перемещения объекта 67- При этом величина сигнала Ujtjo определяется после сравнения двухкратно проинтегрированного управляющего сигнала формирователя 16 с выходным сигналом преобразователя 12.
Формула изобретения Способ управления микроманипулятором, преимущественно с вертикально перемещаемым виброизолированным рабочим органом, установленным на виброизолированном основании, заключающийся в том, что рабочему органу сообщают направленное перемещение в соответствии с заданны законом, отличающийся тем, что, с целью повыщения точности и быстродействия, управление движением рабочего органа осуществляют по закону
F(t) {Fosjn. t f
при при при ,
где FO - амплитуда силового воздействия; Т - длительность периода закона управления;
t - текущее время,
при этом осуществляют по тому же закону, умноженному на соотнощение величин масс рабочего органа и основания, управление движением основания, а жесткость виброизоляции рабочего органа изменяют в соответствии с величиной перемещения рабочего органа относительно основания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления прецизионным микроманипулятором | 1986 |
|
SU1504090A1 |
| Способ управления манипулятором | 1985 |
|
SU1321579A1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛЯТОР | 1995 |
|
RU2091630C1 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЦЕНТРИРОВКИ И СКЛЕЙКИ ЛИНЗ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078359C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ | 1996 |
|
RU2110709C1 |
| Микроманипулятор | 1980 |
|
SU901974A1 |
Изобретение относится к машиностроению и может быть использовано для прецизионного перемещения виброизолированных рабочих органов, например микроманипуляторов. Целью изобретения является повышение точности и быстродействия. Для этого закон управления рабочим органом формируют таким образом, чтобы его ускорение в начале и в конце периода закона управления было бы равно нулю. При этом для исключения возможности возникновения паразитных колебаний рабочего органа и влияния перемещаемых механизмов друг на друга осуществляют управление жесткостью виброизоляции рабочего органа в соответствии с величиной его перемещения, а также управление движением основания, на котором установлен рабочий орган, по тому же закону управления, скорректированному на величину соотношения масс рабочего органа и основания. 1 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Межвузовский тематический сборник научных трудов | |||
| - Вильнюс, 1981, с | |||
| Способ приготовления строительного изолирующего материала | 1923 |
|
SU137A1 |
