(54) МАНИПУЛЯТС
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления астатическим манипулятором | 1982 |
|
SU1037206A1 |
| Система управления дистанционным манипулятором | 1975 |
|
SU582090A1 |
| Система управления манипулятором | 1977 |
|
SU672613A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Манипулятор | 1974 |
|
SU561656A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Устройство для управления роботом | 1982 |
|
SU1261555A3 |
| Система управления манипулятором | 1978 |
|
SU729545A1 |
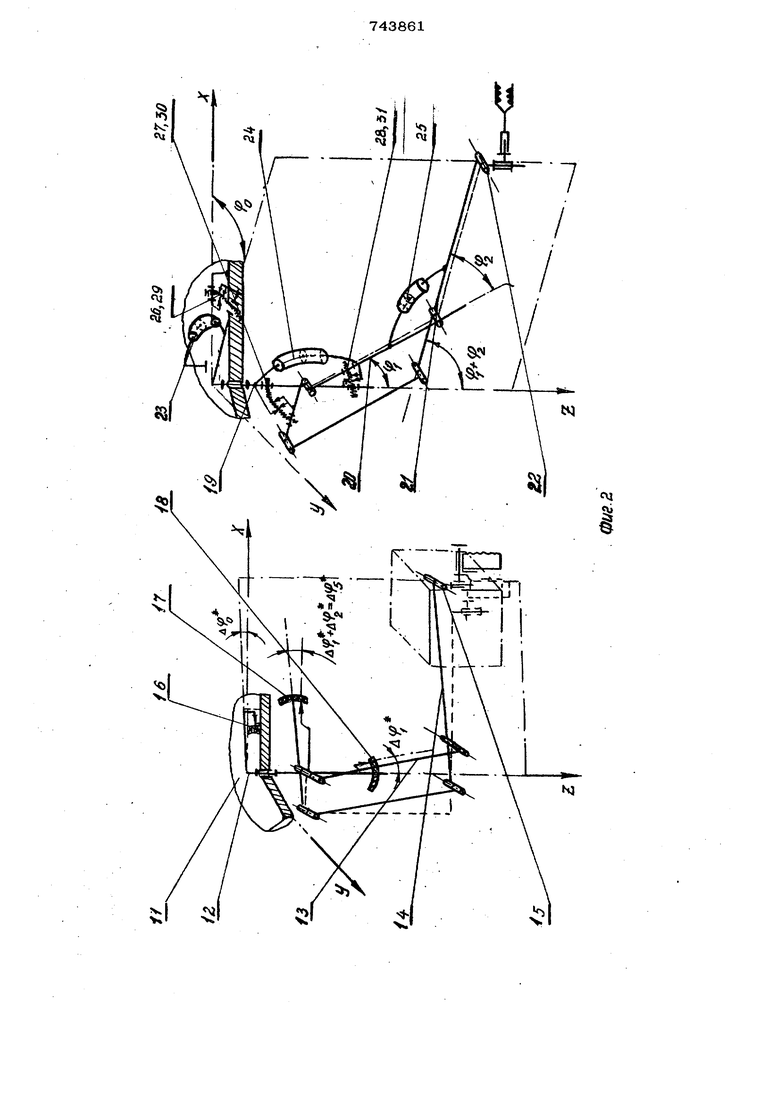
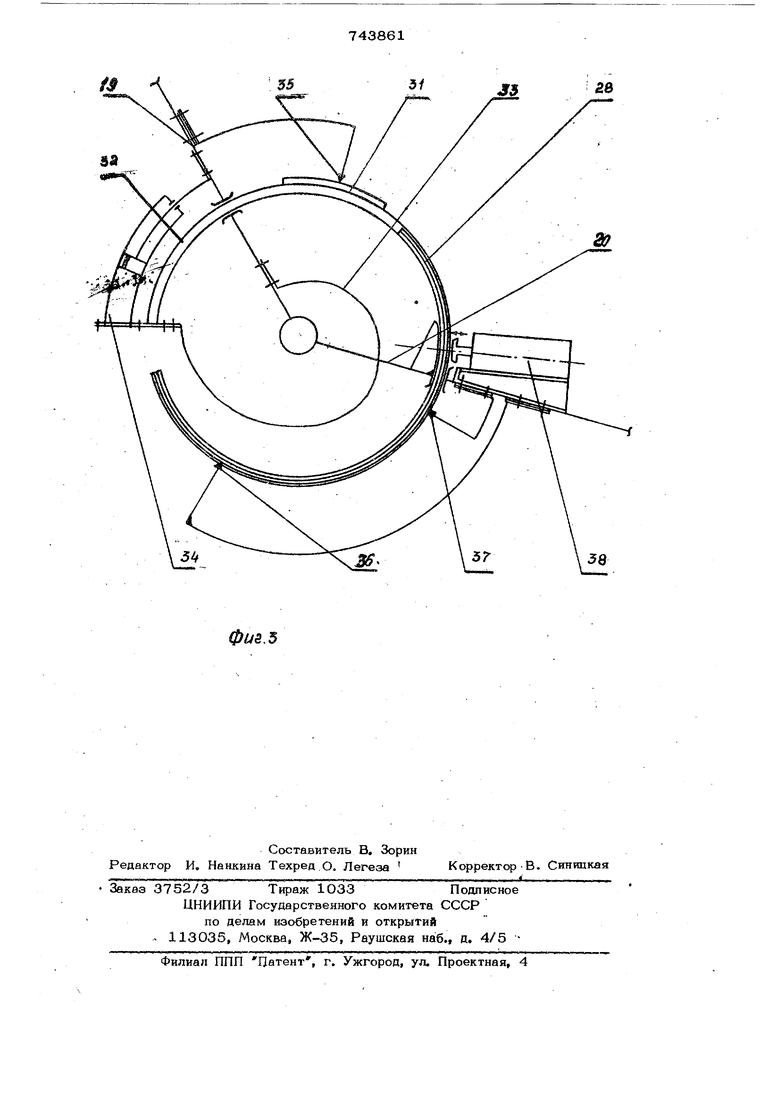
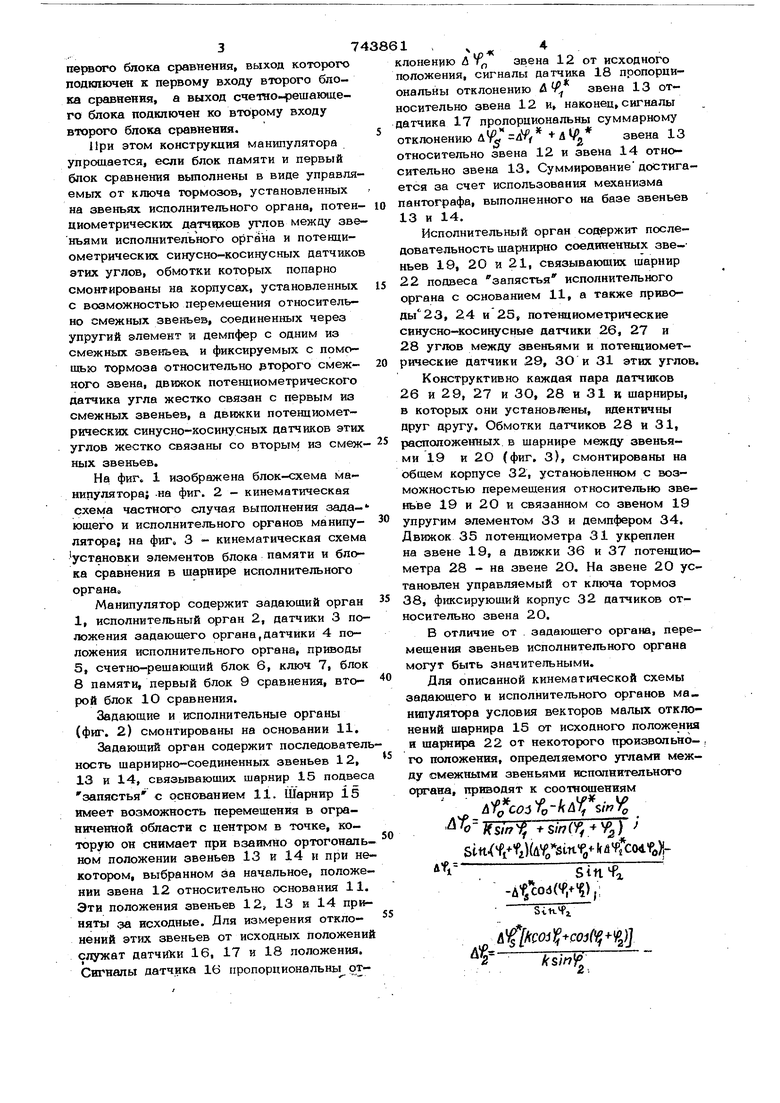
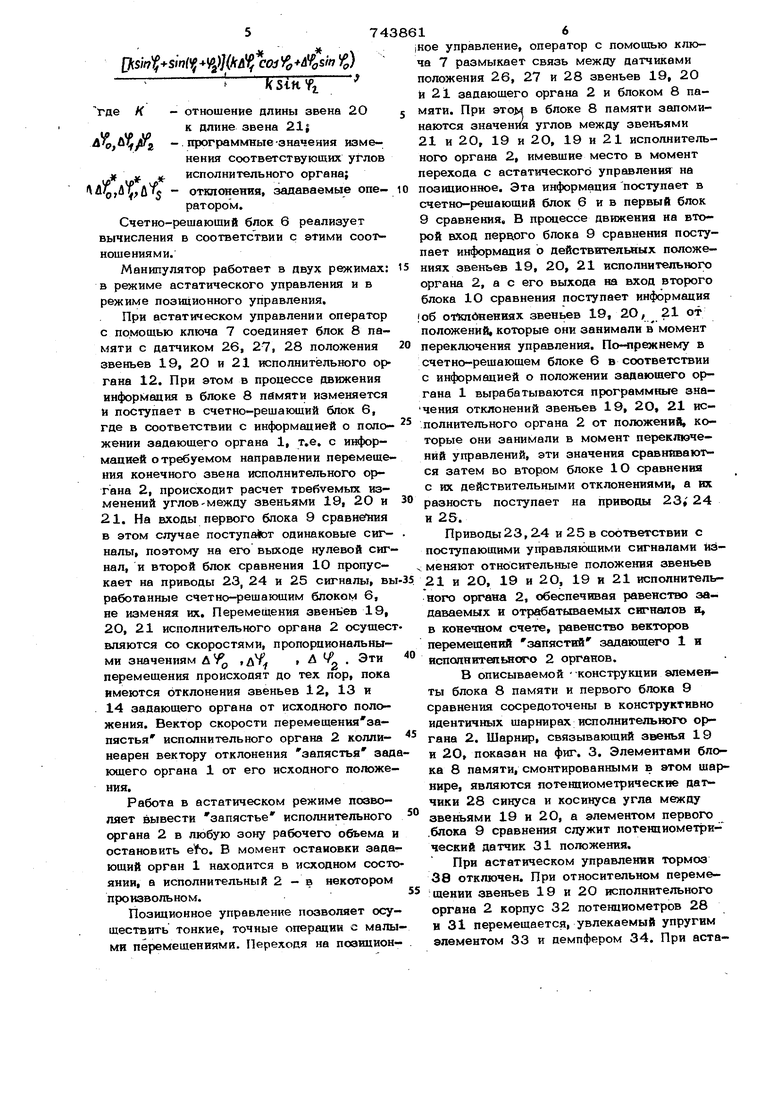
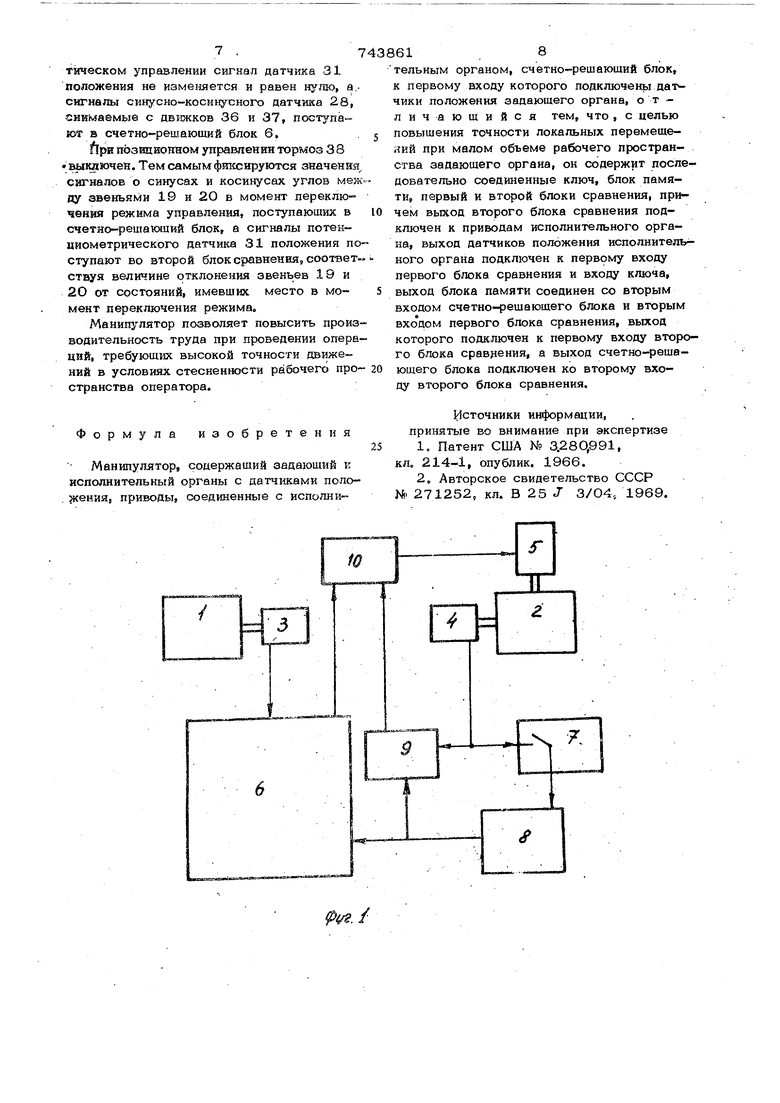
Изобретение относится к машиностроению и предназначено для усоверигенствования манипуляторов, используемых для механических операций, производимых в опас ных для здоровья человека зонах. Известны манипуляторы с позиционным управлением, у которых все, звенья исполнительных органов копируют положения соответствующих звеньев задающих с ганов, поэтому при точной отработке локаль ных движений исполнительных органов они требуют большого объема рабочего пространства задающих органов flj. Известны также манипуляторы с астатическим управлением, содержащие задак ший и исполнительный органы с датчиками положения, приводы, соединенные с исч полнительным органом, счетно-решающий блок, к первому входу которого подключены датчики положения задающего органа, ко второму входу -датчики положения кспол,ннтепьного органа, а выход подключен к приводам исполнительного оргайа C2J. Эти манипуляторы имеют при малом объеме рабочего пространства задающего органа низкую точность локальных движений. Цель изобретения - повьпиение точности локальных перемещений при малом объеме рабочего пространства задающего органа путем обеспечения наперед заданного соотношения между векторами перемещений конечных звеньев задающих и исполнительных органов манипулятора независимо от рассогласований его промежуточных звеньев. Указанная цель достигается тем, что манипулятор снабжен соединенными последовательно ключом, блоком памяти, первым и вторым блоками сравнения, лричем выход второго блока сравнения подключен к приводам исполнительного органа выход датчиков положения исполнительного. органа подключен к первому входу первого блока сравнения и входу ключа, выход ка памяти соедянен со вторят входом счетво-решающего блока в вторым входом. 37 первого блока сравнения, выход которого подключен к первому входу второго блока сравнения, а выход счетно-решающего блока подключен ко второму входу второго блока сравнения. При этом конструкция манипулятора упрощается, если блок памяти и первый блок сравнения вьтолнены в виде управля емых от ключа тормозов, установленных на звеньях исполнительного органа, потен циометрических датчввсов углов между зве ньями исполнительного органа и потенциометрических синусно-косинусных датчико этих углов, обмотки которых попарно смонтированы на корпусах, установленных с возможностью перемещения относительно смежных звеньев, соединенных через упругий элемент и демпфер с одним из смежных звеньев и фиксируемых с помощью тормоза относительно эторого смежного звена, движок потенциометрического датчика угла жестко связан с первым из смежных звеньев, а движки потенциометрических синусно-косинусных датчиков этих углов жестко связаны со вторым из смеж ных звеньев. На фиг. 1 изображена блок-схема манипулятора; -на фиг. 2 - кинематическая схема частного случая выполнения задающего и исполнительного органов манипулятора; на фиг, 3 - кинематическая схема установки элементов блока памяти и блока сравнения в шарнире исполнительного органа Манипулятор содержит задающий орган 1, исполнительный орган 2, датчики 3 поJюжeния задающего органа,датчики 4 положения исполнительного органа, приводы 5, счетно-решающий блок 6, ключ 7, блок 8 памяти, первый блок 9 сравнения, второй блок 1О сравнения. Задающие и исполнительные органы (фиг. 2) смонтированы на основании 11. Задающий орган содержит последователь ность щарнирно-соединенных звеньев 12, 13 и 14, связывающих шарнир 15 подвеса запястья с основанием 11. Шарнир is имеет возможность перемещения в ограниченной области с центром в точке, которую он снимает при взаимно ортогональном положении звеньев 13 и 14 и при некотором, выбранном за начальное, положении звена 12 относительно основания 11. Эти положения звеньев 12, 13 и 14 приняты да исходные. Для измерения отклонений этих звеньев от исходных положений служат датчики 16, 17 и 18 положения. Сигналы датчика 16 пропорциональны от1клонению Д Tfj эвена 12 от исходного положения, сигналы датчика 18 пропорциональны отклонению звена 13 относительно эвена 12 и, наконец, сигналы датчика 17 пропорциональны суммарному отклонению Д i - & звена 13 относительно звена 12 и звена 14 относительно звена 13, Суммированиедостигается за счет использования механизма пантографа, выполненного на базе звеньев 13 и 14. Исполнительный орган содержит последовательность шарнирно соединенных зве- ньев 19, 20 и 21, связывающих шарнир 22 подвеса запястья исполнительного органа с основанием 11, а также приводы23, 24 и 25, потенциометрические синусно-косинусные датчики 26, 27 и 28 углов между звеньями и потенциометрические датчики 29, ЗО и 31 этих углов. Конструктивно каждая пара датчиков 26 и 29, 27 и ЗО, 28 и 31 и щарниры, в которых они установлены, идентичны друг другу. Обмотки датчиков 28 и 31, расположенных в шарнире между звеньями 19 и 2О (фиг, 3), смонтированы на общем корпусе 32, установленжум с возможностью перемещения относительно зве- ньве 19 и 2О и связанном со звеном 19 упругим элементом 33 и демпфером 34. Движок 35 потенциометра 31 укреплен на звене 19, а движки 36 и 37 потенциометра 28 - на звене 2О. На звене 20 установлен управляемый от ключа тормоз 38, фиксирующий корпус 32 датчиков относительно звена 2О. В отличие от . задающего органа, перемещения звеньев исполнительного органа могут быть значительными. Для описанной кинематической схемы задающего и исполнительного органов манипулятора условия векторов малых отклонений шарнира 15 от исходного положения и шарнира 22 от некоторого произвольно-, го положения, определяемого углами между смежными звеньями исполнительного органа, тфиводят к соотношениям о- Ksitf f ) ,)(uye,gtn у k aPrcodq Sin fa -t,(f,). Aif/Acw}J cwrt - iP)J - /rs/wj )) К SiH fi де К отношение длины звена к длине звена 21 j - программные-значения изменения соответствующих углов исполнительного органа; «й отклонения, задаваемые оператором. Счетно-решаюший блок 6 реализует вычисления в соответствии с этими соотношениями. Манипулятор работает в двух режимах: в режиме астатического управления и в режиме позиционного управления. При астатическом управлении оператор с помощью ключа 7 соединяет блок 8 памяти с датчиком 26, 27, 28 положения звеньев 19, 20 и 21 исполнительного органа 12. При этом в процессе движения информация в блоке 8 памяти изменяется и поступает в счетно-решающий блок 6, где в соответствии с информацией о положении задающего органа 1, . с информацией о требуемом направлении перемещения конечного звена исполнительного органа 2, происходит расчет тсебуемых изменений углов-между звеньями 19, 20 и 21. На входы первого блока 9 сравнения в этом случае поступа1от одинаковые сиг- налы, поэтому на его выходе нулевой сигнал, и второй блок сравнения 1О пропускает на приводы 23, 24 и 25 сигналы, вы работанные счетно-решающим блоком 6, не изменяя их. Перемещения 19, 2О, 21 исполнительного органа 2 осущест вляются со скоростями, пропорциональными значениям ДУ ,/51 , А Ч Эти перемещения происходят до тех пор, пока имеются отклонения звеньев 12, 13 и 14 задающего органа от исходного положения. Вектор скорости перемещенияза- пястья исполнительного органа 2 коллинеарен вектору отклонения запястья зад ющего органа 1 от его исходного попожения. Работа в астатическом режиме позволяет вывести запястье исполнительного органа 2 в любую зону рабочего объема и остановить efx). В момент остановки задающий орган 1 находится в исходном состо янии, а исполнительный 2 - в некотором произвольном. Позиционное управление позволяет осуществить тонкие, точные операции с малы ми перемещениями. Переходя на поаицион74385 10 15 20 16 jHoe управление, оператор с помощью ключа 7 размыкает связь между датчиками положения 26, 27 и 28 звеньев 19, 20 и 21 задающего органа 2 и блоком 8 памяти. При этом в блоке 8 памяти запоминаются значеим углов между звеньями 21 и 2О, 19 и 20, 19 и 21 исполнительного органа 2, имевшие место в момент перехода с астатического управленияг на позиционное. Эта информацияпоступает в счетно-решающий блок бив первый блок 9 сравнения, В прсщессе движения на второй вход перв.ого блока 9 сравнения поступает информация о Действительных положе- ниях звеньев 19, 2О, 21 исполнительного органа 2, а с его выхода на вход второго блока Ю сравнения поступает информация io6 о-йотбненнях звеньев 19, 2О, 21 от положений, которые они занимали в момент переключения управления. По-прежнему в счетно-решающем блоке 6 в соответствии с информацией о положении задающего органа 1 вырабатываются программные значения отклонений звеньев 19, 2О, 21 исполнительного органа 2 от положений, которые они занимали в момент переключений управлений, эти значения сравниваются затем во втором блоке 1О сравнения с их действительными отклонениями, а нх разность поступает на приводы 24 и 25. Приводы 23, 2.4 и 25 в соответствии с поступающими управляющими сигналами изменяют относительные положения звеньев 21 и 2О, 19 и 2 О, 19 и 21 исполнительного органа 2, обеспечивая равенство задаваемых и отрабатываемых снгналов и, в конечном счете, равенство векторов перемещений запястий задающего 1 и исполнительного 2 органов. В описываемой конструкции элементы блока 8 памяти и первого блока 9 сравнения сосредоточены в конструктивно идентичных шарнирах исполнительного органа 2. Шарнир, связывающий звенья 19 и 2О, показан на фиг, 3, Элементами блока 8 памяти, смонтированными в этом шарнире, являются потенциометрические датчики 28 синуса и косинуса угла между звеньями 19 и 20, а элементом первого .блока 9 сравнения служит потенаиометри- чески и датчик 31 положения. При астатическом управлении тормоз 38 отключен. При относительном переме шении звеньев 19 и 2О исполнительного органа 2 корпус 32 потенциометров 28 и 31 перемещается, увлекаемый упругим элементом 33 и демпфером 34. При астатйческом управлении сигнал датчика 31 положения не изменяется и равен нулю, а, сигналы синусно-косинуснохчэ датчика 28, снимаемые с движков 36 и 37, поступают в счетно-решающий блок 6. fipE позиционном управлении тормоз 3 8 выключен. Тем самым фшссируются значения сигналов о синусах и косинусах углов меж ду звеньями 19 и 2О в момент переключения режима управления, поступающих в счетно-решающий блок, а сигналы потенциометрического датчика 31 положения по ступают во второй блок сравнения, соотвеТ ствуя величине отклонения звеньев 1Э и 2О от состояний, имевших место в момент переключения режима. Манипулятор позволяет повысить произ Бодительность труда при проведении опера ций, требующих высокой точности движений в условиях стесненности рабочего про странства оператора. Формула изобретения Манипулятор, содержащий задающий к исполнительный органы с датчиками поло ения, приводы, соединенные с исполни4
-Х тельным органом, счетно-решающий блок, к первому входу которого подключеньт дат чики положения задающего органа, от личающийся тем, что , с целью повышения точности локальных перемещений при малом объеме рабочего пространства задающего органа, он содержит последовательно соединенные ключ, блок памяти, первый и второй блоки сравнения, причем выход второго блока сравнения подключен к приводам исполнительного органа, выход датчиков положения исполнитель ного органа подключен к первому входу первого блока сравнения и входу ключа, выход блока памяти соединен со вторым входом счетно-рещающего блока и вторым входом первого блока сравнения, выход которого подключен к первому входу второго блока сравнения, а выход счетно-решающего блока подключен ко второму входу второго блока сравнения. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3.280,991, кл, 214-1, опублик. 1966. 2.Авторское свидетельство СССР № 271252, кл. В 25 J 3/О4, 1969.
en
a
0iJ3.5
