Изобретение относится к машиностроении; и может быть использовано д,;1я прецизионного перемещения виброизолированных рабочих органов микроманипуляторов.
Це;И) из(яЗретения -- повышение точности в работе устройства за счет уменьшения взаимного влияния перемещаемых рабочих органов.
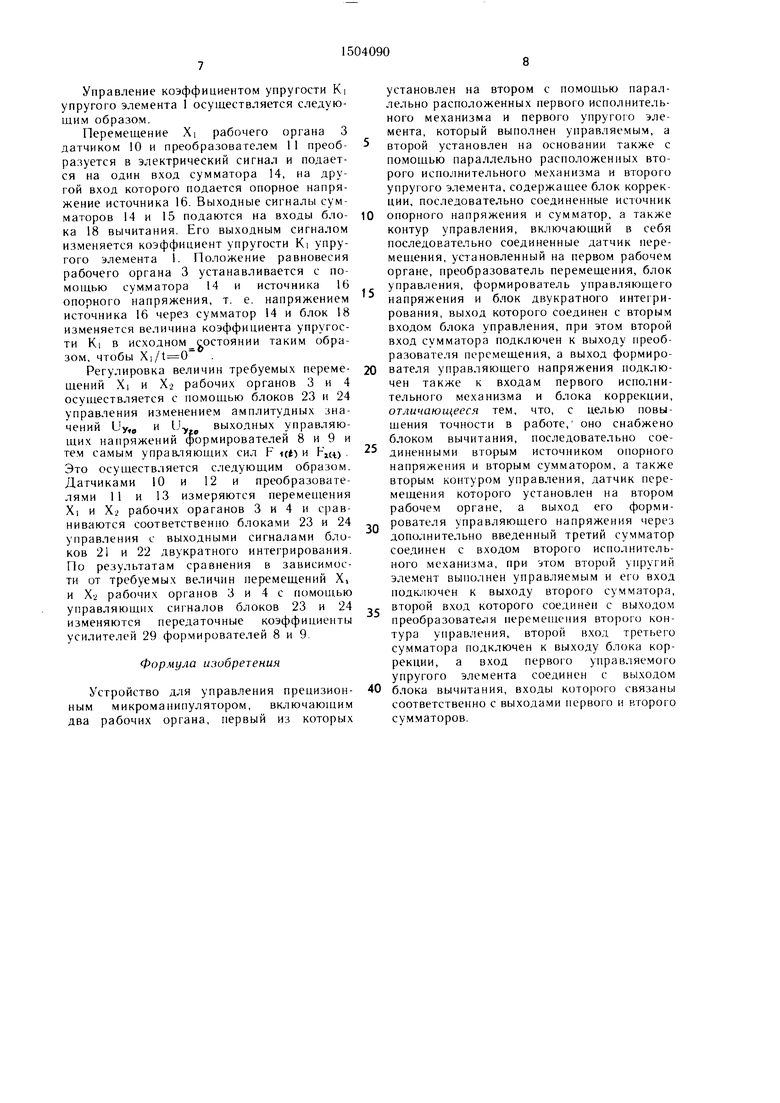
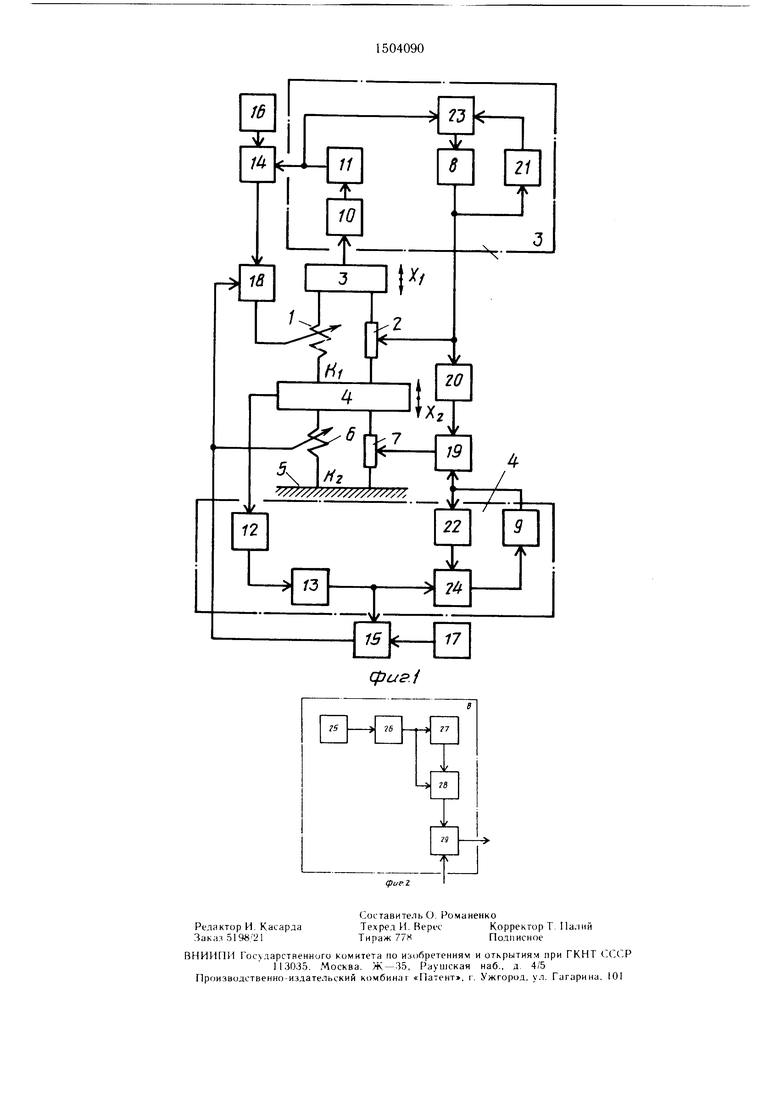
На фи1. I изображена фу 1К 1иональная схе.ма устройства; на фиг. 2 - схема формирователя упр.чвляющего напряжения. Устройство содержит парал. кмьно установленные первый упругий элемент I с уп- рав. шемым коэффициентом упругости Л | и первый исполнительный механизм 2, расположенные между перемещаемыми первым и вторым рабочи.ми органами 3 и 4 соответственно. Рабочий орган 4 связан с основанием 5 через па)аллельно установленные BTojion упругий элемент 6 с управляемым коэффициентом упругости / и второй исполнительный механизм 7. Кроме того, в состав устройства входят формирователи 8 и 9 управляющего напряжения, датчик
10перемещения, установленный на рабочем органе 3 и связанный с преобразователем
11перемещения, датчик 12 перемещения, установленный на рабочем органе 4 и связанный с преобразователем 13 перемещения, первьп и второй с мматоры 14 и 15. первый и второй источники 16 и 17 опорного напряжения, блок 18 вычитания, трети(1 сумматор 19, блок 20 коррекции с коэффиСП
о
4
О
;о
циентом 1,
равным соотнощению in
рабочего органа 3 и т - рабочего органа 4, блоки 21 и 22 двукратного интегрирования и блоки 23 и 24 управления.
При этом датчик 10 перемещения через преобразователь 11 и сумматор 14, другой вход которого подключен к источнику 16 опорного напряжения, подключен к одному входу блока 18 вычитания. Датчик 12 перемещения через преобразователь 13 и сумматор 15, другой вход которого подключен к источнику 17 опорного напряжения, подключен к второму входу блока 18 вычитания, выход которого подключен к управляющему входу управляемого упругого элемента 1.
Выход формирователя 8 подключен к уп- равляюпаему входу исполнительного механизма 2, а также через блок 20 коррекции - к одному входу сумматора 19 и через блок 21 двукратного интегрирования - к одному входу блока 23 управления. Выход формирователя 9 управляющего напряжения подключен к второму входу сумматора 19, выходом подключенного к управляющему входу исполнительного механизма 7, и через блок 22 двукратного интегрирования - к одному входу блока 24 управления. Кроме того, выход преобразователя 11 подключен к второму входу блока 23 управления, выходом подключенного к управляющему входу формирователя 8, а выход преобразователя 13 подключен к второму входу блока 24 управления, выходом подключенного к управляющему входу формирователя 9.
Датчики 10 и 12, преобразователи 1 1 и 13, блоки 21-24, формирователи 8 и 9 образуют соответствующие контуры управления рабочими органами. Формирователь 8 (и 9) может быть выполнен, например, в виде (фиг. 2) последовательно подключенных блока 25 запуска, ждуп1его мультивибратора 26, генератора 27 гармонических колебаний, ключа 28 и управляемого усилителя 29. Кроме того, выход ждущего мультивибратора 26 подключен также к второму входу ключа 28.
Устройство работает следующим образом.
Движения рабочих органов 3 и 4 будут стабильными, если при воздействии сил fi, и Fyi , их ускорения Х ц,) и A ai/i в начале и конце движения равны нулю. Перемещения А | и Л 2 рабочих органов 3 и 4 будут близкими к оптимальным по быстродействию и они вполне удовлетворяют условиям стабильности перемеп1ений, если при воздействии управляющих сил fu,) ния рабочих органов 3 и 4 ся по следующим законам О
и F-2(,) ускоре- осупкч твляютя -р
. 2п, ittSin t J1
при при цри ,
4. О
Xmsin- t г
О
(2)
при при 0 «7 2; при ,
где Х 2о и Л ю- амплитудные значения ускорений соответственно рабочего органа 4 и упругосвязан- ного с ним рабочего органа 3; 7:2 и Т - время перемещений рабочих органов 4 и 3.
Так как при постоянной массе рабочих органов управляющая сила пропорциональна ускорению рабочего органа, т. е. f(() m-X , где ш - масса рабочего органа, то для достижения законов (1) и (2) законы изменения сил, управляющих перемещениями упругосвязанных рабочих органов, должны быть
О
Ш)
(3)
35
при при при ,
40
f., О
(4)
при при
45
при ).; где f 1(1 mi
Л ю и f20 2-А 20.
С помощью формирователей 8 и 9 формируют управляющие напряжения О
1Л
при , при при
Г
о
,ios/n -/
J1
(5)
0
,, . 2л. L/,iosin- /
(&)
при при
при ,
где fuiii и Ua-io -- амплитудные значения уп- равляюних напряжений; Г| и 72 - длительности периода сигнала управления.
Формирователь 8 работает следующим образом.
Сигналом блока 25 запускается ждущий мультивибратор 26, который вырабатывает один прямоугольный импульс длительностью Т. Последний запускает генератор 27 гармонических колебаний. Период гармонических колебаний равен длительности Т. При окончании импульса мультивибратора 26 колебания генератора 27 затухают. Далее колебания генератора 27 подаются на один вход ключа 28. на другой вход которого подается импульс ждущего мультивибратора 26. Ключ 28 открывается только на время, равное длительности импульса Т. Таким образом, на выходе ключа 28 формируется сигнал «Одной синусоиды, который подается на вход управляемого усилителя 29.
Управляющее напряжение (выражение 5) формирователя 8 подают на управляющий вход исполнительного механизма 2, который формирует управляюп1ую силу (выражение 3), создаюп1ую соответствуюпюе ускорение рабочего органа 3. Таким образом, получают F(t), где К - линейный коэффициент преобразования исполнительного механизма 2. Далее управляющее напряжение формирователя 8 подают на вход блока 21 двукратного интегрирования, на выходе которого получается сигнал, который можно представить в виде О
U.
/ т; . 2л, I ,, Т-, . f .s-m-y-fL-yiog; / , (7)
О
при при 0- / :7 |;
при .
Как видно, управляющее напряжение формировате.пя 8 пропорционально ускорению А | перемещаемого рабочего органа 3,
I i Г-п
т. е. (7,,rr-Ai. Поэтому выходное напряжение б.чок;) 21 двухкратного интегрирования пропорционально перемещению AI рабочего органа 3, т. е. L ,i A ,,A i, где К,, линейный коэффициент преобразования и блока 21. С другой стороны, перемещение
А| рабочего органа 3 преобразуется датчиком 10 и преобразователем 11 в электрический сигнал, равный Uvi К-х, Xi, где Л х, - линейный коэффициент преобразования датчика 10 и преобразователя 11.
Для исключения влияния перемещения
рабочего органа 3 на точность перемещения рабочего органа 4 управляющее напряжение формирователя 8 блоком 20 коррекции умножают на соотнон1ение и суммируют в сумматоре 19 с управляющим напряжением формирователя 9, а результат суммирования подают на управляющий вход исполнительного механизма 7. Последний формирует унравляюп1ую силу (выра жение 4), создающую соответствующее ускорение (выражение 2). Таким образом,
р,,(( . I y где KF - линейный коэффициент преобразования исполнительного механизма 7. Далее управляющее напряжение формирователя 9 двукратно интегрируют блоком 22. Результат интегрирования имеет вид
- {
-I
Уг.
(J) + ,(3)
гл
т.
при при 0 t ::Tj; при . ,
Так как управляющее напряжение формирователя 9 пропорционально ускорению Xj перемещаемого рабочего органа 4, т. е.
5
0
. -..
то выходное напряжение
блока 22 двукратного интегрирования пропорционально перемеп1ению .4 рабочего органа 4, т. е. Uu KuX, где К« - лнней- ный коэффициент преобразования б.юка 22. С другой стороны, перемещение Х:. рабоС чего органа 4 преобразуется датчиком 12 и преобразователем 13 в электрический сигнал, равный и- K)), где К - линейный коэффициент гфеобразования датчика 12 и п)еобразователя 13.
Для сохранении положения равновесия
5 рабочих органов 3 и 4 при их перемещении необходимо изменять коэффициенты упругости К| и Кз упругих элементов 1 и 6 одновременно с изменением перемещений Х и XL). Для этого датчиком 12 и преобразователем 13 перемеихение Х: преобразуют в электрический сигнал и после сложения его с опорным напряжением источника 17 изменяют коэффициент упругости К2 элемента 6. Сумматор 15 с источником 17 опорного напряжения необ5 ходим для регулировки положения равновесия рабочего органа 4 в исходном состоянии, т. е. для задания такого Кз, при котором .
Управление коэффициентом упругости Ki упругого элемента 1 осуществляется следующим образом.
Перемещение Xi рабочего органа 3 датчиком 10 и преобразователем 11 преобразуется в электрический сигнал и подается на один вход сумматора 14, на другой вход которого подается опорное напряжение источника 16. Выходные сигналы сумматоров 14 и 15 подаются на входы блока 18 вычитания. Его выходным сигналом изменяется коэффициент упругости Ki упругого элемента 1. Положение равновесия рабочего органа 3 устанавливается с помощью сумматора 14 и источника 16 опорного напряжения, т. е. напряжением источника 16 через сумматор 14 и блок 18 изменяется величина коэффициента упругости К| в исходном состоянии таким образом, чтобы
Регулировка величин требуемых перемещений Х| и Х2 рабочих органов 3 и 4 осуществляется с помощью блоков 23 и 24 управления изменением амплитудных значений Uy,e и U-y выходных управляющих напряжений формирователей 8 и 9 и тем самым управляющих сил F (t) и F) . Это осуществляется следующим образом. Датчиками 10 и 12 и преобразователями 11 и 13 измеряются перемещения Xi и Х-2 рабочих ораганов 3 и 4 и сравниваются соответственно блоками 23 и 24 управления с выходными сигналами блоков 21 и 22 двукратного интегрирования. По результатам сравнения в зависимости от требуемых величин перемещений X, и Х рабочих органов 3 и 4 с помощью управляющих сигналов блоков 23 и 24 изменяются передаточные коэффициенты усилителей 29 формирователей 8 и 9.
Формула изобретения
Устройство для управления прецизионным микроманипулятором, включающим два рабочих органа, первый из которых
установлен на втором с помощью параллельно расположенных первого исполнительного механизма и первого упругою элемента, который выполнен управляемым, а
второй установлен на основании также с помощью параллельно расположенных второго исполнительного механизма и второго упругого эле.мента, содержащее блок коррекции, последовательно соединенные источник
опорного напряжения и сумматор, а также контур управления, включающий в себя последовательно соединенные датчик перемещения, установленный на первом рабочем органе, преобразователь перемещения, блок
управления, формирователь управляющего
напряжения и блок двукратного интегрирования, выход которого соединен с вторым входом блока управления, при этом второй вход сумматора подключен к выходу преобразователя перемещения, а выход формирователя управляющего напряжения подключен также к входам первого исполнительного механизма и блока коррекции, отличающееся тем, что, с целью повы- щения точности в работе, оно снабжено блоком вычитания, последовательно соединенными вторым источником опорного напряжения и вторым сумматором, а также вторым контуром управления, датчик перемещения которого установлен на втором рабочем органе, а выход его формирователя управляющего напряжения через дополнительно введенный третий сумматор соединен с входом второго исполнительного механизма, при этом второй упругий элемент выполнен управляемым и его вход подключен к выходу второго сумматора,
второй вход которого соединен с выходом преобразовате ;1я перемещения второго контура управления, второй вход третьего сумматора подключен к выходу блока коррекции, а вход первого управляемого упругого элемента соединен с выходом
блока вычитания, входы которого связаны соответственно с выходами первого и второго сумматоров.
77
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления микроманипулятором | 1986 |
|
SU1445942A1 |
| Система автоматического регулирования турбины | 1982 |
|
SU1060797A1 |
| Система для программного управления | 1989 |
|
SU1675847A1 |
| Устройство коррекции скорости охлаждения горячекатаной полосы | 1980 |
|
SU900296A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Система регулирования турбины | 1985 |
|
SU1295012A1 |
| МИКРОПОЗИЦИОННЫЙ ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2008 |
|
RU2350009C1 |
| Способ управления манипулятором | 1985 |
|
SU1321579A1 |
| Программное задающее устройство | 1977 |
|
SU736048A1 |
| ЭЛЕКТРОПРИВОД ПОДЪЕМНО-ТРАНСПОРТНЫХ МАШИН | 2010 |
|
RU2432664C2 |
Изобретение относится к машиностроению и может быть использовано для прецизионного перемещения виброизолированных рабочих органов микроманипуляторов. Целью изобретения является повышение точности работы устройства. Для этого в устройство, содержащее контур управления перемещениями первого рабочего органа, блок коррекции, а также последовательно соединенные сумматор и источник опорного напряжения, введены контур управления вторым рабочим органом, на котором расположен первый рабочий орган, блок вычитания, последовательно соединенные второй источник опорного напряжения и второй сумматор, а также третий сумматор. Для исключения взаимного влияния перемещаемых рабочих органов управляющий сигнал первого исполнительного механизма через блок коррекции и третий сумматор подается на второй исполнительный механизм, а управляющий сигнал первого управляемого упругого элемента формируется в виде разности управляющего сигнала второго управляемого упругого элемента и соответствующего сигнала, пропорционального перемещениям первого рабочего органа. 2 ил.
cpaaf
(риг г
| Способ управления микроманипулятором | 1986 |
|
SU1445942A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
