Изобретение относится к микроэлектронике и может быть использовано для формирования на подложке топологического тонкопленочного металлического рисунка гибридной микросхемы, напыляемого в вакууме через маску.
Известно устройство для напыления в вакууме через маску тонких слоев многослойных изделий по патенту РФ №2063473 от 10.07.1996. Недостатком известного устройства является низкая производительность из-за необходимости разгерметизации вакуумного объема для смены маски.
Наиболее близким аналогом, принятым за прототип предлагаемой установки, является устройство для напыления в вакууме топологического тонкопленочного рисунка гибридной микросхемы на подложку, прижатую к маске, патент РФ №2432417 от 27.10.2011 г.
Недостатком прототипа также является низкая производительность процесса напыления из-за необходимости разгерметизации вакуумного объема для смены маски. Объясняется это следующим. Топологический тонкопленочный металлический рисунок гибридной микросхемы содержит пересекающиеся элементы из разных металлов, напыляемые на подложку, например, поликоровую. Следовательно, необходимо после напыления в вакууме через прецизионно изготовленную маску первого топологического рисунка (например - резистивных слоев) остановить процесс, разгерметизировать установку вакуумного напыления, заменить маску (на маску с другим рисунком) и провести второе напыление (например - проводниковых слоев), другим металлом через вторую маску. Следует отметить, как первый, так и второй рисунок топологии может состоять из нескольких слоев различных металлов. Таким образом, для смены маски требуется большое время:
- на разгерметизацию вакуумной установки;
- на повторный вывод вакуумной установки на режим напыления (откачка атмосферного воздуха до нужного давления, подогрев подложки и т.д.).
Другим недостатком является то, что во время смены маски, изготавливаемое изделие находится вне вакуумной установки, где на нее неизбежно влияет, окружающая ее, воздушная среда (влажность, мелкие пылинки и т.п.), что снижает качество напыляемого слоя. Задача изобретения - обеспечить в установке для напыления в вакууме топологического тонкопленочного рисунка гибридной микросхемы на подложку возможность смены масок в условиях вакуума.
Технический результат - существенное (скачкообразное) повышение производительности установки и повышение качества напыляемого рисунка.
Сущность изобретения заключается в следующем. Установка для напыления в вакууме топологического тонкопленочного рисунка гибридной микросхемы на подложку, установленную в подложкодержателе, содержит первую вакуумную камеру с первым источником металла и первым маскодержателем с первой маской. Отличительные признаки состоят в том, что в нее введены, по крайней мере, вторая вакуумная камера со вторым источником металла и вторым маскодержателем со второй маской, отличной от первой, транспортная вакуумная камера, сообщающаяся с вакуумными камерами через соответствующие первый и второй вакуумные затворы, манипулятор, установленный в транспортной камере, с возможностью обеспечения захвата и перемещения подложкодержателя с подложкой между камерами и установки его на маскодержатель с маской.
Кроме того, установка содержит шлюзовую вакуумную камеру загрузки-выгрузки подложкодержателя с подложкой, сообщающуюся с транспортной камерой через третий вакуумный затвор, через который подложкодержатель доступен для захвата манипулятором.
Изобретательский уровень решения состоит в качественно новом свойстве предлагаемой установки - в возможности напыления в вакууме топологического тонкопленочного рисунка гибридной микросхемы на подложку через маски, сменяемые в условиях вакуума, то есть без необходимости операции сбрасывания вакуума. Такое техническое решение обеспечивает скачкообразное повышение производительности предлагаемой установки.
Сущность изобретения поясняется чертежами.
На фиг. 1 показана схема установки для напыления в вакууме топологического тонкопленочного рисунка гибридной микросхемы на подложку, вид сверху.
На фиг. 2 показана схема взаимного расположения подложкодержателя, подложки и маски.
На фиг. 3 показана схема установки подложкодержателя с подложкой на маску.
Установка содержит (фиг. 1), по крайней мере, две технологические вакуумные камеры 1 и 2 для напыления, ограничивающие рабочие зоны напыления. Технологические вакуумные камеры 1 и 2 соединены через вакуумные затворы, (например, пневмозатворы ДУ300) 4 и 5 с транспортной вакуумной камерой 3, ограничивающей транспортную зону. Таким образом, технологические вакуумные камеры 1 и 2 могут сообщаться между собой через транспортную вакуумную камеру 3. К транспортной вакуумной камере 3 через вакуумный затвор 6 может быть подсоединена шлюзовая вакуумная камера загрузки-выгрузки 7. В технологических вакуумных камерах 1 и 2 расположены маскодержатели 13 из немагнитного материала, (например - титана), выполненные, например, в виде карусельных устройств с масками 8 (фиг. 2) из тонкого магнитного материала (например - стали), источники испарения металлов (не показаны) и т.д. Технологические вакуумные камеры 1 и 2 имеют технологические двери 9 и 19 для технического обслуживания и ввода расходных материалов - напыляемых металлов. Через технологические двери 9 и 19 может осуществляться загрузка и выгрузка подложек 12 в подложкодержателях 11 (фиг. 2).
В транспортной вакуумной камере 3 расположен роботизированный захват -манипулятор 10, например, автоматизированная транспортная система перемещения подложкодержателей (манипулятор производства UHV Design, Великобритания).
В шлюзовой вакуумной камере загрузки-выгрузки 7 в общем случае расположены подложкодержатели 11, выполненные из немагнитного материала (например, титана) с вставками - электромагнитами 15, как с не напыленными, так и с напыленными подложками 12.
Перед напылением (фиг. 2) в рабочей камере 1 (например - напыление резистивных слоев), а после этого 2 (например - напыление проводниковых слоев) подложкодержатель 11 с подложкой 12 плотно прижат к маске 8 (подложка 12 может быть одна или несколько, в зависимости от конструкции подложко держателя и производительности камеры).
Прецизионное позиционирование (фиг. 2 и 3) подложки 12 в подложкодержателе 11 относительно рисунка топологии на маске 8, изготовленной из тонкого магнитного материала, обеспечивается с помощью, изготовленных с высокой точностью, направляющих элементов 14, например, в виде стержней и конусов, смонтированных на маскодержателе 13. Плотный прижим маски 8 к подложке 12 в подложкодержателе 11 обеспечивается с помощью вставок-электромагнитов 15, которые установлены по периметру и в центре подложкодержателя 11. Питание на электромагниты 15 подается через ось вращения 16 подложкодержателя 11 в технологической вакуумной камере 1 и 2. Подложки 12 в подложкодерателе 11 устанавливаются через термокомпенсирующие пружины 17, чтобы избежать повреждения вовремя их термического расширения при предварительном прогреве. Подложки 12 подпружинены с нерабочей стороны и удерживаются, например, «лапками» (не показано) с рабочей стороны для того, чтобы обеспечивалось их выступание из подложкодерателя 11. Это необходимо для плотного прижима к ним маски 12. Подложкодератель 11 имеет в верхней части выступающую деталь 18, за которую происходит его захват манипулятором 10 для перемещения между камерами.
Работа установки без использования шлюзовой вакуумной камеры загрузки-выгрузки 7 происходит следующим образом. Через технологическую дверь 9 технологической вакуумной камеры 1 на маскодержатель 13 с предварительно установленной маской 8 устанавливается подложкодератель 11 с установленной в него подложкой 12.
Далее технологическую дверь 9 технологической вакуумной камеры 1 и вакуумные затворы 4 и 5 герметично закрывают. В технологической вакуумной камере 1, технологической вакуумной камере 2 и транспортной вакуумной камере 3 создают необходимый вакуум, после чего производят напыление на подложке 12 первого рисунка через первую маску 8.
После окончания напыления в технологической вакуумной камере 1 первого рисунка открывают вакуумные затворы 4 и 5.
Подложкодератель 11 с подложкой 12 с помощью манипулятора 10 отсоединяют от маски 8 и переносят через открытый вакуумный затвор 4, транспортную вакуумную камеру 3, открытый вакуумный затвор 5 в технологическую вакуумную камеру 2.
Вакуумный затвор 4 закрывают, сбрасывают вакуум в технологической вакуумной камере 1, после чего в нее снова загружают через технологическую дверь 9 следующий подложкодержатель 11 с подложкой 12, подлежащей напылению, закрывают технологическую дверь 9, создают в технологической вакуумной камере 1 необходимый вакуум и производят очередное напыление. В это же время в технологической вакуумной камере 2 подложку 12 в подложкодержателе 11 позиционируют относительно второй маски 8 с помощью направляющих элементов 14, после чего прижимают к ней с помощью вставок-электромагнитов 15. Закрывают вакуумный затвор 5. В технологической вакуумной камере 2 производят второе напыление подложки 12 через вторую маску 8. После напыления в технологической вакуумной камере 2 сбрасывают вакуум и через технологическую дверь 19 извлекают готовую, напыленную последовательно через две разные маски, подложку. Затем технологическую дверь 19 закрывают и создают необходимый вакуум в технологической вакуумной камере 2, после чего она снова готова к приему прошедших первое напыление через первые маски 8 подложек из технологической вакуумной камеры 1.
С целью дальнейшего увеличения производительности установки для напыления и повышения качества напыления подложек процесс загрузки и выгрузки возможно реализовать без необходимости разгерметизации вакуумного пространства технологических вакуумных камер 1 и 2. Это достигается путем подсоединения к транспортной вакуумной камере 3, через вауумный затвор 6, шлюзовой загрузочно-разгрузочной вакуумной камеры 7 (фиг. 1). Через открытую технологическую дверь 20 шлюзовой загрузочно-разгрузочной камеры 7 устанавливают первый подложкодержатель 11 с первой подложкой 12, затем технологическую дверь 20 шлюзовой загрузочно-разгрузочной вакуумной камеры 7 закрывают, после чего в ней создают форвакуум. Одновременно с этим (или заранее) в технологической вакуумной камере 1, технологической вакуумной камере 2 и транспортной вакуумной камере 3 отдельно в каждой, так как технологическая вакуумная камера 1 и 2 предварительно перекрываются от транспортной вакуумной камеры 3 вакуумными затворами 4 и 5, создается высокий вакуум общим форвакуумным и отдельными высоковакуумными насосами (не показаны). Далее вакуумный затвор 6 шлюзовой загрузочно-разгрузочной вакуумной камеры 7 открывают и манипулятор 10 перемещает в вакууме первый подложкодержатель 11 с первой подложкой 12 в транспортную вакуумную камеру 3, после чего вакуумный затвор 6 перекрывают, в шлюзовой загрузочно-разгрузочной вакуумной камере 7 сбрасывают вакуум, затем в загрузочно-разгрузочной камере 7 открывают технологическую дверь 20 для загрузки второго подложкодержателя 11 со второй подложкой 12. Одновременно с этим вакуумный затвор 4 между транспортной вакуумной камерой 3 и технологической вакуумной камерой 1 открывают, манипулятор 10 перемещает первый подложкодержатель 11 с первой подложкой 12 в технологическую вакуумную камеру 1 и возвращается в исходное положение - в транспортную вакуумную камеру 3. В технологической вакуумной камере 1 первая подложка 12 в первом подложко держателе 11 позиционируется с помощью направляющих элементов 14 с первой маской 8, а затем фиксируется и прижимается к первой маске 8 с помощью вставок-электромагнитов 15, далее технологическая вакуумная камера 1 перекрывается от транспортной вакуумной камеры 3 вакуумным затвором 4, в технологической вакуумной камере 1 создают необходимый для напыления высокий вакуум, и производят напыление первой подложки 12 через первую маску 8. После напыления первой подложки 12 через первую маску 8 в первой технологической вакуумной камере 1 манипулятор 10 отделяет первый подложкодержатель 11 с первой подложкой 12 от первой маски 8 и перемещает его через открывшиеся вакуумные затворы 4 и 5 из технологической вакуумной камеры 1 через транспортную вакуумную камеру 3 в технологическую вакуумную камеру 2, где операция напыления подложки повторяется, но уже через вторую маску 8, по рисунку, отличную от первой. Во время процесса напыления в технологической вакуумной камере 2 манипулятор 10, находящейся на тот момент исходном положении (исходное положение - это любое положение в транспортной вакуумной камере 3 без подложкодержателя 11), забирает уже загруженный второй подложкодержатель 11 со второй подложкой 12 из шлюзовой загрузочно-разгрузочной вакуумной камеры 7 и переносит его в технологическую вакуумную камеру 1, где происходит совмещение второй подложки 12 с помощью направляющих элементов 14 с первой маской 8 и прижим с помощью вставок-электромагнитов 15, а затем напыление на вторую подложку 12 тонкой пленки металла через первую маску 8. Таким образом, в данный момент в установке находятся в работе одновременно две подложки 12.
После окончания процесса напыления в технологической вакуумной камере 2 манипулятор 10 через открывшиеся вакуумные затворы 5 и 6 технологической вакуумной камеры 2 и шлюзовой загрузочно-разгрузочной вакуумной камеры 7 перемещает первый подложкодержатель 11 с напыленной через вторую маску 8 первой подложкой 12 в шлюзовую загрузочно-разгрузочную вакуумную камеру 7. Затем вакуумный затвор 6 закрывают и в шлюзовой загрузочно-разгрузочной вакуумной камере 7 сбрасывают вакуум. Далее оператор забирает из шлюзовой загрузочно-разгрузочной вакуумной камеры 7 первый подложкодержатель 11 с готовой напыленной первой подложкой 12 и размещает очередной подложкодержатель 11 с очередной не напыленной подложкой 12.
После этого манипулятор 10 перемещает из технологической вакуумной камеры 1 второй подложкодержатель 11 со второй подложкой 12, на которую нанесен первый топологический рисунок, с помощью первой маски 8, через вакуумные затворы 4 и 5 и транспортную вакуумную камеру 3 в технологическую вакуумную камеру 2, где второй подложкодержатель 11 со второй подложкой 12 позиционируется со второй маской 8 по направляющим элементам 14. Вторая подложка 12 прижимается ко второй маске 8 с помощью вставок-электромагнитов 15. Далее, вакуумный затвор 5 перекрывают и производят напыление на второй подложке 12 второго топологического рисунка через вторую маску 8 во второй технологической вакуумной камере 2. Одновременно с этим манипулятор 10 забирает из шлюзовой загрузочно-разгрузочной вакуумной камеры 7 третий подложкодержатель 11 с еще не напыленной третьей подложкой 12 и переносит его в технологическую вакуумную камеру 1, где третья подложка 12 позиционируются по направляющим 14 и прижимаются с помощью вставок-электромагнитов 15 к первой маске 8, аналогично описанному ранее, после чего происходит очередное напыление в технологической вакуумной камере 1.
Таким образом, оператор, забирая подложкодержатель 11 с напыленной подложкой из шлюзовой загрузочно-разгрузочной вакуумной камеры 7 через технологическую дверь 20, устанавливает на его место следующий подложкодержатель 11 с подложкой 12 и цикл повторяется.
Следует отметить, что в данном конвейерном принципе работы, имеет место некоторая потеря высокого вакуума через шлюзовую загрузочно-разгрузочную вакуумную камеру 7 во время загрузки и выгрузки подложкодержателя 11 с подложкой 12. Поэтому во время работы в технологических вакуумных камерах 1 и 2 и транспортной вакуумной камере 3 давление постоянно контролируется и откачивается по мере необходимости. Кроме того, во время производства периодически заканчивается испаряемый металл в технологических вакуумных камерах 1 и 2. В этом случае материал добавляют через технологические двери 9 и 19 технологических вакуумных камер 1 и 2, предварительно закрыв соответствующие вакуумные затворы и сбросив вакуум.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАПЫЛЕНИЯ В ВАКУУМЕ ТОПОЛОГИЧЕСКОГО ТОНКОПЛЁНОЧНОГО РИСУНКА ГИБРИДНОЙ МИКРОСХЕМЫ НА ПОДЛОЖКУ | 2014 |
|
RU2586937C1 |
| ВАКУУМНАЯ УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ | 2008 |
|
RU2471015C2 |
| Вакуумный перегрузчик | 1986 |
|
SU1321980A1 |
| СПОСОБ НАНЕСЕНИЯ ТОНКОПЛЕНОЧНЫХ ПОКРЫТИЙ И ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2507308C1 |
| Поворотный контейнер подложки с "маской" для формирования тонких пленок различной конфигурации | 2022 |
|
RU2794157C1 |
| СПОСОБ ПРОВЕДЕНИЯ ТРАФАРЕТНОЙ РЕНТГЕНОВСКОЙ ЛИТОГРАФИИ | 2007 |
|
RU2344453C1 |
| ВАКУУМНАЯ НАПЫЛИТЕЛЬНАЯ УСТАНОВКА | 1971 |
|
SU322421A1 |
| ЛИТОГРАФИЧЕСКАЯ МАСКА ДЛЯ LIGA-ТЕХНОЛОГИИ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2007 |
|
RU2350995C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОУРОВНЕВЫХ ТОНКОПЛЕНОЧНЫХ МИКРОСХЕМ | 2004 |
|
RU2264676C1 |
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |

Изобретение относится к микроэлектронике, в частности к установке для напыления в вакууме топологического тонкоплёночного рисунка гибридной микросхемы на подложку. Технический результат - повышение производительности установки и повышение качества напыляемого рисунка. Установка содержит первую вакуумную камеру с технологической дверью и с первым источником металла и первым маскодержателем с первой маской и вторую вакуумную камеру со второй технологической дверью, вторым источником металла и вторым маскодержателем со второй маской, отличной от первой. Транспортная вакуумная камера установки сообщется с вакуумными камерами через соответствующие первый и второй вакуумные затворы. Манипулятор установлен в транспортной камере с возможностью обеспечения захвата и перемещения подложкодержателя с подложкой между камерами и установки его на маскодержатель с маской. 3 ил.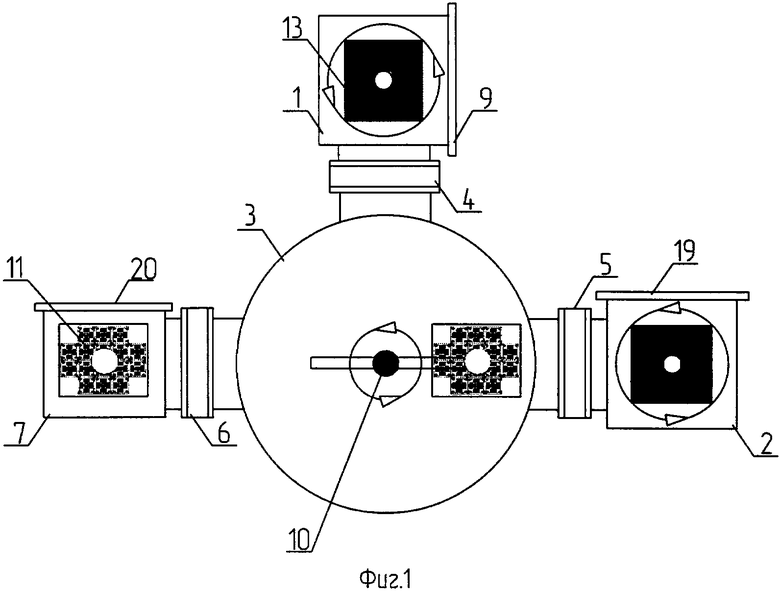
1. Установка для напыления в вакууме топологического тонкопленочного рисунка гибридной микросхемы на подложку, установленную в подложкодержателе, содержащая первую вакуумную камеру с первым источником металла и первым маскодержателем с первой маской, отличающаяся тем, что в нее введены, по крайней мере, вторая вакуумная камера со вторым источником металла и вторым маскодержателем со второй маской, отличной от первой, транспортная вакуумная камера, сообщающаяся с вакуумными камерами через соответствующие первый и второй вакуумные затворы, манипулятор, установленный в транспортной камере, с возможностью обеспечения захвата и перемещения подложкодержателя с подложкой между камерами и установки его на маскодержатель с маской.
2. Установка по п. 1, отличающаяся тем, что она содержит шлюзовую вакуумную камеру загрузки-выгрузки подложкодержателя с подложкой, сообщающуюся с транспортной камерой через третий вакуумный затвор, через который подложкодержатель доступен для захвата манипулятором.
| УСТРОЙСТВО ДЛЯ НАПЫЛЕНИЯ В ВАКУУМЕ ТОНКИХ СЛОЕВ МНОГОСЛОЙНЫХ ИЗДЕЛИЙ | 2010 |
|
RU2432417C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ МНОГОСЛОЙНЫХ ПОКРЫТИЙ В ВАКУУМЕ | 1995 |
|
RU2066706C1 |
| Беспламенная горелка для сжигания газа низкого давления | 1949 |
|
SU87854A1 |
| Способ измельчения угля взрыванием | 1949 |
|
SU84384A1 |
| УСТАНОВКА ДЛЯ ВАКУУМНОЙ ИОННО-ПЛАЗМЕННОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ | 2005 |
|
RU2294395C2 |
| US4036171A, 19.07.1977. | |||

