Изобретение относится к машиностроению, а именно к средствам контроля зубчатых механизмов.
Цель изобретения - упрощение и повышение надежности процесса измерения за счет обеспечения возможности исключения дробной части передаточного отношения механическим путем.
На чертеже изображена блок-схема устройства для реализации способа измерения кинематической погрешности механизмов с дробным передаточным отношением.
Устройство включает в себя датчики 1 и 2 угла поворота быстроходного и тихоходного звеньев контролируемого механизма 3, блок 4 управления враш,ением датчика тихоходного звена, делители 5 и 6 частоты, подключенные к выходам датчиков 1 и 2 соответственно, фазометр 7, соединенный входами с выходами делителей 5 и 6, и регистратор 8, подключенный к выходу фазометра 7.
Способ осуществляют следующим образом.
Устанавливают датчики 1 и 2 угловых перемещений на быстроходном и тихоходном звеньях механизма 3, определяют разность фаз и по ней оценивают кинематическую погрешность механизма, а датчик 2 тихоходного звена вращают в направлении, противоположном направлению вращения тихоходног О звена с угловой скоростью, определяемой из соотношения
U)
UJ5( рад/с.
где uJg -угловая скорость звена, на котором установлен подвижный датчик угловых перемещений; t - передаточное отношение контролируемого механизма; li -целая часть передаточного отношения контролируемого механизма.
Сигналы с датчиков 1 и 2 поступают через делители 5 и 6, где передаточное отношение приводится к соотношению 1:1 по целой части передаточного отношения, на фазометр 7 и далее на регистратор 8 (например, самописец).
Пример. В качестве контролируемого механизма используется редуктор с передаточным отношением равным 10, 3, угловая скорость на входе равна 20,6 рад/с. Датчик 1 угловых перемещений следует установить на вход редуктора, а на выход - подвижный датчик 2 угловых перемещений. Угловая скорость выходного вала редуктора рассчитывается и она равна 20,6:10,3
0 2 рад/с.
Скорость вращения подвижного датчика 2 устанавливается с помощью блока 4 управления и должна быть в данном примере равна
)B(-|fj1) 0,06 рад/с .
Направление вращения подвижного датчика противоположно вращению выходного вала. Делители 5 и 6 следует установить на передаточное отношение 1:10.
Если у исследуе.мого механизма целое передаточное число (например ), то .
Формула изобретения Способ измерения кинематической погрешности механизмов с дробным передаточным отношением, заключающийся в том, что устанавливают датчики угловых перемещений на быстроходном и тихоходном звеньях передачи, определяют разность фаз сигналов, поступающих с датчиков, и по
0 ней оценивают кинематическую погрещность механизма, отличающийся тем, что, с целью упрощения и повышения надежности процесса измерения, датчик тихоходного звена вращают в направлении, противоположном направлению вращения тихоходного звена,
5 с угловой скоростью, определяемой из соотношения
5
и) Шв(
1) рад/С
где 6
0
t -
U
угловая скорость звена, на котором установлен подвижный датчик угловых перемещений; передаточное отношение контролируемого механизма; -целая часть передаточного отношения контролируемого механизма.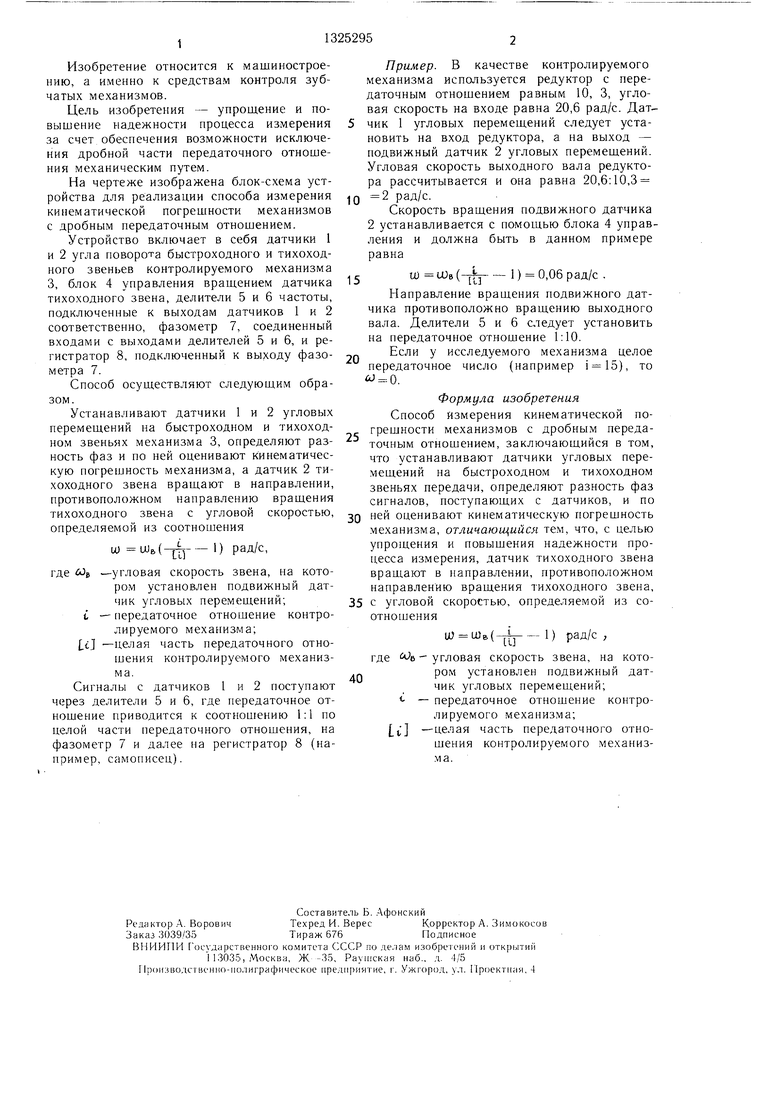
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения кинематической погрешности механизма с дробным передаточным отношением | 1988 |
|
SU1589042A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1100494A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙПЕРЕДАЧ | 1967 |
|
SU198708A1 |
| Способ контроля кинематической погрешности зубчатых механизмов | 1975 |
|
SU579536A2 |
| Устройство для контроля кинемати-чЕСКОй пОгРЕшНОСТи пЕРЕдАч | 1975 |
|
SU819573A1 |
| ГАЙКОВЕРТ | 2011 |
|
RU2473417C1 |
| СИНХРОННЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2579756C2 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1015245A1 |
| Устройство для контроля относительной скорости механизмов | 1978 |
|
SU734790A1 |
| Стенд для испытания редукторов с коаксиальными валами | 1985 |
|
SU1328703A2 |
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых механизмов. Цель изобретения - унро- щение и повышение надежности процесса измерения за счет обеспечения возможности исключения из него дробной части передаточного отношения механическим путем. Это достигается тем, что на тихо.ходном звене контролируемого механизма 3 установлен датчик 2 угла поворота с возможностью поворота вокруг тихоходного звена. При измерении датчик 2 тихоходного звена враш,ают в направлении, противоположном направлению вращения тихоходного звена, с угловой скоростью, рассчитанной с учетом передаточного отношения контролируемого механизма 3. дробной части передаточного отношения и угловой скорости тихоходного звена. 1 ил. ID (Л со N5 СП гч:) со ел
| Ионак В | |||
| Ф | |||
| Приборы кинематического контроля | |||
| М.: / Машиностроение, 1981, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
