Изобретение относится к машиностроению, а именно к методам и средствам контроля зубчатых механизмов.
Цель изобретения - упрощение спо соба и повышение точности.
На чертеже представлена функциональная схема устройства дпя измерения кинематической погрешности.
Устройство дпя реапизадии предлагаемого способа измерения кинематической погрешности механизма с дробным передаточным отношением додерямт исследуемый (поверяем 1й) механизм 1. (фиг. 1), датчики 2 и 3 угла поворота, установленные соответсвенно на входе и выходе указанного механизма, счетчики 4 и 5 импульсов, фазометр 6. .УпраБЛяе1 1е счетчики 4 и 5 импуль- сов можно выполнить на базе микро- ;-хем типа 155 ИЕб (с двоичным кодом) Ш1И типа 155 ИЕ8 (с десятичным ко- , дом),
Способ осуществляется следующим
образом.
Допустим для примера, что передаточное отношение исследуемого механизма 1 (например, редуктора) равно 1,67. Если с датчика 3 (с выхода редуктора) поступило 100 импульсов, то с датчика 2 (с входа) должно поступить 167 импульсов за этот же период времени. Для измерения кинематической погрешности по предлагаемому способу регулируют (устанавливают) счетчик 5 таким образом, что каждый i сотый сигнал поступает на фазометр ; 6. Счетчик 4 реагирует на 167 импульсов, т.е. каждь1й 167-ой импульс поступает на фазометр 6 для сравнения по фазе с кажфш сотым.импульсом. Величина разности фаз этих импульсов пропорциональна кинематической погрешности исследуемого механизма 1 (редуктора). Теоретический уровень
сл
с
СП
00
ю
точности измерения кинематической по- грешности механизмов с дробным переда- тонным отношением определяется (и: обеспечивается) количеством импульсов,. Устанавливаемых на счетчиках, и их соотношением.
Фор мул
изобретения
Способ измерения кинематической погрешности механизма с дробным ле- радаточным отношением, заключ шщийся в том что устанавливают датчики угла поворота на быстроходном и тихоходном механизма, определяют
0
5
разность фаз сигналов с зтих датчиков и по ней-оценивают кинематическую погрешность механизма, о т л и - чающийся тем, что, с целью упрощения способа и повышения точности, сигналы с двух датчиков угла поворота подают на управляемое счетчики, а разность фаз определяют каждый раз по одному информационному импульсу, поступающему со счетчиков на фазометр, при достижении установленных чисел импульсов отдельно на каждом из счетчиков, соотношение которых соответствует передаточному отношению, .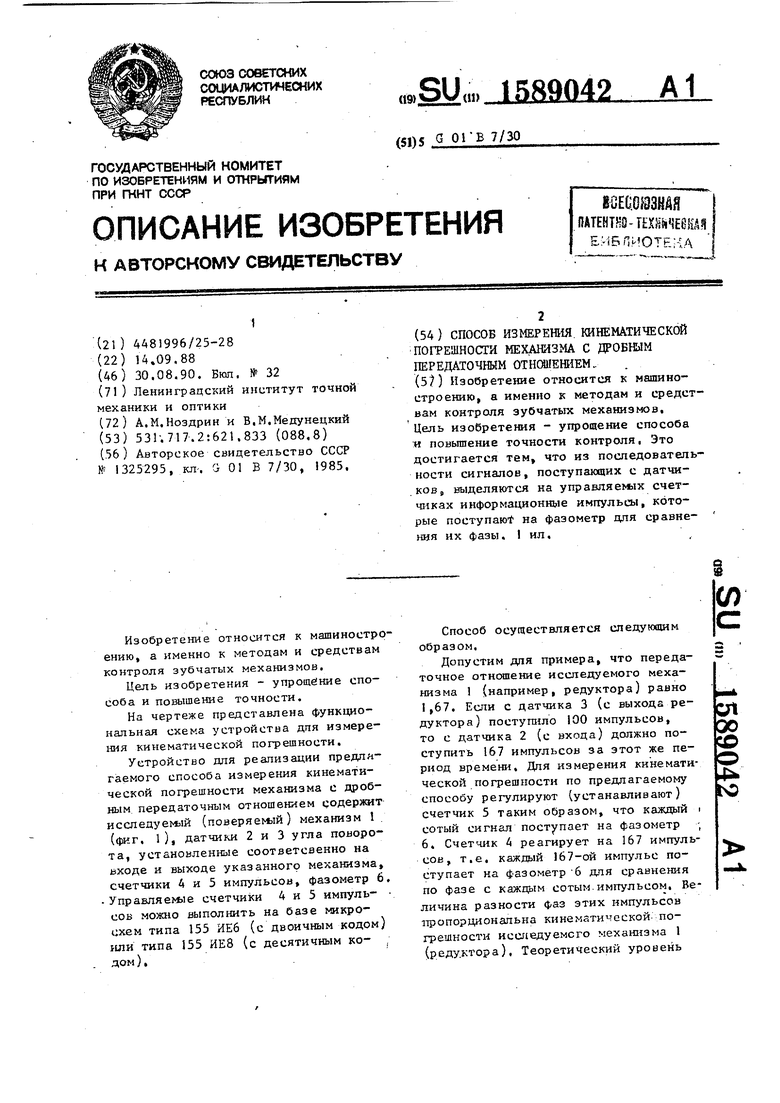

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения кинематической погрешности механизмов с дробным передаточным отношением | 1985 |
|
SU1325295A1 |
| Устройство для контроля относительной скорости механизмов | 1978 |
|
SU734790A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1015245A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ РЕДУКТОРОВ | 1972 |
|
SU420864A1 |
| Способ контроля кинематической погрешности зубчатых механизмов | 1975 |
|
SU579536A2 |
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Способ измерения кинематической погрешности зубчатых передач | 1979 |
|
SU783576A1 |
| Устройство для измерения погрешности механических передач | 1980 |
|
SU901822A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU962761A1 |
Изобретение относится к машиностроению, а именно к методам и средствам контроля зубчатых механизмов. Цель изобретения - упрощение способа и повышение точности контроля. Это достигается тем, что из последовательности сигналов, поступающих с датчиков, выделяются на управляемых счетчиках информационные импульсы, которые поступают на фазометр для сравнения их фазы. 1 ил.
| Способ измерения кинематической погрешности механизмов с дробным передаточным отношением | 1985 |
|
SU1325295A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
