13
Изобретение относится к весодози- рующей технике и может быть использовано при п{)оизводстве смесей заданного состава в металлурги теской, хими- ческой, комбикормовой промьшшенности и в других отраслях народного хозяйства .
Цель изобретения - увеличение точности, поддержания заданного соотноше- НИН производительностей весовых дозаторов непрерывного действия.
Сущность изобретения заключается в том, что заданная величина произво- дительности. q(t) каждому (i-му) дозатору формируется в зависимости от определяющихся рецептом дозируемой смеси заданных долей компонентов Nи от суммарной производительности системы дозирования q(t) с учетом статистических характеристик отклонения (t) и Aq (t) фактических производительностей дозаторов q,(t) и системы дозирования (y(t) от задав- ных величин q(t) и q(t).
Отклонения фактических производи™ тельностей обусловлены множеством факторов (непостоянство влажности дозируемого материала, его плотности, характеристик истечения материала из расходных емкостей и т.д.). Поэтому q.(t) и q (t) могут быть представлены в виде стационарньпс случайных процессов:
q.(t) qj(t) +Aq.(t), q(t)
q(t) + Aq(t),
сечение которых имеет нормальньй закон распределения с математическим ожиданием m и средним квадратическим отклонением 6. Тогда фактические соотношения производительностей дозаторов можно описать системой п двумерных плотностей вероятности случайных величин (t) и q(t) .
Имеем
f Jq,(t) . q(t) --.. X
Г 1 (t) - m,-
()L v
.) - 4
-бТб,- -у--
1 1,n (1 где -, m. - среднее квадратическое
отклонение и математическое ожидание производительности i-ro дозатора,
й-- ( - среднее квадратическое г. ,. I
отклонение суммарной производительности системы дозирования;
Pi T/ V - коэффициент корреляции производительности i-ro дозатора и суммарной производительности системы и дозирования, m ZH m. -математическое ожидание суммарной производительности системы дозирова- ния.
Математш1еское ожидание соотношения г. q(t)/q (t) при малых G J можно записать как
5
о 5
0
5
Ч 1 i
(2)
где функция распределения соотношения производительностей имеет вид
со
f,(r.) 5 q(t)f Jr,qg(t), q(t) x
0
о о X clq(t)- (t).qj.(t), q(t) x
X ).(3)
При этом ra,- r. и смещение ( (m,-- r°) растет с увеличением средних квадратических отклонений. Причем m,.r° при и т,. т° при г. 0,5.
Увеличение точности поддержания заданного соотношения производительностей дозаторов достигается за счет того, что при их работе кроме фактических производительностей измеряются также и их статистические характеристики (математ тческие ожидания и средние квадратические отклонения), с учетом которых по формулам (2) и (3) вычисляют математические ожидания фактических соотношений производительностей дозаторов и их отклонения от заданных величин, а затем формируют дозаторам задания производительности, смещенные на величину этик отклонений. Для зтого в систему дозирования введены сумматор и блок определения статистических характеристик фактической производительности системы, а в каждый контур регулирования введены блок определения статистических характеристик фактической производительности дозатора и блок деления.
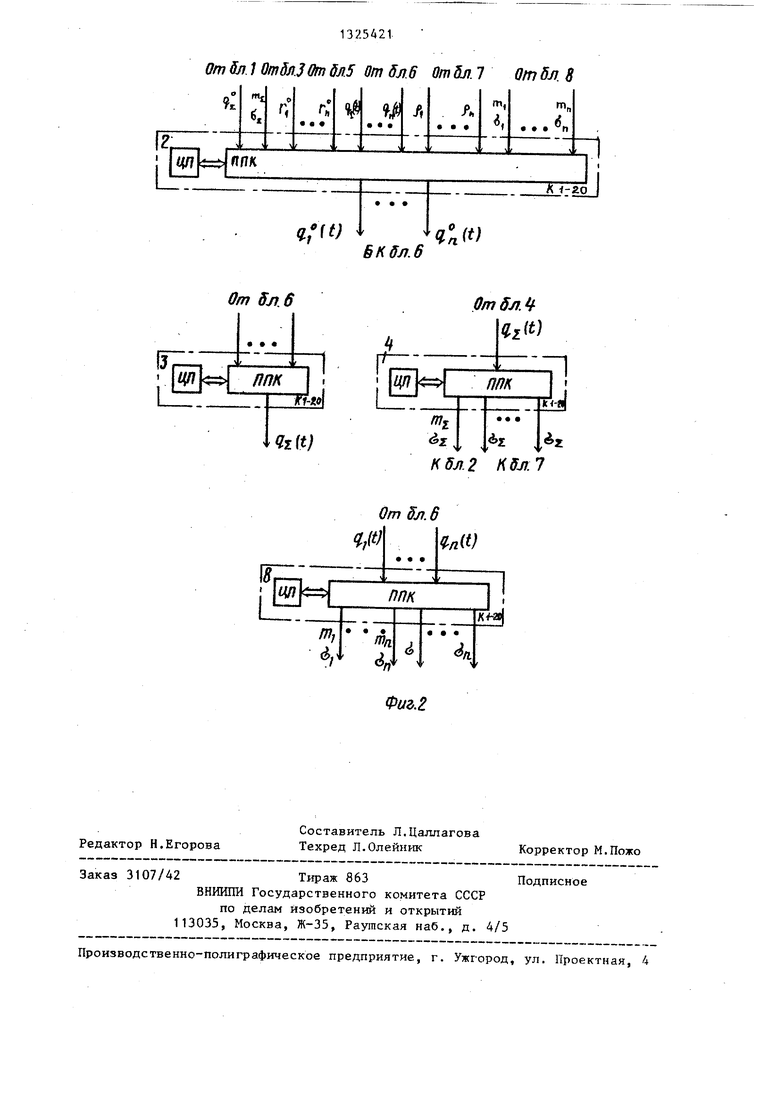
На фиг.1 изображена функциональная схема системы непрерывного весового дозирования, на фиг.2 функцкональ
нал схема цифрового варианта системы на базе контроллера программируемого универсального Электроника К1-20, рассчитанного на управление пятью дозаторами.
Система состоит из задатчика 1 суммарной производительности, блока 2 коррекции уставок производительности дозаторов, сумматора 3 и блока Д определения ста тистических характеристик фактической производительности системы, а также из п каналов регулирования, каждый из которых содержит блок 5 задания производительности до- затора, весовой дозатор 6 непрерывного действия, блок 7 деления и блок 8 определения статистических характеристик фактической производительности дозatopа.
Система непрерьшного дозирования работает следующим образом.
Сигналы фактических производитель- ностей дозаторов 6 поступают в сумматор 3, где вычисляется суммарная про- изводительность системы дозирования. В блоках 4 определения статистических характеристик и 8 на скользящем интервале времени вычисляются математические ожидания (первьй выход) и среднее квадратическое отклонение (второй выход) фактической производительности системы дозаторов 6. В блоках 7 деления вычисляется коэффициент корреляции производительностей дозаторов 6 и суммарной производительности системы как отношение их средних квадратических отклонений. В блок 2 коррекции поступают величины фактических производительностей от дозаторов 6, заданная суммарная производительность системы из задатчика 1, заданные производительности дозаторов из блоков 5 задания и статистических характеристик отклонений фак- тических величин от заданных из блоков 4 и 8. В блоке коррекции определяется отклонение математического ож1адания соотношения производительно
стей дозаторов непрерывного действия gQ
от величины, задаваемой блоками 5, и вырабатывается задание дозаторам 6, смещенное на величину этого отклонения.
Блоки 4 и 8 определения статистических характеристик идентичны и осуществляют измерение среднего значения и среднего квадратического отклонения входного сигнала на скользящем вре-; менном интервале t, . Система дозирования не критична к длительности этого интервала, но величина его должна
быть такой, чтобы сглаживать случайные колебаняя производительностей дозаторов 6. Для реальных дозаторов
„ - . .,, . При этом блоками 4
Блоки 2, 3, 4 и 8 представляют со- ее о
/ ьь и 8 реализуются зависимости
бои обычные вычислительные (.ари(|метические) устройства, которые могут быть реализованы, в частности, на базе одноплатных микро-ЭВМ (Электроника
г
|- 1 q(t)cit; 6 - f S q(t) -шЗа -
m
0
15 0
25 45
HU-80, К1-20, К1-30 и т.д.). Работа этих блоков наиболее полно может быть описана алгоритмами функционирования, где q - производительность,
t - отношение производительности дозатора к производительности системы
Q - наибольший предел производительности;
п - количество дозаторов в системе;
m - математическое ожидание, 6 - среднее квадратическое отклонение;2 - величина, характеризующая
суммарную производительность системы; i - величина, характеризующая
производительность i-ro дозатора ,
Ф - фиктивная (промежуточная, расчетная) величина; t - текущее время.
Сумматор 3 реализует зависимость -q,(t).
q.(t s
1 4
Алгоритм.его работы, представленный на формализованном языке, имеет следующий вид:
0;
1,q. 0;
1 :
q : Яф + Чч
1 г п,
то
(q.
q.
переход
р если
на 2), .
i: i + 1;
переход на 3.
Таким образом, на выходе сумматора 3 в установ1шшемся режиме находится значение суммарной производительности системы непрерывного весового дозИ рования.
Блоки 4 и 8 определения статистических характеристик идентичны и осуществляют измерение среднего значения и среднего квадратического отклонения входного сигнала на скользящем вре-; менном интервале t, . Система дозирования не критична к длительности этого интервала, но величина его должна
8 реализуются зависимости
г
|- 1 q(t)cit; 6 - f S q(t)
Приближенно с достаточной точностью m и 6 могут быть определены по следующему алгоритму.
Переход на 2, где К - коэффициент иммитирующий интегрирование на сколь зящем интервале времени. Величина К определяется один раз, в зависимости от фактической длительности одного цикла tj :.
К- , при этом К . 1 . Возможно более точное определение п и 6 . При этом запоминается п (где п последних отсчетов q и вычисляются выражения
ч п 1 «
m - цтл(з -(q - m)2.
n i«4
Однако такой способ требует запоминания массива значительной размерности, что влечет необоснованное уве личение емкости памяти блоков 4 и 8, и не позволяет применить стандартные одноплатные микро-ЭВМ
Блок 2 координации определяет сме- щейие математических ожиданий фактических соотношений производительнос- тей дозаторов и рассчитывает величин координирующего воздействия, обеспечивающую повьшенную точность поддержания фактических соотношений.
Величина математического ожидания соотношения q,.(t)/qg(t) при ма
лых
определится как
m
. , где fp () - плотность вероятности . Причем
00
f,(r,.) «|q(t)fjr,q(t), q(t)di- 00
- I )4hq(t. qк(t)d.
где fo двумерная плотность вероятности процессов q. (t) и
q5:(t).
Для нормальных случайных процессов которыми и являются q,- (t) и qj.(t) имеем
,-) f 1 +.(r,-) X X )(т)
г, ovn 2m j-iBz& + jj qi ()4, 1
где fe(r,-)
isr-
Щг1 26|r. 46.z)
закон Коши (плотность распределения отношения цент
5
0
5
0
5
0
5
0
5
рированных составляющих процессов (q,-(t) и q(t);
h (г.) Si i-gs l - L±-igi i- °il l
( 6.2) (6 r - 24 г ,- + if ) (Г{) - функция Лапласа от аргу мента h(r, ).
Таким образом, т, является функцией четырех параметров: т,-; т„; 6; и 6.
Для реальных систем дозирования mvetO I Qf; m, ,1 q,,; QJ, ;
,1mJ; 6j.4o 0.1 ГОЕ т.е. диапазон изменения параметров Ш; ; т.; dy; 6 известен уже на этапе проектирования системы и зависимость т. (т,; 6; бд,) может быть вычислена заранее на ЭВМ большой мощности (разработана программа для ЕС ЭВМ) и за- табулирована в памяти блока координации в виде четырехвходовой таблицы. Получив по таблице значения для i l7n, вычисляют отклонения ui ш,. - г., а затем вычисляют координирующее воздействие г . С учетом
ик
того, что , г,- 0, г- могут быть
к . 1 «In . получены как г- AI - - Vii.
п тх(
Тогда задания производительности дозаторам должны быть сформированы следующим образом:
о . / о Кх в q. (г,- - i:.)q.
Алгоритм функционирования блока 2 коррекции имеет следующий вид: i: 1;
q- -r-;
если ifn, To(, переход на 2);
проверка наличия сигналов т,-; ф- ; 6j. на выходе блоков 4 и 8 определения статистических характеристик 4 и 8,
i: 1; 0;
поиск в таблице значения т. (т ;
,-;6s);
йФ : аЧз+ m (.. - Г{ ;
если , To( + 1, переход на 6) ,
&V: йФ/п;
i: 1;
q (г ДФ- ь- )q°;.
если i Ф то (i: i+l), пе- /реход на 11).
Формула изобретения
Система непрерывного весового дозирования, содержащая задатчик суммар ной производительности и п каналов регулирования, каждый из которых включает в себя блок задания производительности дозатора и весовой дозатор, отличающаяся тем, что, с целью увеличения точности поддержании заданного соотношения производитель- ностей дозаторов непрерьгеного дей- ствия, система содержит последовательно соединенные сумматор, блок опре- деления статистических характеристик фактической производительности системы и блок коррекции уставок производительности дозаторов, а в каждый канал регулирования дополнительно вве- даны последовательно соединенные блок определения статистических характеристик фактической производительности дозатора и блок деления, причем выход задатчика суммарной производительно- сти подключен к второму входу блока коррекции уставок производительности дозаторов, третий вход которого соединен с вторым выходом блока определения статистических характеристик фак- тической производительности системь и с вторым входом блока деления каждого канала регулирования, вход блока определения статистических характеристик фактической производительности дозатора в каждом канале регулирования соединен с выходом весового дозатора своего канала, с соответствующим входом сумматора и с соответствующим четвертым входом группы блока коррек- ции уставок производительности дозатора, выход блока задания производительности дозатора в каждом канале регулирования подключен к соответствующему пятому входу группы блока коррекции уставок производительности дозаторов, первый выход блока определения статистических характеристик фактической производительности дозатора каждого канала регулирования связан с соответствующим шестым входом группы блока коррекции уставок производительности дозаторов, второй выход - с соответствующим седьмым входом группы блока коррекции уставок производительности дозаторов, выход блока деления каждого канала регулирования подключен к соответствующему восьмому входу группы блока коррекции уставок производительности дозаторов выходы которого соединены с входами соответствующих весовых дозаторов всех каналов регулирования.
От 5л. 10mdflJOm 6л5 От блб От Ил. 7 От бд 8
Редактор Н.Егорова
Составитель Л.Цаллагова Техред Л.Олейник
Заказ 3107/42Ъфаж 863Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Пожо
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для составления смеси заданного состава | 1983 |
|
SU1196819A1 |
| Устройство для стабилизации суммарной производительности параллельно работающих дозаторов | 1982 |
|
SU1169915A1 |
| Способ формирования уставок регулятора перетока мощности по межсистемной связи | 1987 |
|
SU1525808A1 |
| Система непрерывного весового дозирования | 1984 |
|
SU1273889A1 |
| Устройство для управления дозированием | 1980 |
|
SU935884A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ ЖИВОЙ МАССЫ БРОЙЛЕРОВ ПО СТАДУ ПРИ ИХ НАПОЛЬНОМ СОДЕРЖАНИИ | 2012 |
|
RU2515382C2 |
| Устройство для многокомпонентного порционного дозирования компонентов синтетических моющих средств | 1991 |
|
SU1784953A1 |
| Способ испытаний двигателя внутреннего сгорания | 1987 |
|
SU1467424A2 |
| Устройство для автоматического регулирования электрического режима трехфазной дуговой электропечи | 1991 |
|
SU1823158A1 |
| Устройство для составления смесей заданного состава | 1978 |
|
SU709153A1 |

Изобретение относится к весодо- зирующей технике и может быть использовано при производстве смесей заданного состава в металлургической, химической, комбикормовой промышленности ив других отраслях народного хб- зяйства. Целью изобретения является увеличение точности поддержания заданного соотношения производительнос- тей весовых дозаторов непрерьшного действия. Цель достигается тем, что в систему непрерьгоного весового дозирования, содержащую задатчик суммарной производительности и п каналов регулирования, каждый из которых содержит блок задания производительности дозатора и весовой дозатор непрерывного действия, введены блок коррекции уставок производительности дозаторов, сумматор и блок определения статистических характеристик фактической производительности системы, а в каждый контур регулирования введены блок определения статистических характеристик фактической производительности дозатора и блок деления. 2 ил. с б сл te 1чЭ ел 
| Kyryleheck Andrew L | |||
| What to know about gravimetric belt weighing systems.- Canadian controls of instrumentation, November, 1971, p | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
