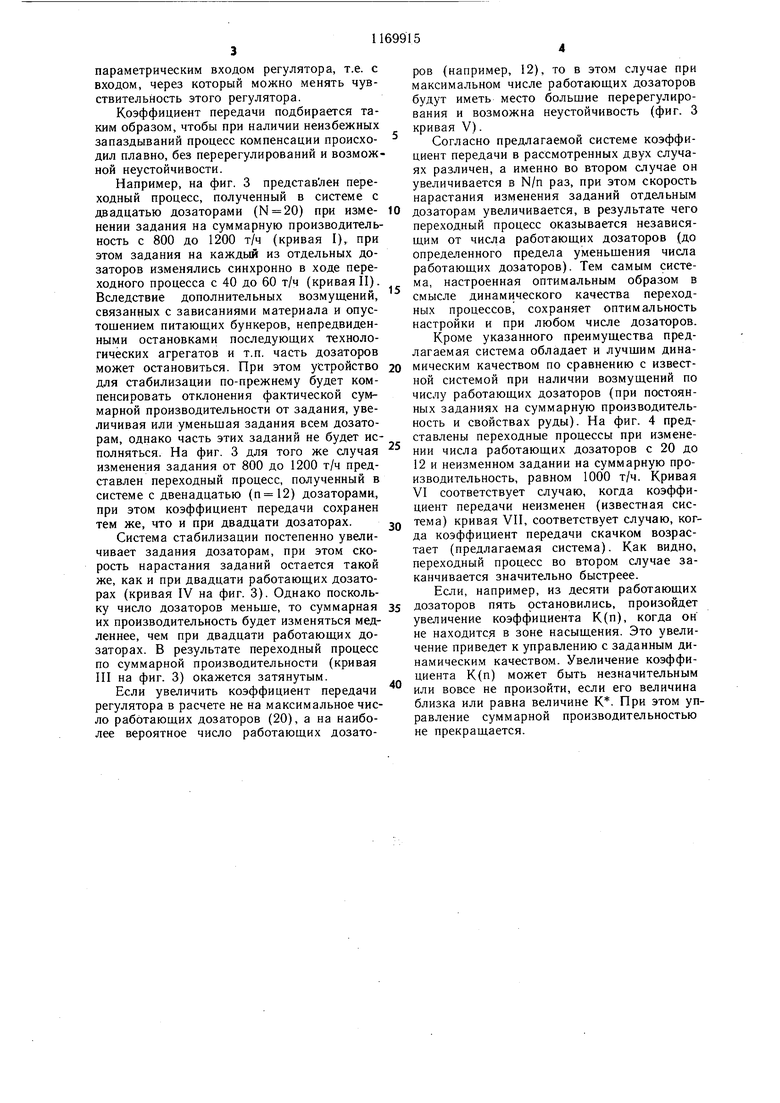
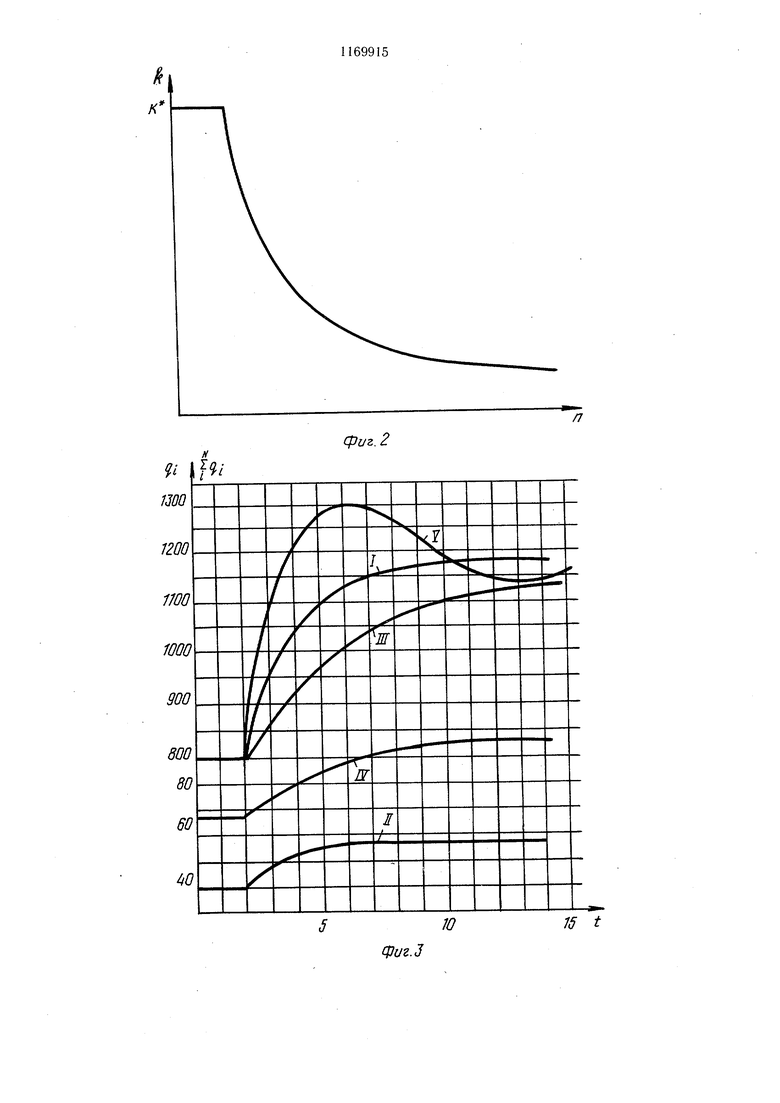
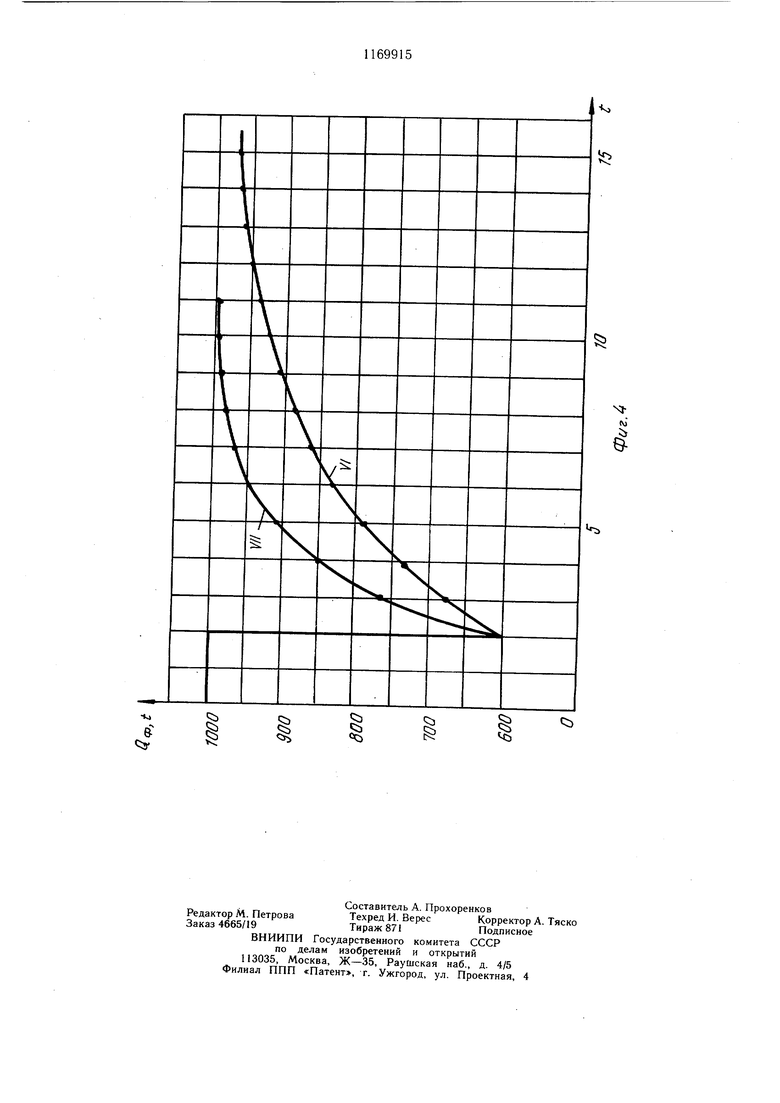
Изобретение относится к системам расхода материалов и может быть использовано в промышленности строительных материалов, металлургии, горно-добывающей и химической отраслях промышленности, в частности в технологических процессах дозирования материалов, где требуется стабилизация суммарной весовой производительности параллельно работающего оборудования. Цель изобретения - повыщение надежности путем улучщения качества динамического процесса. На фиг. 1 изображена блок-схема устройства; на фиг. 2 - статическая характеристика нелинейного функционального преобразователя; на фиг. 3 - переходные процессы устройств для стабилизации суммарной производительности параллельно рабогающих дозаторов при изменении задания с 800-1200 т/ч (соответственно кривые I и II) на фиг. 4 - то же, при неизменном задании 1000 т/ч. Устройство содержит блок 1 измерения суммарной весовой производительности дозаторов, подключенный входами к датчикам 2 весовой производительности, а выходом - к одному из входов блока 3 сравнения, соединенного другим входом с выходом задатчика 4 суммарной производительности, а выходом - с входом блока 5 регулирования производительности, выход которого подключен к входам блоков 6 управления дозаторами. Датчики 7 работы дозаторов подключены к входам сумматора 8, выход которого соединен с входом нелинейного функционального преобразователя 9 с гиперболической характеристикой. Блок 5 регулирования производительности выполнен с дополнительным входом, являющимся параметрическим и соединенным с выходом преобразователя 9. Устройство работает следующим образом. Датчики 2 подают сигналы на входы блока 1. Сигнал суммарной весовой производительности дозаторов поступает с выхода блока I измерения суммарной весовой производительности дозаторов на один из входов блока 3 сравнения, на другой вход которого поступает сигнал с выхода задатчика 4 суммарной производительности. Сигнал разности между заданием на суммарную производительность дозаторов и фактической производительностью дозаторов с выхода блока 3 сравнения поступает на вход блока 5 регулирования производительноети. Сигнал с выхода блока 5 подается на входы блоков 6 управления дозаторами. Сигналы датчиков 7 работы дозаторов подаются на вход сумматора 8, на выходе последнего формируется сигнал числа работающих дозаторов, который подается на вход нелинейного функционального преобразователя 9. Нелинейный функциональный преобразователь 9 осуществляет преобразование сигнала числа работающих дозаторов в соответствии со следующим выражением: при jT к I.K при -i К гдеК -коэффициент передачи регулятора; п -текущее число параллельно работающих дозаторов; N -общее число параллельно работающих дозаторов; К -граничное значение коэффициента k; К -нескорректированный коэффициент передачи регулятора. Нелинейный функциональный преобразователь 9 имеет специальную статическую характеристику (фиг. 2), обеспечивающую заданное качество переходных процессов при переменном числе работающих дозаторов. Сигнал с выхода нелинейного функционального преобразователя 9 подается на параметрический вход блока 5 регулирования производительности (т.е. вход, на котором происходит изменение чувствительности блока 5 к сигналу пассогласования в зависимости от числа работающих дозаторов) для коррекции коэффициента передачи. В процессе работы на дозаторы действуют непрерывные возмущения, связанные с изменениями задания на величину суммарной производительности, изменениями свойств истекающей руды (насыпной вес, реологические свойства и т.п.). Указание возмущения приводят к изменению суммарной производительности дозаторов. Устройство компенсирует возникающие отклонения фактической суммарной производительности ( c{t ) от задания Qj путем одновременного увеличения (или уменьшения) заданий всем дозаторам. Такое управление осуществляется по закону, имеющему интегральный характер. При этом чувствительность регулятора (коэффициент передачи) зависит от числа работающих дозаторов. При использовании интегрального регулятора увеличение (уменьшение) заданий дозаторам производится в соответствии со следующим соотношением: qt qt-i+k(n) (Q.), т.е. на вход регулятора подается сигнал 6... k(n) (Q.- q,,,). Таким образом, устройство осуществляет стабилизацию суммарной производительности дозаторов (задание на производительность каждого из дозаторов не изменяется только при & ), а регулирование ведет с переменной фувствительностью k(n). Переменная чувствительность обеспечивается с помощью специального нелинейного функционального преобразователя, на вход которого подключен сигнал числа работающих дозаторов, а выход которого соединен с параметрическим входом регулятора, т.е. с входом, через который можно менять чувствительность этого регулятора. Коэффициент передачи подбирается таким образом, чтобы при наличии неизбежных запаздываний процесс компенсации происходил плавно, без перерегулирований и возмож ной неустойчивости. Например, на фиг. 3 представлен переходный процесс, полученный в системе с двадцатью дозаторами (N 20) при изменении задания на суммарную производитель ность с 800 до 1200 т/ч (кривая I), при этом задания на каждый из отдельных дозаторов изменялись синхронно в ходе переходного процесса с 40 до 60 т/ч (кривая II). Вследствие дополнительных возмущений, связанных с зависаниями материала и опустошением питающих бункеров, непредвиденными остановками последующих технологических агрегатов и т.п. часть дозаторов может остановиться. При этом устройство для стабилизации по-прежнему будет компенсировать отклонения фактической суммарной производительности от задания, увеличивая или уменьшая задания всем дозаторам, однако часть этих заданий не будет исполняться. На фиг. 3 для того же случая изменения задания от 800 до 1200 т/ч представлен переходный процесс, полученный в системе с двенадцатью () дозаторами, при этом коэффициент передачи сохранен тем же, что и при двадцати дозаторах. Система стабилизации постепенно увеличивает задания дозаторам, при этом скорость нарастания заданий остается такой же, как и при двадцати работающих дозаторах (кривая IV на фиг. 3). Однако поскольку число дозаторов меньше, то суммарная их производительность будет изменяться медленнее, чем при двадцати работающих дозаторах. В результате переходный процесс по суммарной производительности (кривая III на фиг. 3) окажется затянутым. Если увеличить коэффициент передачи регулятора в расчете не на максимальное число работающих дозаторов (20), а на наиболее вероятное число работающих дозаторов (например, 12), то в этом случае при максимальном числе работающих дозаторов будут иметь место большие перерегулирования и возможна неустойчивость (фиг. 3 кривая V). Согласно предлагаемой системе коэффициент передачи в рассмотренных двух случаях различен, а именно во втором случае он увеличивается в N/n раз, при этом скорость нарастания изменения заданий отдельным дозаторам увеличивается, в результате чего переходный процесс оказывается независящим от числа работающих дозаторов (до определенного предела уменьшения числа работающих дозаторов). Тем самым система, настроенная оптимальным образом в смысле динамического качества переходных процессов, сохраняет оптимальность настройки и при любом числе дозаторов. Кроме указанного преимущества предлагаемая система обладает и лучшим динамическим качеством по сравнению с известной системой при наличии возмущений по числу работающих дозаторов (при постоянных заданиях на суммарную производительность и свойствах руды). На фиг. 4 представлены переходные процессы при изменении числа работающих дозаторов с 20 до 12 и неизменном задании на суммарную производительность, равном 1000 т/ч. Кривая VI соответствует случаю, когда коэффициент передачи неизменен (известная система) кривая VII, соответствует случаю, когда коэффициент передачи скачком возрастает (предлагаемая система). Как видно, переходный процесс во втором случае заканчивается значительно быстреее. Если, например, из десяти работающих дозаторов пять остановились, произойдет увеличение коэффициента К(п), когда он не находится в зоне насыщения. Это увеличение приведет к управлению с заданным динамическим качеством. Увеличение коэффициента К(п) может быть незначительным или вовсе не произойти, если его величина близка или равна величине К. При этом управление суммарной производительностью не прекращается.
/
Сриг.2
15 t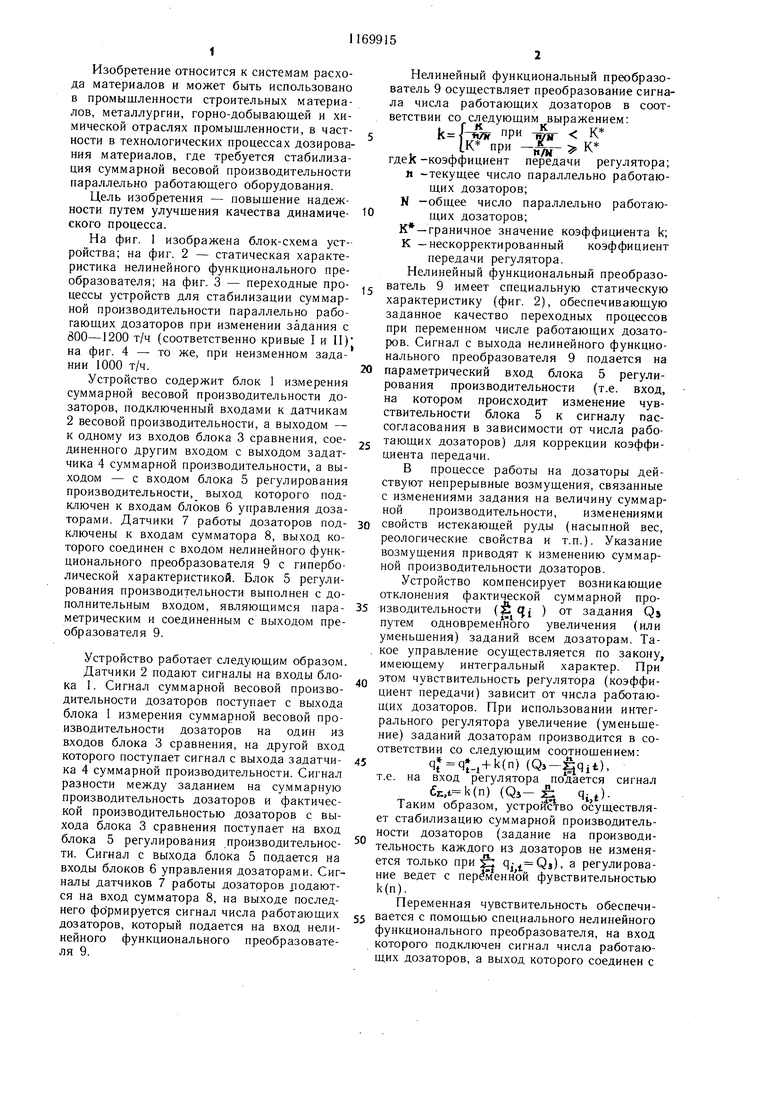
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления стадиальным технологическим процессом обогащения руд, преимущественно асбестовых | 1988 |
|
SU1641429A1 |
| Способ управления процессом выращивания монокристаллов под защитной жидкостью методом Чохральского и устройство для его осуществления | 1988 |
|
SU1745780A1 |
| ЭЛЕКТРОПРИВОД С КООРДИНАТНО-ПАРАМЕТРИЧЕСКИМ УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2004 |
|
RU2261522C1 |
| Система регулирования тягового режима газоходной сети параллельно работающих конверторов | 1979 |
|
SU870452A1 |
| Система управления аппаратом воздушного охлаждения газа | 2016 |
|
RU2690541C2 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| Устройство для автоматического управления процессом ректификации | 1978 |
|
SU722553A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ И СИЛ ТЯГИ И ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МНОГОСЕКЦИОННОГО ЭЛЕКТРОВОЗА | 1995 |
|
RU2099210C1 |
| Следящая система | 1979 |
|
SU824126A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ Cy/V MAPHOH ПРОИЗВОДИТЕЛЬНОСТИ ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ДОЗАТОРОВ, содержащее блок измерения суммарной весовой производительности дозаторов, подключенный входами к датчикам весовой производительности, а выходом - к одному из входов блока сравнения, соединенного другим входом с вы.ходом задатчика суммарной производите.1ь ности, а выходом - с входом блока регулирования производительности, выход которого подключен к входам блоков управления дозаторами, отличающееся тем, что, с целью повышения надежности путем улучшения качества динамического процесса, оно снабжено датчиками работы дозаторов, соединенным с их выходами сумматором и нелинейным функциональным преобразователем с гиперболической характеристикой, I а блок регулирования производительности (Л выполнен с дополнительным входом, являющимся параметрическим и соединенным с выходом указанного преобразователя, подключенного входом к выходу сумматора. О5 со со ел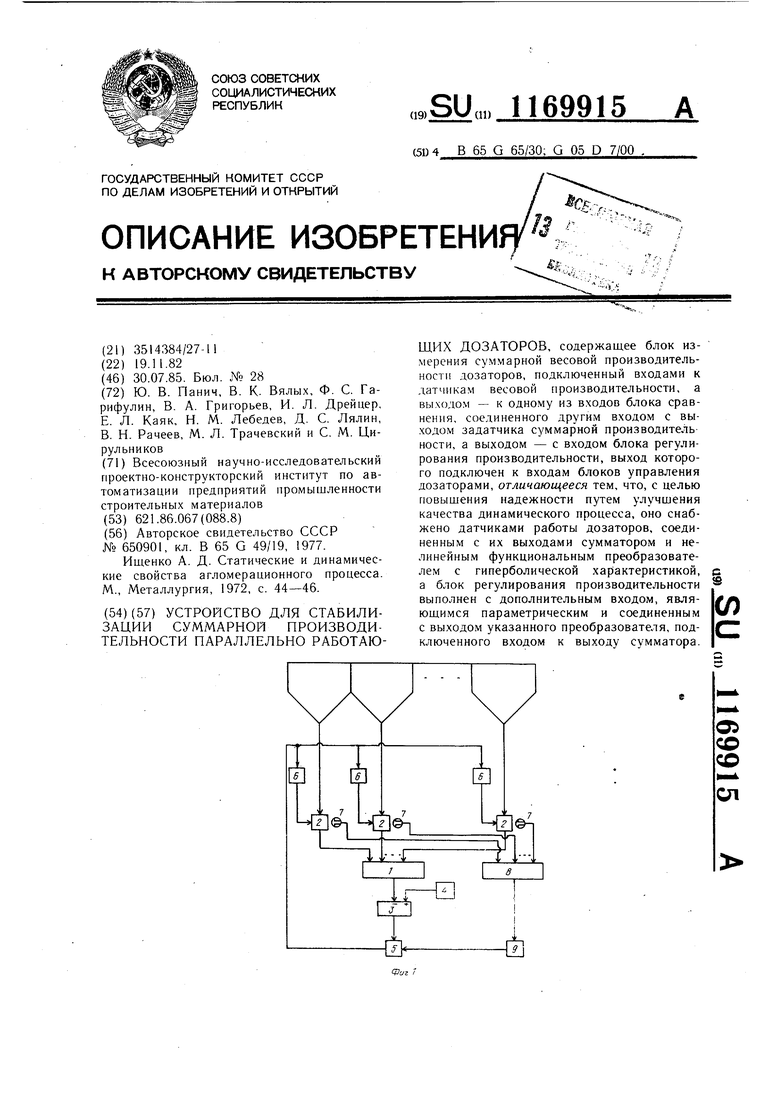
| Система управления загрузкой и разгрузкой бункерных установок | 1977 |
|
SU650901A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Ишенко А | |||
| Д | |||
| Статические и динамические свойства агломерационного процесса | |||
| /V., Металлургия, 1972, с | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
