Изобретение относится к области машиностроения, может быть использовано в конструкциях устройств угловой ориентации объектов, задающих прецизионные угловые положения по трем ортогональным осям, и является усовершенствованием устройства по авт. св. 1200267.
Цель изобретения - расширение диапазона ориентации.
На чертеже схематично изображено предлагаемое устройство, общий вид.
.Устройство для ориентации объекта содержит неподвижное основание с установленным в его .цилиндрической направляющей 2 подвижным основанием 3 со сферической поверхностью 4 и посадочным местом 5 под ориентируемый объект 6, ограничитель 7 угла поворота и регулировочные элементы 8-10 подвижного основания 3 в виде под- пруткиненных пальцев, установленных в неподвижном основании 1 и сопряженных с пазами 11 и 12 подвижного основания с помощью эксцентрично установленных на пальцах 7 - 10 элементов 13 перемещения, выполненных в виде шарикой, пальцы 7-10 снабжены конусными углублениями 14, выполненными эксцентрично относительно продольной оси пальцев 7 - 10, пазы подвижного основания 3 выполнены в виде V-образных кольцевой 11 и продольной 12 канавок, причем продольна
канйвка 12 выполнена на лыске 15 под-35 лах, определяемых эксцентрисит.етом
вижного основания.
Каждый регулировочный элемент 7-10 снабжен эксцентриковой втулкой I6 с кольцевым выступом 17 на внутренней поверхности 18, с буртом на.19 на одном торце .и впадинами 20 на другом, дополнительной цилиндрической пружиной 21 и регулировочной ручкой 22, в центральном отверстии 23 которой вьшолнен уступ 24j а в ступице 25 - зубья 26 на ее торцевой поверхности, причем в регулировочной ручке 22 радиально установлен штифт 27, сопряженной с диаметральным сквозным пазом 28, выполненным на х востовике пальца, установленного с возможностью осевого .перемещения в эксцентриковой втулке 16, а дополнительная цилиндрическая пружина 21 установлена соосно с пальцем между кольцевым выступом I7 экс- центриковой втулки 16 и уступом 24 регулировочной ручки 22, установленной подвижно на пальце ля сопряжения своими зубьями 26 с впадинами 20 эксцентриковой втулки 16, бурт 19 которой сопряжен с внутренней поверхностью 29 неподвижного основания Г. Пальцы 7 - 10 подпру7кинены основными цилиндрическими пружинами 30. Эксцентриковые втулки 16 зафиксированы в определенных положениях эле- 0 ментами 3 контровки. Для oпpeдeлe v ния положения (направления) эксцентриситета, на эксцентриковых втулках 16 выполнены риски 32, совпадающие с точкой наибольшего (наименьшего) 5 эксцентриситета, а на неподвижном основании нанесены индексы 33.
Устройство работает следующим образом.
Отворачивают элементы 31 конт- 0 ровкй эксцентриковых втулок 16. Посредством осевого перемещения ручки 22 сжимают пружину 30 и зубья 26 на торцевой поверхности ступицы регулировочной ручки 22 вводят во впадины -5 20 эксцентриковой втулки 16. Вращением ручки 22 вращают эксцентриковую втулку 16 и через поводковый штифт 27, регулировочный палец 7, который через шарик 13, расположен- ный в конусном углублении 14, взаимодействует с продольной V-образной канавкой 12 подвижного основания 3, и производят грубую осевую ориентацию юстируемого объекта 6 в предеэксцентриковой втулки 16. Элементом 3 контровки стопорят вращение эксцентриковой втулки 16. .регулировочную ручку 22 устанавливают в исходное положение, выводя зубья 26 ступицы 25 регулировочной ручки 22 из впадин 20 эксцентриковой втулки 16. Вращая регулировочную ручку 22 через поводковый штифт 27, передают враща- тельное движение регулировочному пальцу 7, который через шарик 13 взаимодействует с продольной V-o6 разной канавкой 12 подвюкного основания 3 и позволяет произвести точ- нук) осевую ориентацию юстируемого объекта.
Посредс.твом осевого перемещения другой регулировочной ручкн 22 сжи- мают пружину 30, и зубья 26 на торцевой поверхности регулировочной ручки 22 вводят во впа1 ,яны 20 другой ксцентриковой втулки 16„ Вращением ручки 22 производят вращение эксцентриковой втулки 16 через поводковый штифт 27J регулировочный палец 8, который Через шарик 13 взаимодействует с кольцевой V-образной канавкой 11 подвижного основания 3, обеспечивая грубое регулирование углового положения ориентируемого объекта 6 в пределах, определяемых эксцентриситетом эксцентриковой втулки 16. Элементом 31 контровки стопорят вращение экс- центриковой втулки 16. Регулировочную ручку 22 устанавливают в исходное положение при этом зубья 26 сту- пиць 25 ручки 22 выходят из впадин 20 эксцентриковой втулки 16.
. При вращении другой регулировочной .ручки 22 через поводковый штифт 27 вращается регулировочный палец 8, и шарик 13, расположенньй в конусном углублении 14, взаимодействует с V- образной кольцевой канавкой 11 подвижного основания 3, что позволяет произвести точную регулировку углово- го положения ориентируемого объекта в пределах, определяемых эксцентриси- тетом конусного углубления 14, выполненного в пальце 8,
Аналогичным образом работают все остальные регулировочные механизмы, обеспечивая грубую и точную регулиСоставитель В. Муханов Редактор Н. Егорова Техред А.Кравчук Корректор Л. Пилипенко
Заказ 3108/43 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
0 5
0 5
0
ровку ориентации юстируемого объекта по трем ортогональным осям. Формула изобретения Устройство для ориентации объекта по авт.св. № 1200267, от. личaю- щ е е с я тем. что, с целью расширения диапазона ориентации, каждый регулировочный механизм снабткен эксцентриковой втулкой с кольцевым выступом на внутренней поверхности с буртом на на одном торце и впадинами на другом, с дополнительной цилиндрической пружи- иой и регулировочной ручкой, в центральном отверстии которой вьшолнен уступ, а в ступице - зубья на ее торцовой поверхности, причем в регулировочной ручке радиально установлен штифт, сопряженный с диаметральным сквозным пазом, выполненным на хвостовике пальца, установленного с возможностью осевого перемещения в эксцентриковой втулке, а дополнительная цилиндрическая пружина установлена соосно с пальцем между кольцевым выступом эксцентриковой втулки и уступом регулировочной ручки, установленной подвижно на кольце для сопряжения зубьями с впадинами эксцентриковой втулки, бурт которой сопряжен с внутренней поверхностью неподвижного основания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микрометрический механизм | 1987 |
|
SU1506262A1 |
| Юстировочное устройство | 1985 |
|
SU1318967A1 |
| Устройство для ориентации объекта | 1982 |
|
SU1043613A1 |
| Юстировочный прибор | 1979 |
|
SU792200A1 |
| Устройство для ориентации объекта | 1984 |
|
SU1200267A1 |
| Юстировочное устройство | 1989 |
|
SU1700515A1 |
| Устройство управления | 1985 |
|
SU1312553A1 |
| Торцовый ключ | 1977 |
|
SU789269A1 |
| Устройство для разворота оптических элементов | 1981 |
|
SU953610A1 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ и ПОСЛЕДУЮЩЕЙ | 1972 |
|
SU350622A1 |
Изобретение относится к области машиностроения и может быть использовано при разработке устройств задания прецизионных углового и осевого положений юстируемого объекта. Цепью изобретения является расширение диапазона ориентации. Устройство состоит из неподвижного основания 1с установленным в его направляющей 2 подвижньм основанием 3. На подвижном основании 3 выполнены две канавки - одна кольцевая II, а другая продольная 12. Элементы передачи перемещения выполнены в виде шариков 13. Сами регулировочные элементы выполнены в виде подпружиненных пальцев 7-10 с эксцентрично выполненными на них конусными углублениями 14. Расширение диапазона ориентации достигается тем, что каждый регулировочный элемент 7-10 снабжен эксцентриковой втулкой 16 с кольцевым выступом 17, буртом 19 и впадинами 20, дополнительной цилиндрической пружиной 21 и регулировочной ручной 22 с уступом 24 и зубьями 26. Причем в ручке 22 установлен штифт 27, сопряженный с пазом 28 пальца (7-10), установленно - го с возможностью осевого перемещения в эксцентриковой втулке 16, а пружина 21 установлена между выступом 17 и уступом 24. Зубья 26 сопряжены с впадинами 20, а бурт 19 - с внутренней поверхностью 29 неподвижного основания 1. ил. Q в (Л 2Г N) -/г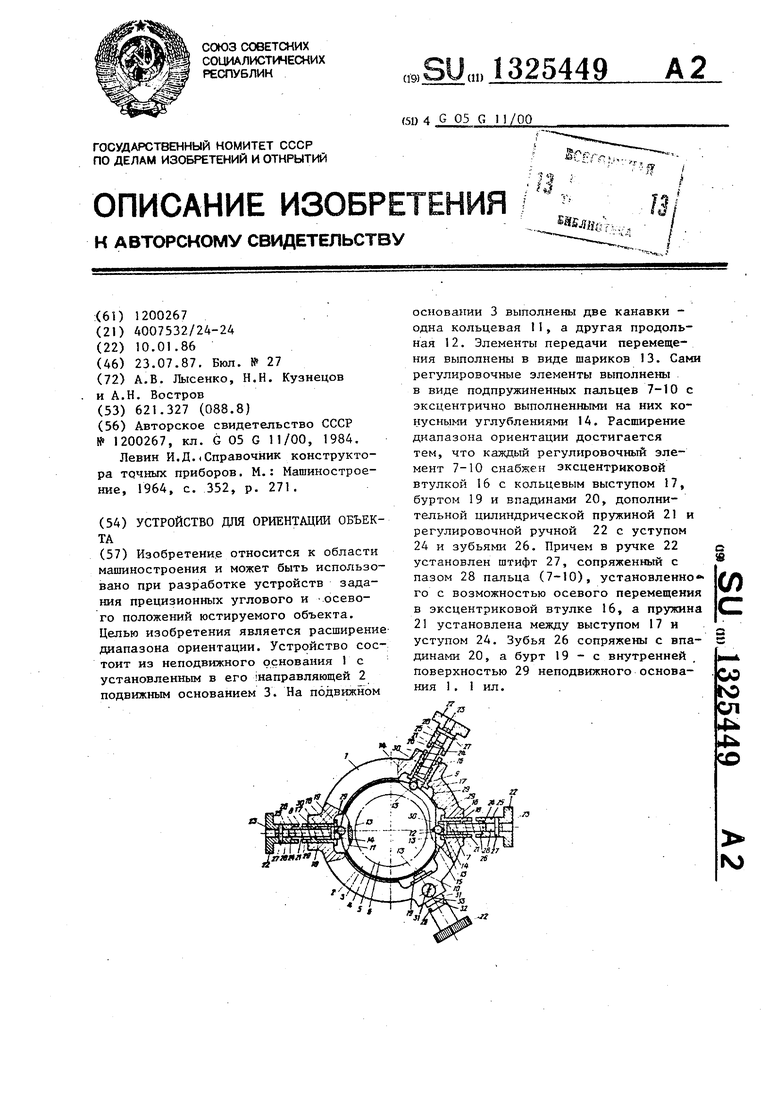
| Устройство для ориентации объекта | 1984 |
|
SU1200267A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Левин И.Д | |||
| (Справочник конструктора точных приборов | |||
| М.: Машиностроение, 1964, с | |||
| Судно | 1918 |
|
SU352A1 |
| Искроудержатель для паровозов | 1920 |
|
SU271A1 |
