Изобретение относится к технике контроля натяжения ременных передач, широко применяемых во многих отраслях промышленности, в частности к лесной промышленности для привода круглых пил, обладающих значительными моментами инерции, которые во много раз превышают моменты инерции двигателей привода пил.
Целью изобретения является повышение надежности и расширение области использования.
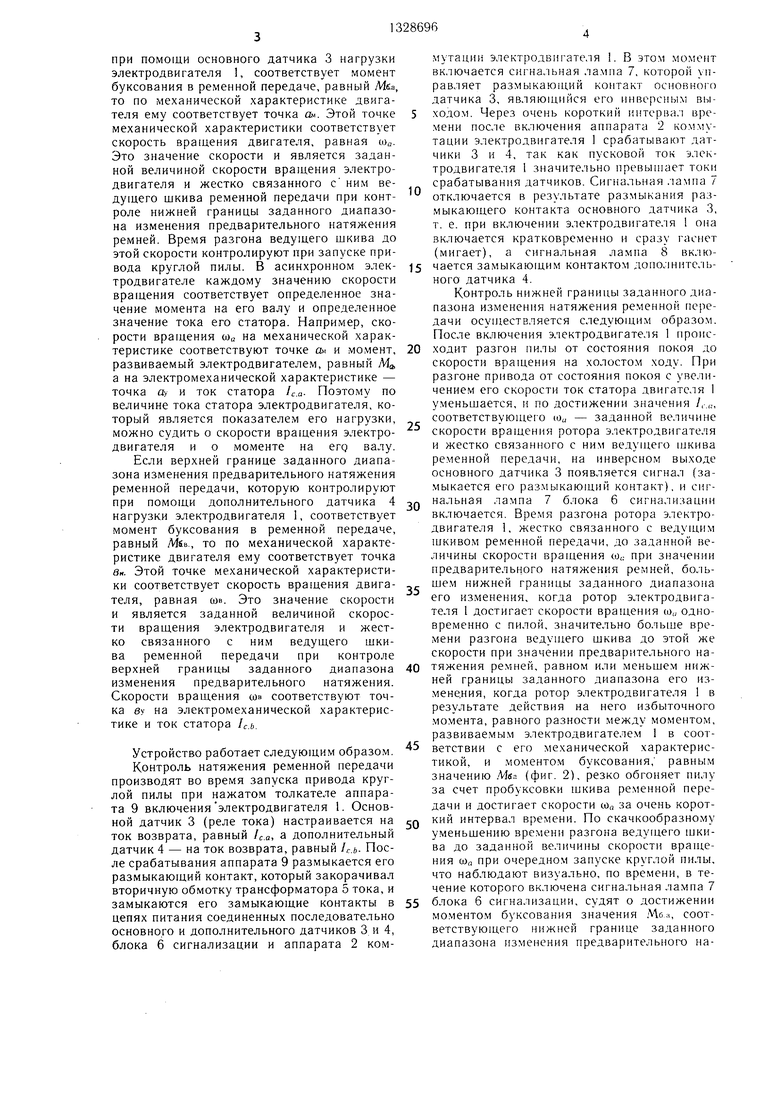
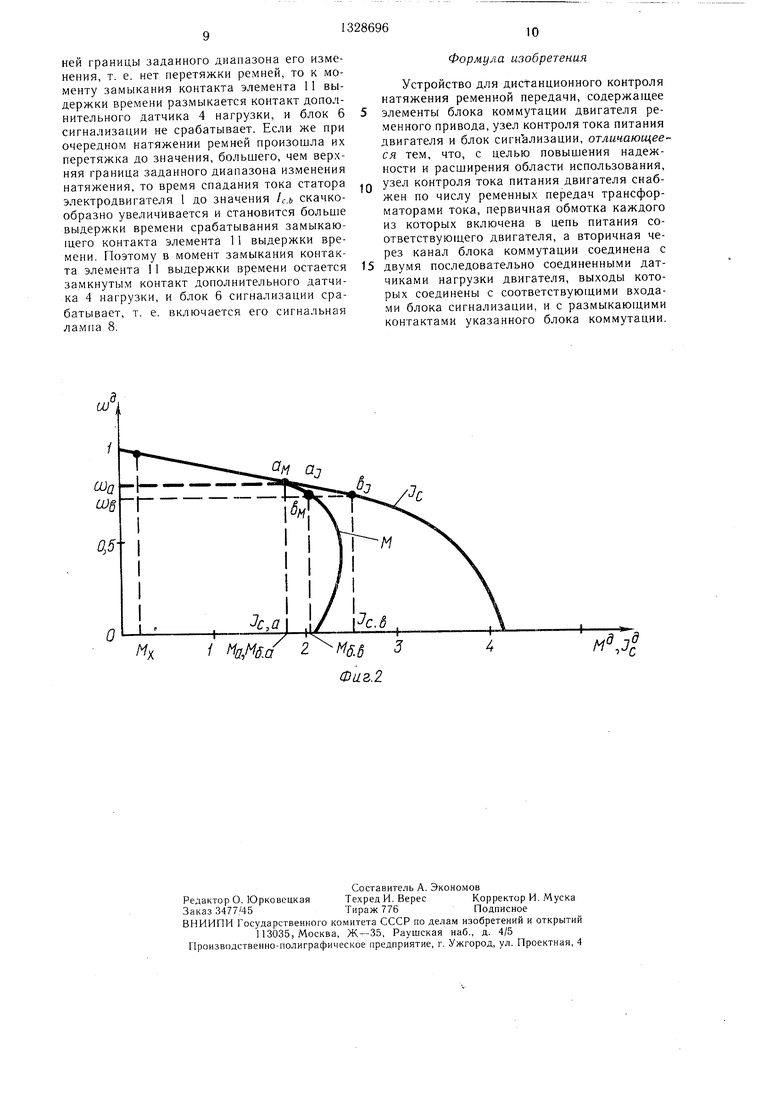
На фиг. 1 показано устройство для Дистанционного контроля натяжения ременной передачи привода круглой пилы двух- пильного распиловочного механизма, вариант выполнения; на фиг. 2 - типовые механическая и электромеханическая характеристики асинхронного электродвигателя с повышенным скольжением.
Устройство для дистанционного контроля натяжения ременной передачи привода, например, левой пилы двухпильного механизма включает электродвигатель 1 ременного привода (например, асинхронный электродвигатель с повышенным скольжением), аппарат 2 коммутации электродвигателя 1 (магнитный пускатель), основной и дополнительный датчики 3 и 4 нагрузки электродвигателя 1 (реле тока), трансформатор 5 тока, блок 6 сигнализации, выполненный, например, с сигнальными лампами 7 и 8, аппарат 9 включения электродвигателя 1 (многоконтактная кнопка). Кроме того, устройство может включать элементы 10 и 11 выдержки времени (реле времени). Аппарат 12 (кнопка) служит дЛя отключения электродвигателя 1.
На фиг. 1 обозначены также электродвигатель 13 ременного привода правой пилы, аппарат 14 коммутации электродвигателя 13, трансформатор 15 тока, аппарат 16 включения электродвигателя 13 и аппарат 17 для отключения последнего.
Основной и дополнительный датчики 3 и 4 нагрузки электродвигателя 1 соединены между собой последовательно и подключены к вторичной обмотке трансформатора 5 тока при помощи замыкающего контакта аппарата 9. Первичная обмотка трансформатора . 5 тока включена в цепь питания электродвигателя 1. Параллельно цепи контроля нагрузки электродвигателя I, включающей датчики 3 и 4, а также замыкающий контакт аппарата 9, к выводам вторичной обмотки трансформатора 5 тока подключен размыкающий контакт аппарата 9. Инверсный выход основного датчика 3 (прямой выход датчика не показан), выполненный в виде размыкающего контакта, подключен к первому входу блока 6 сигнализации, который управляет сигнальной лампой 7. Прямой выход дополнительного датчика 4 (инверсный выход датчика не показан), выполненный в виде замыкающего контакта, подключен к второму входу блока 6 сигнализации, который управляет сигнальной лампой 8.
При выполнении устройства с дополнительными двумя элементами выдержки вре- мени (на фиг. 1 показано пунктирными линиями) инверсный выход элемента 10 выдержки времени, выполненный в виде размыкающего контакта, соединен с инверсным выходом основного датчика 3 по схеме И, к
выходу которой подключен первый вход блока 6 сигнализации, управляющий сигнальной лампой 7. Прямой выход элемента 11 выдержки времени, выполненный в виде замыкающего контакта, соединен с прямым выходом дополнительного датчика 4 по схеме И,
5 к выходу которой подключен второй вход блока 6 сигнализации, управляющий сигнальной лампой 8. Входы элементов 10 и 11 выдержки времени подключены параллельно к цепи питания при помощи замыкающих контактов аппарата 2 коммутации электро0 двигателя 1.
Размыкающий контакт аппарата 12 включен последовательно в цепь питания аппарата 2.
Для дистанционного контроля натяжения
5 ременной передачи привода правой пилы подключение датчиков 3 и 4 нагрузки к трансформатору 15 тока и элементов 10 и 11 выдержки времени к цепи питания соответствует аналогично описанному, при этом аппарату 9 соответствует аппарат 16, аппаQ рату 2 - аппарат 14, а аппарату 12 - аппарат 17.
При поперечной распиловке древесины (фиг. 1) для привода круглой пилы, обладающей значительным моментом инерции, который- во много раз превышает момент
5 инерции ротора электродвигателя ее привода, применяют асинхронный двигатель с повышенным скольжением, учитывая, что пила работает в перемежающемся режиме с ударно-пиковыми нагрузками. На фиг. 2 представлена механическая характеристика
0 этого двигателя в относительных координатах Мои шб, где Л1э - относительное значение момента, развиваемого двигателем; сод - относительное значение скорости его вращения. Электромеханическая характеристика представлена в относительных координатах 1с и О), где / - относительное значение тока статора электродвигателя. В качестве базовых приняты для « синхронная скорость вращения, для М и / номинальные значения соответствующих величин.
0 На оси абсцисс откладываются также относительные значения моментов буксования в ременной передаче, которые соответствуют различным значениям предварительного натяжения ремней. При этом за базовую величину принят также номинальный момент
5 электродвигателя привода круглой пилы. Если нижней границе заданного диапазона изменения предварительного натяжения ременной передачи, которое контролируют
при помощи основного датчика 3 нагрузки электродвигателя , соответствует момент буксования в ременной передаче, равный Меа, то по механической характеристике двигателя ему соответствует точка Ом. Этой точке механической характеристики соответствует скорость вращения двигателя, равная Ша. Это значение скорости и является заданной величиной скорости вращения электродвигателя и жестко связанного с ним ведущего шкива ременной передачи при контроле нижней границы заданного диапазона изменения предварительного натяжения ремней. Время разгона ведущего шкива до этой скорости контролируют при запуске привода круглой пилы. В асинхронном элек- тродвигателе каждому значению скорости вращения соответствует определенное значение момента на его валу и определенное значение тока его статора. Например, скорости вращения на механической характеристике соответствуют точке а и момент, развиваемый электродвигателем, равный Ма, а на электромеханической характеристике - точка fly и ток статора Ic.a- Поэтому по величине тока статора электродвигателя, которыи является показателем его нагрузки,
можно судить о скорости вращения электродвигателя и о моменте на erg валу. Если верхней границе заданного диапазона изменения предварительного натяжения ременной передачи, которую контролируют при помощи дополнительного датчика 4 нагрузки электродвигателя , соответствует момент буксования в ременной передаче, равный Mss., то по механической характеристике двигателя ему соответствует точка вн. Этой точке механической характеристики соответствует скорость вращения двига- теля, равная шв. Это значение скорости и является заданной величиной скорости вращения электродвигателя и жестко связанного с ним ведущего шкива ременной передачи при контроле верхней границы заданного диапазона изменения предварительного натяжения. Скорости вращения ыв соответствуют точка ву на электромеханической характеристике и ток статора 1с.ь.
Устройство работает следующим образом.
Контроль натяжения ременной передачи производят во время запуска привода круглой пилы при нажатом толкателе аппарата 9 включения электродвигателя 1. Основной датчик 3 (реле тока) настраивается на ток возврата, равный Ic.a, а дополнительный датчик 4 - на ток возврата, равный /с.б. После срабатывания аппарата 9 размыкается его размыкающий контакт, который закорачивал вторичную обмотку трансформатора 5 тока, и замыкаются его замыкающие контакты в цепях питания соединенных последовательно основного и дополнительного датчиков 3 и 4, блока 6 сигнализации и аппарата 2 ком0
5 5 0
5
п 0
мутации электродвигателя 1. В этом момент включается сигнальная лампа 7, которой управляет размыкающий контакт основного датчика 3, являющийся его инверсным выходом. Через очень короткий интерва. времени после включения аппарата 2 коммутации электродвигателя 1 срабатывают датчики 3 и 4, так как пусковой ток электродвигателя 1 значительно превышает токи срабатывания датчиков. Сигнальная . laNuia 7 отключается в результате размыкания размыкающего контакта основного датчика 3, т. е. при включении электродвигателя 1 она включается кратковременно и сразу гаснет (мигает), а сигнальная лампа 8 включается замыкающим контактом дополнительного датчика 4.
Контроль нижней границы заданного диапазона изменения натяжения ременной передачи осу1 1ествляется следующим образом. После включения электродвигате. 1я 1 происходит разгон пилы от состояния покоя до скорости вращения на холостом ходу. При разгоне привода от состояния покоя с уве.н- чением его скорости ток статора двигателя 1 уменьщается, и по достижении значения /,.,.,, соответствующего ю,, - заданной величине скорости вращения ротора электродвигателя и жестко связанного с ним ведущего шкива ременной передачи, на инверсном выходе основного датчика 3 появляется сигнал (замыкается его размыкающий контакт), и сигнальная лампа 7 блока 6 сигнализации включается. Время разгона ротора электродвигателя 1, жестко связанного с ведущим ц;кивом ременной передачи, до заданной величины скорости вращения со,., при значении предварительного натяжения ремней, большем нижней границы заданного диапазона его изменения, когда ротор электродвигателя 1 достигает скорости вращения со„ одновременно с пилой, значительно больше времени разгона ведущего шкива до этой же скорости при значении предварительного натяжения ремней, равном или меньшем нижней границы заданного диапазона его изменения, когда ротор электродвигателя 1 в результате действия на него избыточного момента, равного разности между моментом, развивае.мым электродвигателем 1 в соответствии с его механической характеристикой, и моментом буксования, равным значению Msz (фиг. 2), резко обгоняет пилу за счет пробуксовки шкива ременной передачи и достигает скорости сОд за очень короткий интервал времени. По скачкообразному уменьшению времени разгона ведущего ва до заданной величины скорости вращения Ша при очередном запуске круглой пилы, что наблюдают визуально, по времени, в течение которого включена сигнальная лампа 7 блока 6 сигнализации, судят о достижении моментом буксования значения Моа, соответствующего нижней границе заданного диапазона изменения предварительного натяжения ременной нередачи. Время разгона ведущего ншива, жестко связанного с валом двигателя, до скорости вращения при значении предварительного натяжения ремней, болыним значения нижней границы заданного диапазона его изменения, составляет примерно 3,5-4,0 с, а при значении предварительного натяжения ремней, равном или менынем нижней границы заданного диапазона его изменения, составляет примерно 0,3 с. Следовательно, в первом случае при запуске привода сигнальная лампа 7 вначале мигнет, а затем не включается в те- .чение всего времени запуска. Во втором случае при запуске сигнальная лампа 7 вначале мигнет, а затем сразу (примерно через 0,3 с) включается и остается включенной в течение всего времени запуска привода пилы и после запуска, если оператор продолжает удерживать толкатель аппарата 9. Инверсный выход основного датчика 3 нагрузки электродвигателя 1 выбран с той целью, чтобы при ослаблении предварительного натяжения ремней передачи до значения, равного или меньшего, чем нижняя граница заданного диапазона его изменения, возникал длительный сигнал блока 6 сигнализации, т. е. происходило длительное включение сигнальной лампы 7 при запуске привода пилы.
Принципиально возможен контроль и с отсутствием сигнала, т. е. с отсутствием включения сигнальной лампы 7 при ослаблении предварительного натяжения ремней до значения, равного или меньшего, чем нижняя контролируемая граница заданного диапазона его изменения (сигнальная лампа 7 включена при запуске привода, если значение предварительного натяжения ремней больше нижней границы заданного диапазона его изменения). В этом случае используют прямой выход датчика 3.
Благодаря выполнению основным датчиком 3 функции контроля нижней границы заданного диапазона изменения предварительного натяжения ремней обеспечивается работа ременного привода круглой пилы без буксования на рабочем участке механической характеристики электродвигателя , т. е. при изменении момента электродвигателя от момента холостого хода М до момента Ма, развиваемого электродвигателем в точке а„ механической характеристики (фиг. 2).
Контроль верхней границы заданного диапазона изменения натяжения ременной передачи осуществляется при значении заданной величины скорости вращения ротора электродвигателя и жестко связанного с ним ведущего шкива ременной передачи, равном (Ов. По времени разгона ротора от состояния покоя до скорости вращения ш при очередном запуске привода пилы судят о превышении предварительным натяжением ремней верхней границы заданного диапа0
5
0
5
0
5
0
5
0
5
зона его изменения. Во время разгона привода пилы от состояния покоя с увеличением его скорости уменьшается ток статора электродвигателя 1, и по достижении им значения /с.в происходит изменение состояния дополнительного датчика 4. На его прямом выходе сигнал исчезает (размыкается его замыкающий контакт), и сигнальная лампа 8 блока 6 сигнализации отключается. Если при очередном запуске привода пилы значение предварительного натяжения ременной передачи равно или меньше верхней границы заданного диапазона его изменения, то сигнальная лампа 8 при запуске только кратковременно включается (мигнет) и далее остается отключенной. Кратковременное ее включение происходит в результате срабатывания дополнительно датчика 4 от пускового тока электродвигателя 1, а затем в результате действия на ротор избыточного момента ведущий шкив передачи за счет пробуксовки резко обгоняет пилу и достигает скорости вращения сов за очень короткий интервал времени (примерно за 0,3 с). Если при очередном запуске привода пилы значение предварительного натяжения ременной передачи больше, чем верхняя граница заданного диапазона его изменения, т. е. имеет место перетяжка ремней, то значение момента буксования в ременной передаче больше че.м .B. В этом случае ротор электродвигателя 1 и пила одновременно достигают скорости вращения сов, а следовательно, разгон ротора электродвигателя длится намного дольше, чем в предыдущем случае. С включением электродвигателя 1 дополнительный датчик 4 срабатывает от пускового тока, на его прямом выходе, выполненном в виде замыкающего контакта, появляется сигнал, который включает сигнальную лампу 8. Последняя остается включенной достаточно длительное время, равное примерно 2,5-3,0 с, что несколько меньше, чем указанное для нижней границы время, равное примерно 3,5-4,0 с, так как
, а Л1йв.Мб.а.
В течение этого времени пила и двигатель разгоняются и совместно достигают скорости вращения ыв. При этом ток статора электродвигателя 1 становится равным 1с.ь и сигнал на выходе дополнительного датчика 4 исчезает, т. е. замыкающий контакт датчика 4 размыкается. Сигнальная лампа 8 отключается и далее остается отключенной независимо от длительности удержания оператором толкателя аппарата 9 в нажатом состоянии. Прямой выход дополнительного датчика 4 нагрузки электродвигателя 1 выбран с той целью, чтобы при перетяжке ремней возникал длительный сигнал блока 6 сигнализации, т. е. происходило длительное включение сигнальной лампы 8 при очередном запуске привода пилы. Принципильно возможен контроль и с использованием инверсного выхода датчика 4.
В рассматриваемом варианте выполнения устройства для датчиков 3 и 4 приняты такие взаимно инверсные выходы, чтобы при достижении предварительным натяжением ременной передачи нижней границы заданного диапазона его изменения или при выходе натяжения за контролируемые границы имело место длительное включение сигнальных ламп блока 6 сигнализации. Если же значение предварительного натяжения ременной передачи равно верхней границе заданного диапазона его изменения или находится между границами заданного диапазона, то сигнальные лампы блока 6 сигнализации, контролирующие границы диапазона, при запуске привода пилы только очень кратковременно включаются и далее остаются отключенными в течение всего времени запуска привода пилы.
В тех случаях, когда приведенный к валу электродвигателя момент инерции элементов ременного привода, жестко связанных с ведомым шкивом, и приведенный момент инерции элементов привода, жестко связанных с ведущим шкивом, находятся между собой в таком соотношении, что визуально нельзя надежно контролировать разницу во времени разгона ведущего шкива до заданных значений скорости вращения Оа и Ш(, при натяжениях ременной передачи, соответствующих значениям заданного диапазона его изменения, и значениях натяжения, равных нижней границе заданного диапазона или находящихся за пределами его границ, то в устройство включаются элементы 10 и 11 выдержки времени.
В этом варианте выполнения устройство работает следующим образом. При нажатии на толкатель аппарата 9 подается питание на аппарат 2 коммутации электродвигателя 1, а датчики 3 и 4 подключаются к вторичной обмотке трансформатора 5 тока. С включением аппарата 2 подается напряжение на цепи питания электродвигателя 1, элементов 10 и 11 выдержки времени и на цепи управления блоком 6 сигнализации. В начальный момент до срабатывания датчиков 3 и 4 от пусковых токов электродвигателя 1 кратковременно включается сигнальная лампа 7 блока 6 сигнализации, которой управляет схема И, выполненная на размыкающих контактах основного датчика 3 нагрузки и э лемента 10 выдержки времени. Это свидетельствует об исправности цепи, по которой управляют работой сигнальной лампы 7. В момент подачи питания на электродвигатель 1 запитываются также катушки элементов 10 и 11 выдержки времени. Размыкающий контакт элемента 10 выдержки времени имеет выдержку времени при срабатывании несколько меньшую, чем время разгона ведущего шкива до заданной величины скорости вращения сод при предварительном натяжении ременной передачи, большем нижнего граничного значения заданного диапазона его изменения, которое контролируют при помощи сигнальной лампы
5 7. Замыкающий контакт элемента 11 выдержки времени имеет выдержку времени при срабатывании несколько большую, чем время разгона ведущего шкива до заданной величины скорости вращения ш/, при предвари,. тельном натяжении ременной передачи, равном верхнему граничному значению заданного диапазона его изменения, которое контролируют при помощи сигнальной лампы 8.
Контроль нижней границы заданного диа5 пазона изменения предварительного натяжения ременной передачи осуществляется следующим образом. При включении электродвигателя 1 привода пилы во время запуска срабатывает основной датчик 3 нагрузки, и его размыкающий контакт разры0 вает цепь управления сигнальной лампой 7. Во время разгона привода с увеличением его скорости вращения ток статора электродвигателя 1 уменьшается, и по достижении значения 7, соответствующего со,,, размы5 кающий контакт датчика 3 нагрузки, который настроен на ток возврата, замыкается. Если предварительное натяжение ременной передачи больще нижней границы заданного диапазона его изменения,-то к моменту замыкания контакта основного датчика 3 нагрузки
0 размыкается контакт элемента 10 выдержки времени, и блок 6 сигнализации не срабатывает. При ослаблении предварительного натяжения ременной передачи до значения, равного или меньшего нижней границы заданного диапазона его изменения, время спа5 Дания тока статора электродвигателя 1 до значения /см скачкообразно уменьшается и становится меньше выдержки времени срабатывания размыкающего контакта элемента 10. Поэтому в момент замыкания контакта датчика 3 нагрузки остается замкнутым
0 контакт элемента 10 выдержки времени, н блок 6 сигнализации срабатывает, т. е. включается его сигнальная лампа 7.
Контроль верхней границы заданного диапазона изменения натяжения ременной передачи осуществляется при значении заданной величины скорости вращения, равном Ыб. При включении электродвигателя 1 привода пилы во время запуска срабатывает дополнительный датчик 4 нагрузки и его
0 замыкающий контакт замыкается в цепи управления сигнальной лампой 8. Во время разгона привода с увеличением его скорости вращения ток статора электродвигателя 1 уменьшается, и по достижении значения 1с.ь, соответствующего шь, замыкающий
5 контакт датчика 4 нагрузки, который настроен на ток возврата, равный /,-(,,размыкается. Если предварительное натяжение ременной передачи равно или меньше верхней границы заданного диапазона его изменения, т. е. нет перетяжки ремней, то к моменту замыкания контакта элемента 11 выдержки времени размыкается контакт дополнительного датчика 4 нагрузки, и блок 6 сигнализации не срабатывает. Если же при очередном натяжении ремней произошла их перетяжка до значения, большего, чем верхняя граница заданного диапазона изменения натяжения, то время спадания тока статора электродвигателя I до значения 1с.ь скачкообразно увеличивается и становится больше выдержки времени срабатывания замыкающего контакта элемента 1 выдержки времени. Поэтому в момент замыкания контакта элемента 11 выдержки времени остается замкнутым контакт дополнительного датчика 4 нагрузки, и блок 6 сигнализации срабатывает, т. е. включается его сигнальная лампа 8.
Формула изобретения
Устройство для дистанционного контроля натяжения ременной передачи, содержащее
элементы блока коммутации двигателя ременного привода, узел контроля тока питания двигателя и блок сигн ализации, отличающееся тем, что, с целью повышения надежности и расширения области использования,
узел контроля тока питания двигателя снабжен по числу ременных передач трансформаторами тока, первичная обмотка каждого из которых включена в цепь питания соответствующего двигателя, а вторичная через канал блока коммутации соединена с
двумя последовательно соединенными датчиками нагрузки двигателя, выходы которых соединены с соответствующими входами блока сигнализации, и с размыкающими контактами указанного блока коммутации.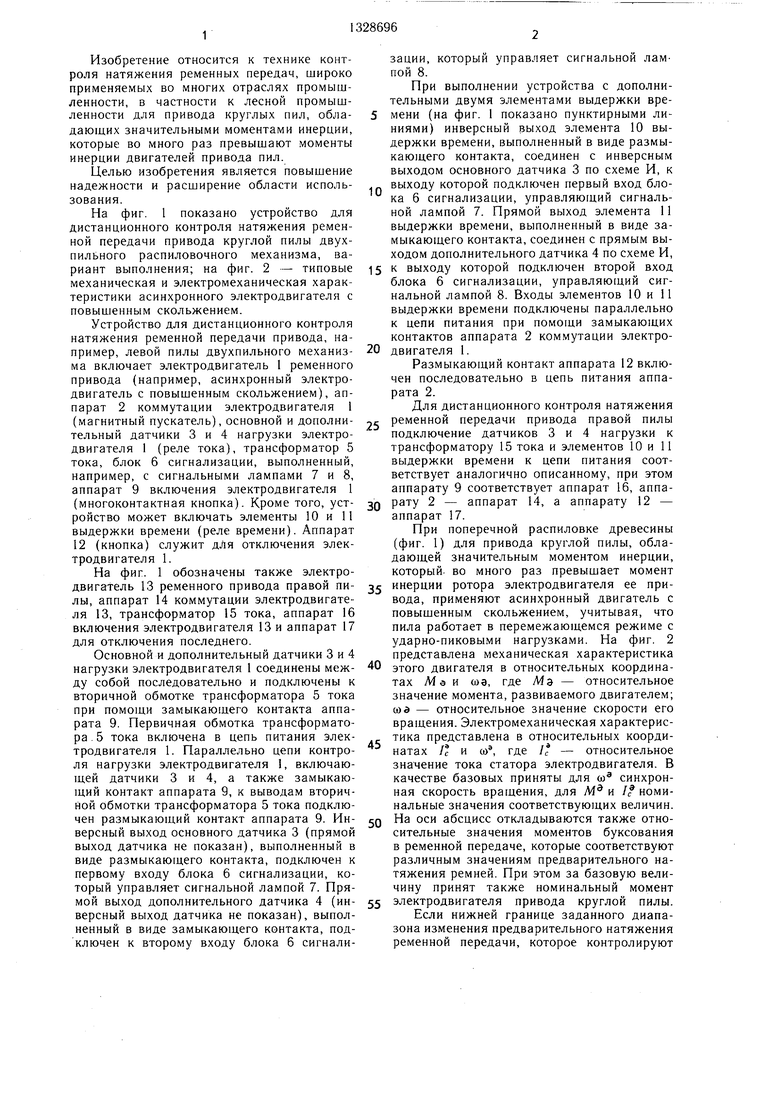
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля натяжения ременной передачи | 1974 |
|
SU593090A1 |
| Установка для фасонной обточки пуговиц | 1987 |
|
SU1613354A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| Сигнально-автоматическая следящая система регулирования рабочего процесса сельскохозяйственных машин | 1958 |
|
SU123788A1 |
| Автоматизированный многопильный станок | 1983 |
|
SU1130458A1 |
| Устройство для автоматического управления системой дымоудаления | 1973 |
|
SU475646A1 |
| Устройство для контроля превышения допустимой скорости автомобиля | 1979 |
|
SU937247A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАХТНЫМИ КОНВЕЙЕРНЫМИ ЛИНИЯМИ | 1968 |
|
SU208070A1 |
| Устройство для безударного пуска трехфазного асинхронного электродвигателя | 1990 |
|
SU1798879A1 |
| Устройство для сигнализации о состоянии механизмов | 1981 |
|
SU966716A1 |
Изобретение может найти применение в лесной промышленности для привода круглых пил, обладающих значительными моментами инерции, превышаю1цими моменты инерции двигателей привода пил. Цель изобретения - повышение надежности и расширение области использования. Если предварительное натяжение ременной передачи равно или меньше верхней границы заданного диапазона его изменения, т. е. нет перетяжки ремней, то к моменту замыкания контакта элемента 11 выдержки времени размыкается контакт датчика 4 нагрузки, и блок 6 сигнализации не срабатывает. Если при очередном натяжении ремней произошла их перетяжка до значения, большего, чем верхняя граница заданного диапазона изменения натяжения, то время спадания тока статора электродвигателя 1 скачкообразно увеличится и станет больше выдержки времени срабатывания замыкающего контакта элемента 11 выдержки времени. В момент замыкания контакта элемента 1 1 выдержки времени останется замкнутым контакт датчика 4 нагрузки и блок 6 сигнализации сработает, т. е. включится его сигнальная лампа 8. 2 ил. to (Л со Ю 00 Gi со Oi
Ш
М
1г
| Авторское свидетельство СССР № 491849, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля натяжения ременной передачи | 1974 |
|
SU593090A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
