Изобретение относится к системам автоматического управления транспортными средствами, передвигающимися вдоль индукционного провода, и может быть использовано, например, для уп- равления внутрицеховыми робокарами в гибком автоматизированном производстве .
Цель изобретения - расширение функ- д циональных возможностей устройства за счет определения его поперечного и углового смещения.
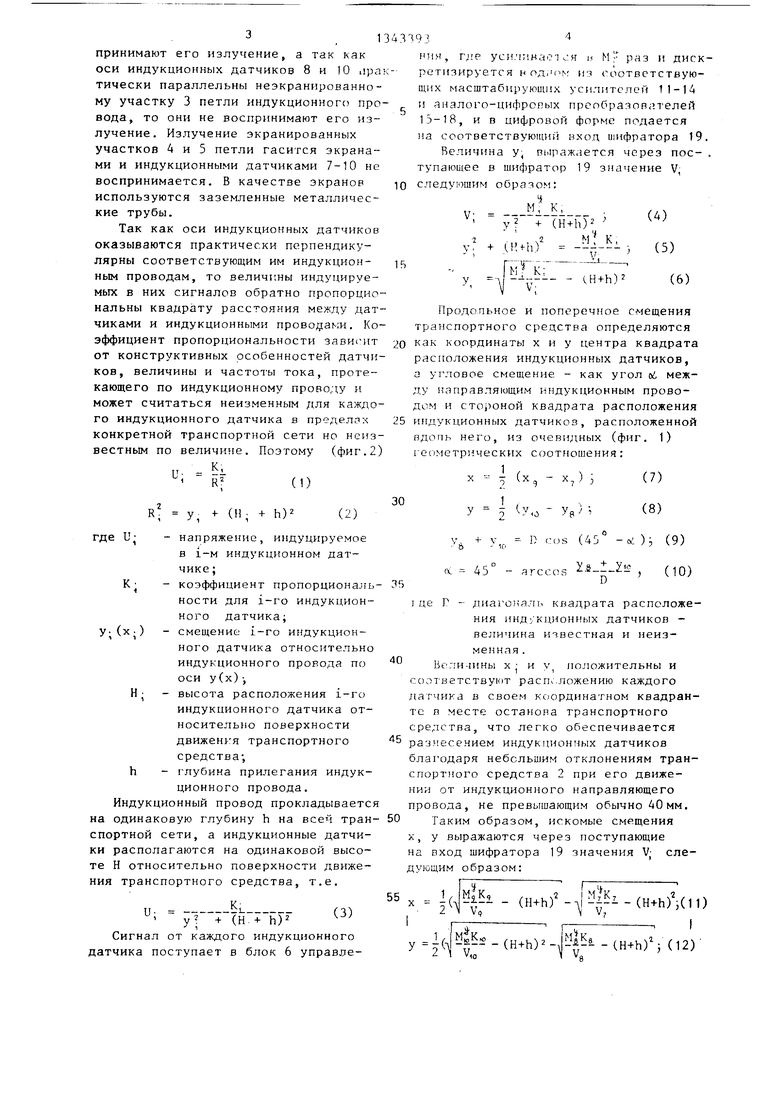
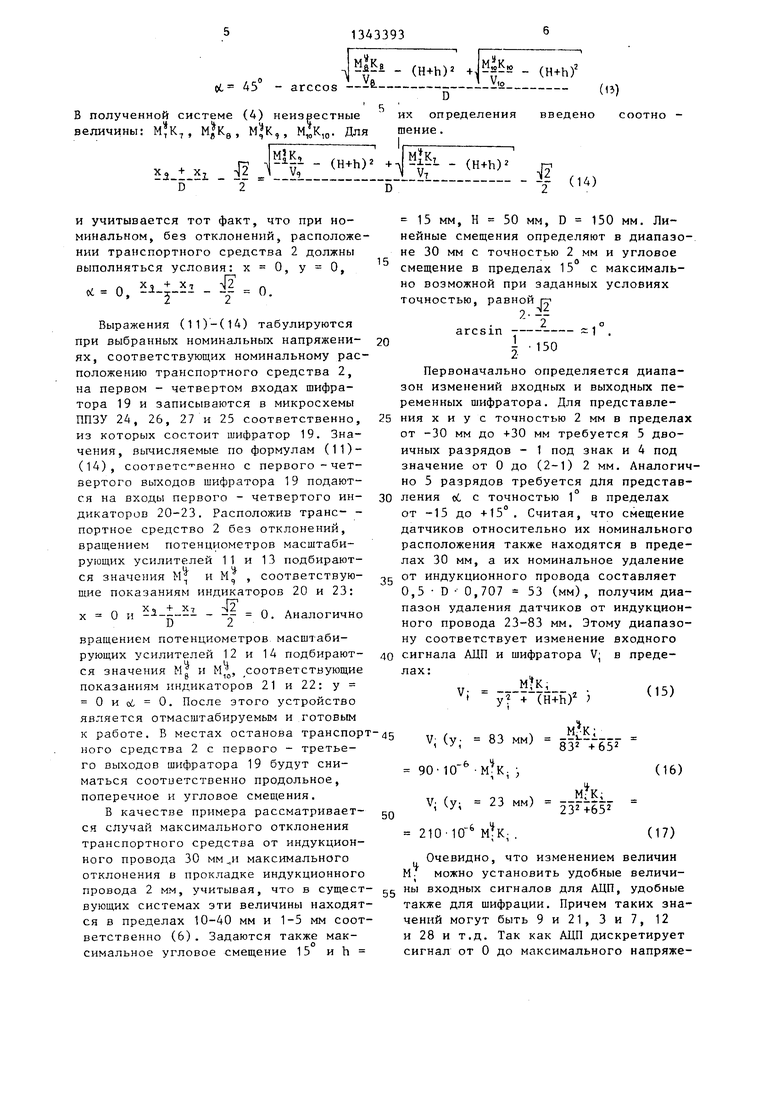
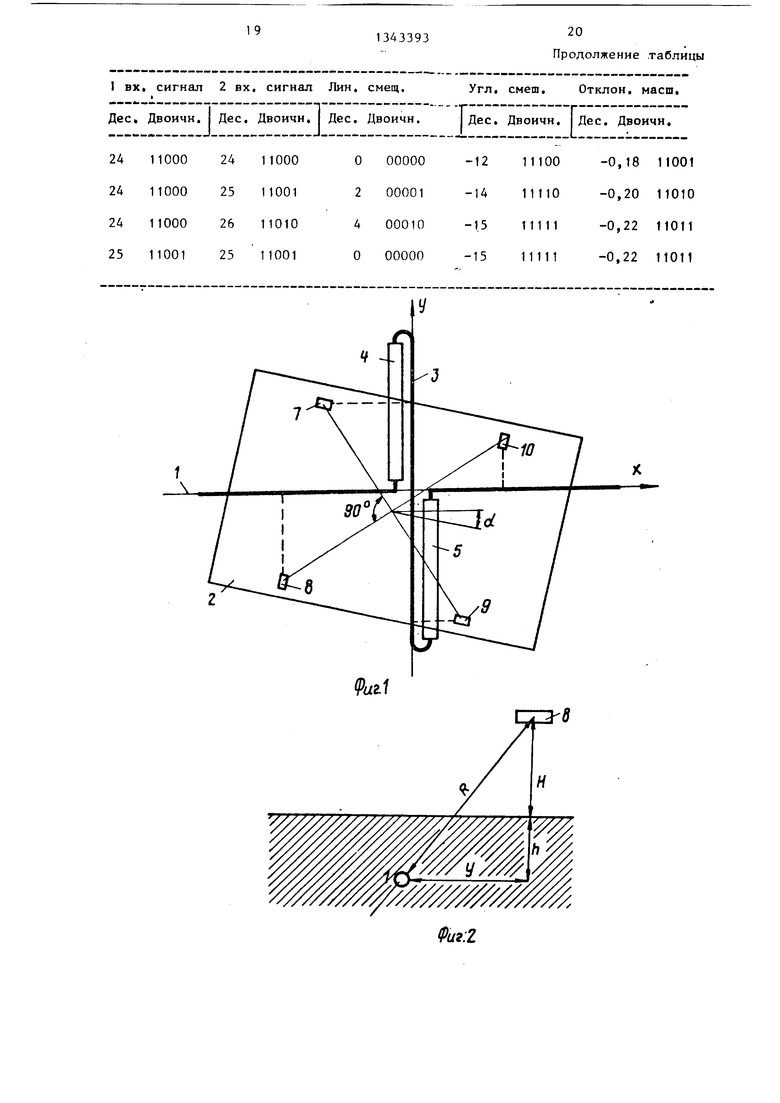
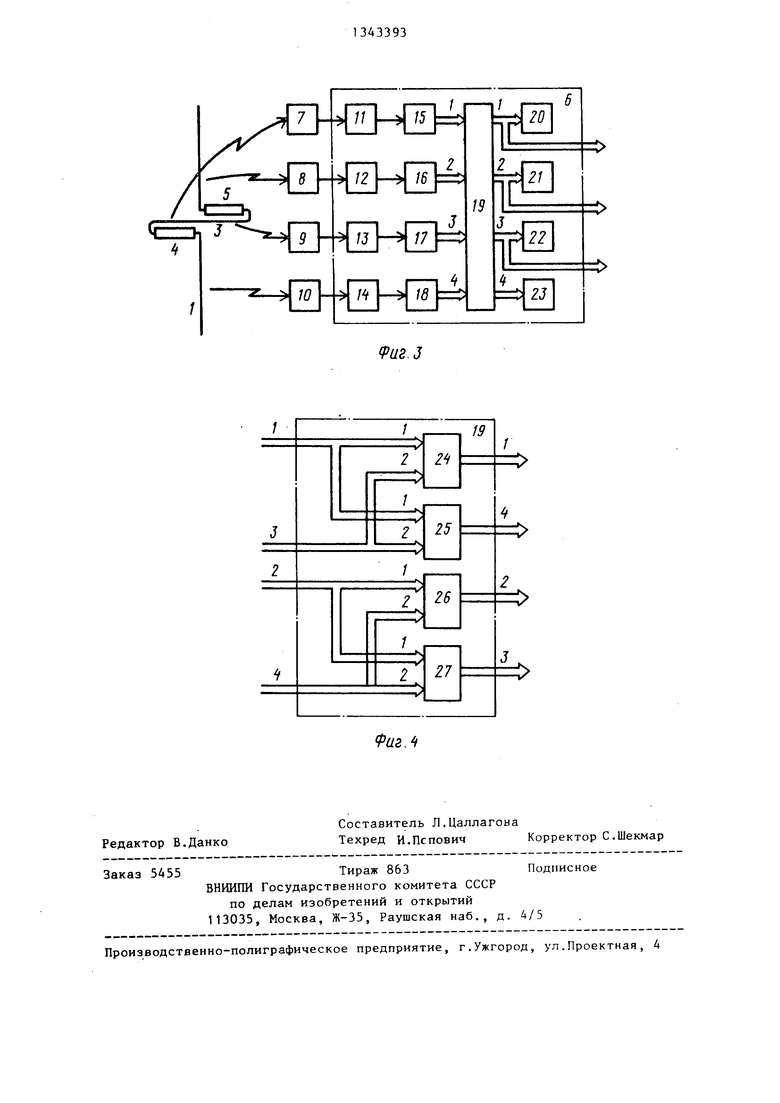
На фиг. 1 изображено расположение транспортного средства с индукционными датчиками на его борту в месте останова; на фиг. 2 - направляющий индукционный кабель с расположением индукционного датчика, поперечный разрез; на фиг. 3 - функциональная схе- 20 ма устройства для определения положения транспортного средства; на фиг.4- пример реализации шифратора.
Направляющий индукционный провод 1 в месте возможного останова транспортного средства 2 имеет петлю, содержащую один- перпендикулярный направляющему индукционному проводу неэкранированный участок 3 и два экранированных участка 4 и 5, на транспортном средстве 2 установлены блок 6 управления и первый - четвертый индукционные датчики 7-10 соответственно, блок 6 управления содержит первый - четвертый масштабирующие усилители 11-14 соответственно, первый - червертый аналого-цифровые преобразователи 15-18 соответственно, шифратор 19 и первый - четвертый индикачетвертого масштабирующих усилителей 11-14, выходы которых подключены соответственно к входам первого - четвертого цифроаналоговых преобразователей 15-18, выходы которых соединены с первым - четвертым входами шифратора 19 соответственно, первый - четвертый выходы которого подключены к входам первого - четвертого индикатора 20-23 соответственно, а первый - третий выходы являются выходами устройства .
Первые входы первой и второй мик- 15 росхем ППЗУ 24 и 25 совпадают с первым входом шифратора 19, их вторые входы - с его третьим входом,.а выходы микросхем ППЗУ 24 и 25 являются соответственно первым и четвертым выходами шифратора 19. Первые входы третьей и четвертой микросхем ППЗУ 26 и 27 совпадают с вторым входом шифратора 19, их вторые входы - с его четвертым входом, а выходы микросхем ППЗУ 26 и 27 являются соответственно вторым и третьим выходами шифратора 19.
Устройство работает следующим образом.
При движении или расположении транспортного средства 2 вдоль направляющего индукционного провода 1 излучение от этого провода воспринимается индукционными датчиками 8 и 10, так как их оси перпендикулярны продольной оси транспортного средства 2 и, следовательно, практически
25
30
35
перпендикулярны индукционному направляющему проводу. Так как основу ин- торы 20-23 соответственно, а шифратор . дукционных датчиков составляет катуш- выполнен на четырех микросхемах ППЗУ ка индуктивности или соленоид, то сиг24-27.
Экранированные участки 4 и 5 соединяют концы неэкранированного участка 3 с индукционным проводом 1, а индукционные датчики 7-10 расположены в вершинах квадрата, две стороны которого параллельны продольной оси транспортного средства 2, оси двух индукционных датчиков 7 и 9, определяющих одну диагональ квадрата, па- паллельны продольной оси транспортного средства 2, а оси индукционных датчиков 8 и 10 перпендикулярны этой оси.
Выходы индукционных датчиков 7-10 соединены с первым - четвертым входами блока 6 управления, которыми являются соответственно входы первого
четвертого масштабирующих усилителей 11-14, выходы которых подключены соответственно к входам первого - четвертого цифроаналоговых преобразователей 15-18, выходы которых соединены с первым - четвертым входами шифратора 19 соответственно, первый - четвертый выходы которого подключены к входам первого - четвертого индикатора 20-23 соответственно, а первый - третий выходы являются выходами устройства .
Первые входы первой и второй мик- росхем ППЗУ 24 и 25 совпадают с первым входом шифратора 19, их вторые входы - с его третьим входом,.а выходы микросхем ППЗУ 24 и 25 являются соответственно первым и четвертым выходами шифратора 19. Первые входы третьей и четвертой микросхем ППЗУ 26 и 27 совпадают с вторым входом шифратора 19, их вторые входы - с его четвертым входом, а выходы микросхем ППЗУ 26 и 27 являются соответственно вторым и третьим выходами шифратора 19.
Устройство работает следующим образом.
При движении или расположении транспортного средства 2 вдоль направляющего индукционного провода 1 излучение от этого провода воспринимается индукционными датчиками 8 и 10, так как их оси перпендикулярны продольной оси транспортного средства 2 и, следовательно, практически
нал, воспринимаемый индукционным датчиком от проводника с переменным током, пропорционален косинусу угла между осью датчика и направлением
проводника, а также обратно пропорционален квадрату расстояния между датчиком и проводником. В местах возможного останова транспортного средства индукционные датчики 7 и 9 воспринимают сигнал от неэкранированного участка 3 петли индукционного провода, так как их оси параллельны продольной оси транспортного средства 2 и практически перпендикулярны незкра0
5
нированному участку петли. Ввиду того, что оси индукционных датчиков 7 и 9 практически параллельны направляющему индукционному проводу 1, они не воепринимают его излучение, а так как оси индукционных датчиков 8 и 10 .фатически параллельны неэкранированному участку 3 петли индукционного провода, то они не воспринимают его излучение. Излучение экранированных участков 4 и 5 петли гасится экранами и индукционными датчиками 7-10 не воспринимается. В качестве экранов используются заземленные металлические трубы.
Так как оси индукционных датчиков оказываются практически перпендикулярны соответствующим им ИНДУКЦИОН-
ным проводам, то величины индуцируемых в них сигналов обратно пропорциональны квадрату расстояния между датчиками и индукционными проводаьш. Коэффициент пропорциональности зави(Ч1т от конструктивных особенностей датчиков, величины и частоты тока, протекающего по индукционному проводу и может считаться неизменным для каждого индукционного датчика в пределг1х конкретной транспортной сети но неизвестным по величине. Поэтому (фиг.2)
KI R
и,
(1)
R.
У,
+ (И- + h)2
и,
ji
-напряжение, индуцируемое в i-M индукционном датчике ;
-коэффициент пропорциональности для i-ro индукционного датчика;
(х) - смещение i-ro индукционного датчика относительно индукционного провода по оси у(х)-,
Н; - высота расположения i-ro индукционного датчика относительно поверхности движенр я транспортного средства-,
h - глубина прилегания индукционного провода.
Индукционный провод прокладывается одинаковую глубину h на всей транртной сети, а индукционные датчирасполагаются на одинаковой высоН относительно поверхности движетранспортного средства, т.е.
U; - yi--(-;-hF (3)
Сигнал от каждого индукционного датчика поступает в блок 6 управле
ю IP,
2025
3 9 34
ния, ГДР уси-чинается i М- раз и диск- ретизируется в oдJ n ; из соответствующих масштабирующих усилителей 11-14 и аналого-цифровых прсобразовр.телей 15-18, и в цифровой форме подается на соответствующий вход шифратора 19. Величина у; выражается через пос- . тупающее в шифратор 19 значение V, следу:ошим образом:
+ (H+iO
(,н„) -yi
7F
- (.H+h)2
V:
у
, 2
(4) (5)
у
Гм к: - --.
(6)
Продольное и поперечное смещения транспортного средства определяются как координаты х и у центра квадрата расположения индукционных датчиков, а угловое смещение - как угол cvi между направляющим индукционным проводом и стороной квадрата расположения индукционных датчиков, расположенной пдопь него, из очевидных (фиг. 1) гeo eтpичecкиx соотношения:
- (х 9 Э
- о
&
а 45
ч);(7)
-yg);(8)
cos (45° )j (9) (10)
Ув У|Д arccos J
0
5
0
Iде Г - диагональ квадрата расположения индукционных датчиков - величина известная и неизменная .
Вс ЛИ-П1ны X j и у положительны и соот ветствуют pacп,лoжeнию каждого датчика в своем координатном квадранте в месте останова транспортного средства, что легко обеспечивается разнесением индукционных датчиков благодаря небольшим отклонениям транспортного средства 2 при его движении от индукционного направляющего провода, не превышающим обычно 40мм.
Таким образом, искомые смещения X, у выражаются через поступающие на вход шифратора 19 значения V; следующим образом:
llSi (H4h) № - () ot 45° - arccos -- 8-l- o
(B)
в полученной системе (4) неизвестные их определения введено состно - величины: , , м|Кд , ,, М„К,о. Для шение.
ь -X и i lZr jf
-- 2 - - 5
и учитывается тот факт, что при номинальном, без отклонений, расположении транспортного средства 2 должны выполняться условия: х О, у О,
42
-2т
с О,
N
0.
Выражения (11)-(l4) табулируются при выбранных номинальных напряжениях, соответствующих номинальному расположению транспортного средства 2, на первом - четвертом входах шифратора 19 и записываются в микросхемы ППЗУ 24, 26, 27 и 25 соответственно, из которых состоит шифратор 19. Значения, вычисляемые по формулам (11)- (14), соответс- венно с первого - четвертого выходов шифратора 19 подаются на входы первого - четвертого индикаторов 20-23. Расположив транс- - портное средство 2 без отклонений, вращением потенциометров масштабирующих усилителей 11 и 13 подбираютЦ,U
ся значения М и М, , соответствующие показаниям индикаторов 20 и 23:
х, + XT -42 „ . X О и - -;:: - О. Аналогично
вращением потенциометров, масштабирующих усилителей 12 и 14 подбираютЦ h
ся значения М„ и М , соответствующие
D 1О
показаниям индикаторов 21 и 22: у О и с О. После зтого устройство является отмасштабируемым и готовым к работе. В местах останова транспорного средства 2 с первого - третьего выходов шифратора 19 будут сниматься соответственно продольное, поперечное и угловое смещения,
В качестве примера рассматривается случай максимального отклонения транспортного средства от индукционного провода 30 максимального отклонения в прокладке индукционного провода 2 мм, учитывая, что в существующих системах эти величины находятся в пределах 10-40 мм и 1-5 мм соответственно (6) . Задаются также максимальное угловое смещение 15 и h
(14)
15 мм, Н 50 мм, D 150 мм. Линейные смещения определяют в диапазоне 30 мм с точностью 2 мм и угловое смещение в пределах 15 с максимально возможной при заданных условиях точностью, равной гг 7 Jf
2 arcsinг1 .
01 .150
Первоначально определяется диапазон изменений входных и выходных переменных шифратора. Для представле5 ния X и у с точностью 2 мм в пределах от -30 мм до +30 мм требуется 5 двоичных разрядов - 1 под знак и 4 под значение от О до (2-1) 2 мм. Аналогично 5 разрядов требуется дЛя представ0 ления об с точностью 1° в пределах от -15 до +15 . Считая, что смещение датчиков относительно их номинального расположения также находятся в пределах 30 мм, а их номинальное удаление
g от индукционного провода составляет 0,5 D 0,707 53 (мм), получим диапазон удаления датчиков от индукционного провода 23-83 мм. Этому диапазону соответствует изменение входного
0 сигнала АДП и шифратора V в пределах:
У;
5
у| + (H+h) ;
,
(15)
V; (у; 83 мм)
.L. - 332 +652
90 10
.-ь
.
(16)
V; (у; 23 мм)
21010 . .
,
(17)
Очевидно, что изменением величин М. можно установить удобные величи- gg ны входных сигналов для АЦП, удобные также для шифрации. Причем таких значений могут быть 9 и 21, 3 и 7, 12 и 28 и т.д. Так как АЦП дискретирует сигнал от О до максимального напряжения, a под входной сигнал необходимо отвести 5 разрядов, выбирается максимальное дискретное значение выходного сигнала АЦП 32 ед. с рабочим диапазоном 12-28. Приняв номинальное значение V, равным 0,5 (12129) 20, получим:
У;,.у;н + (П + h/l 20-(532 -1-652) 140680 . (18)
При масштабировании,несмотря на неизвестные значения К;,все М. устанавливают равными -- 140680, что
К1
й 45 arccos (
140680 Д225 + (
X, . X, Г-Л - - 22 D 2 150Т
Так как каждая из четырех вычисляемых величин зависит только от двух входных величин, то таблицу значений выходных величин достаточно просчитать для различных значений только одной пары входных величин в требуе- йом диапазоне, т.е. когда выполняются условия принадлежности входных сигналов диапазону 12-28 ед., а вычисляемое значение об не выходит за пределы (-15) - (+15)° . Наполовину сокращают таблиду следующие свойства:
V,) -x(v,, V,) ;
vj -y(v,, Ve); w „y /u j
V.);
(23)
(24) (25)
+ X7
D
if(v
2
9
V.).
(26)
Это позволяет вычислять табличные значения только для случаев, когда первая входная величина не превышает вторую входную величину.
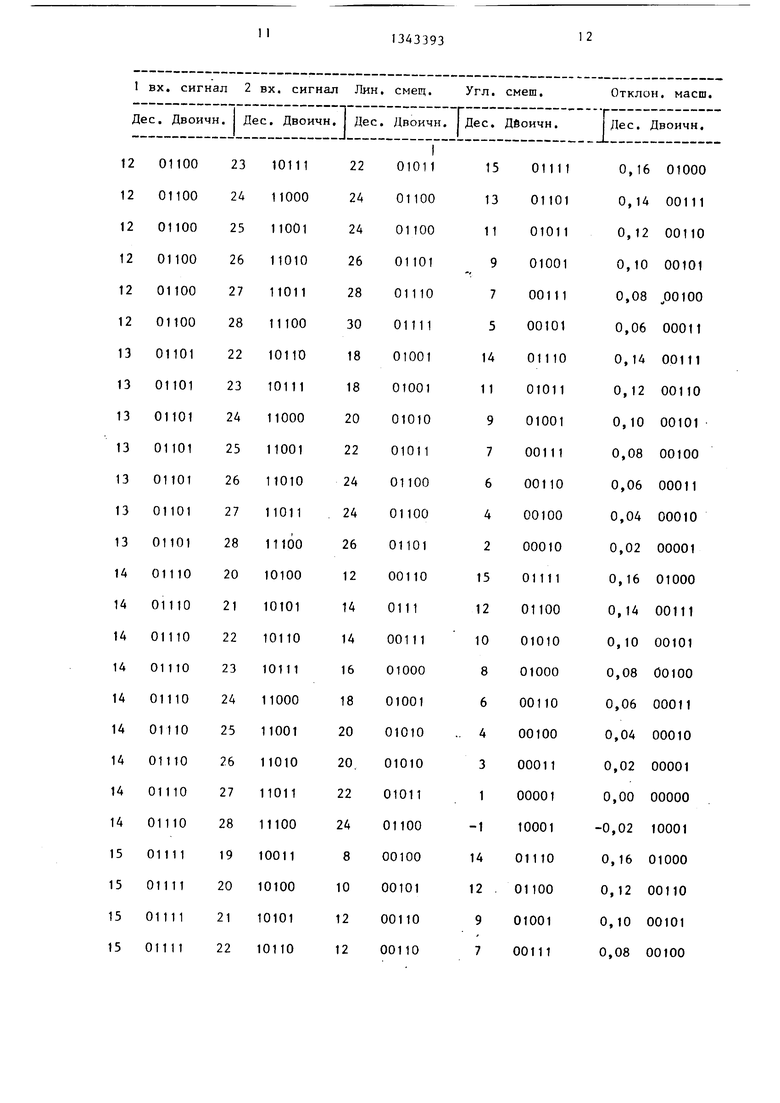
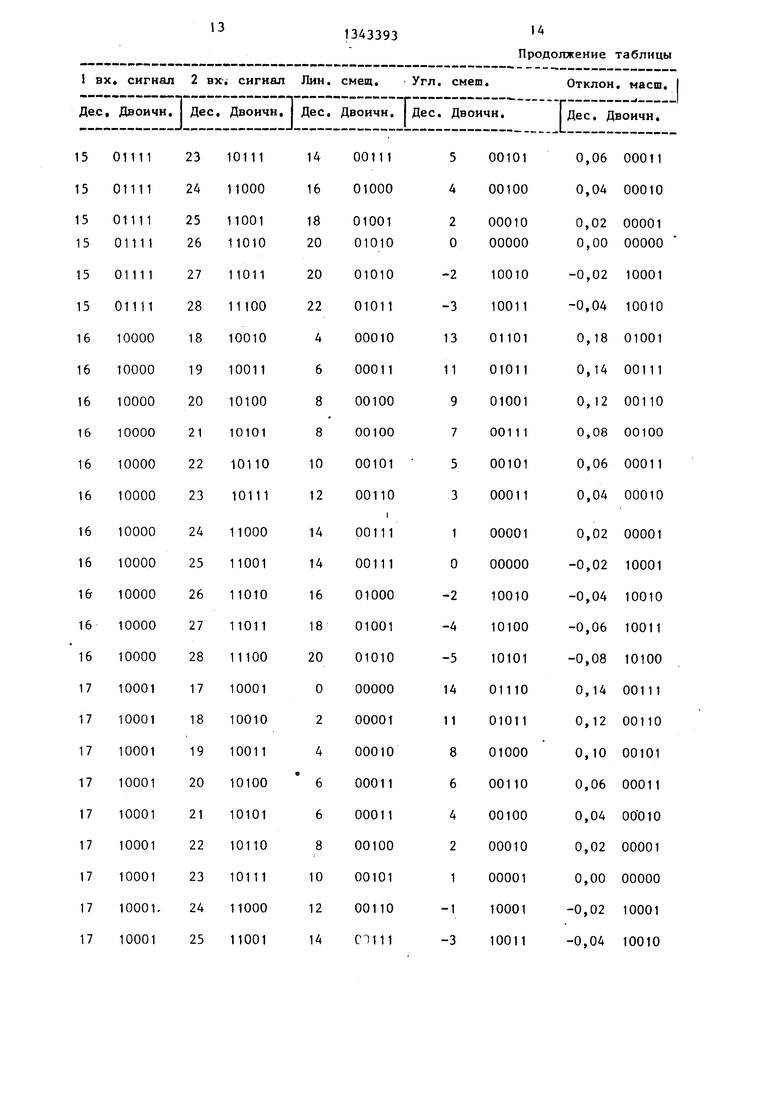
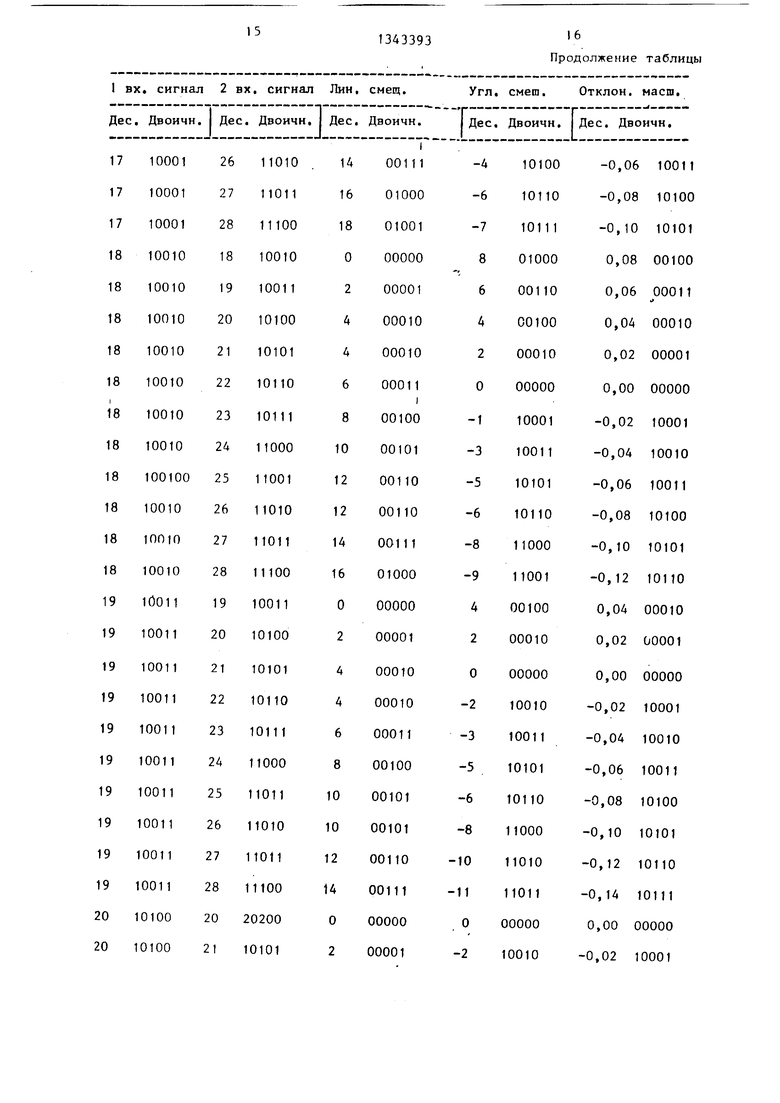
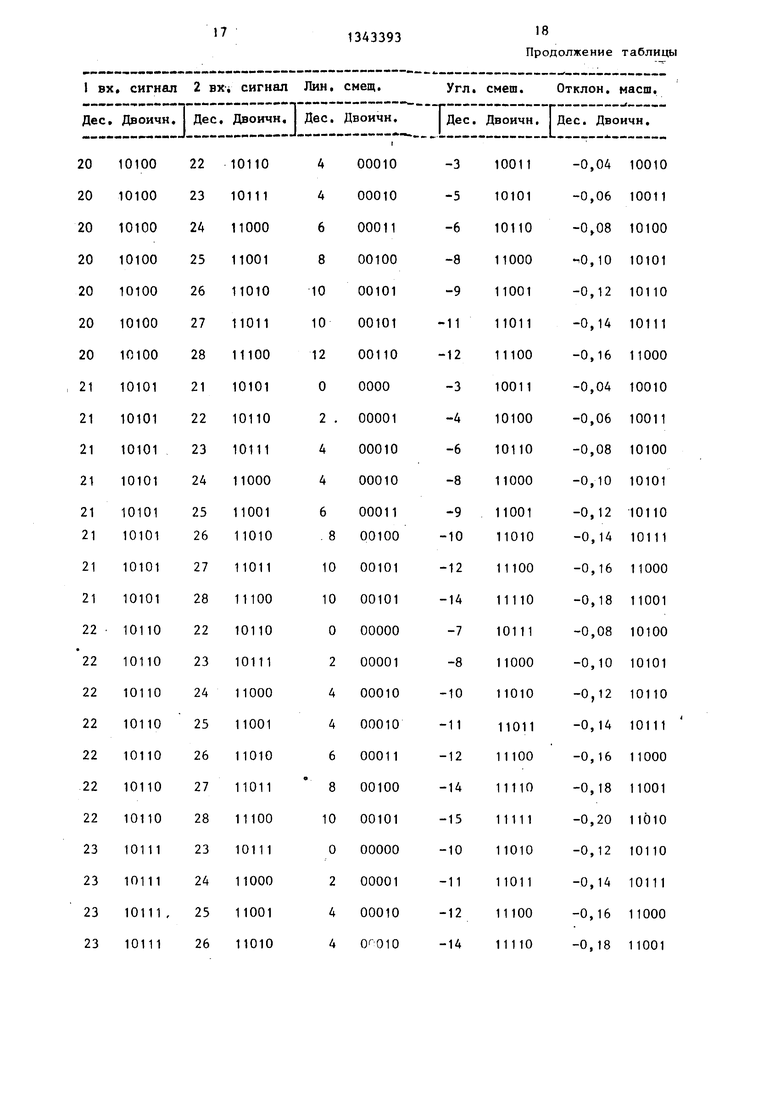
В таблиде приведены в десятичной и двоичной форме значения первого и второго входных сигналов и вычисленные с заданным числом двоичных разрядов с точностью величины линейного смещения (т.е. х и у), углового смещения oi и отклонения масштаба
D 2
Для хну входными
контролируется по индикаторам.
Поэтому формулы кодирования шифратора для примера имеют вид:
10
(19)
0,5 (
140680
V,
- 4225 (20)
(21)
(22)
ь
0
0
5
а
а для
:
0
5
сигналами являются V и
X, + х-7 - „ „ и-- - -- - V, и V, .
Четыре указанные функции можно закодировать на четырех микросхемах ППЗУ КР 556РТ6 с организацией по одной микросхеме на каждую функцию.Реализация шифратора 19 на четырех микросхемах ППЗУ КР 556РТ6 показана на фиг. 4. В микросхемах 26 и 27 защиты значения у и Ы. даны в зависимости от У,д и VP . Старший адресный разряд в них не используется, следующие пять разрядов, соответствующие вторым входам, отводятся под V, а на младшие пять разрядов, соответствующие первым входам, подается Vj. С младших пяти разрядов шины данных микросхем 26 и 27 снимаются коды у и ОС соответственно. Аналогично в микросхемах 24 и 25 защиты значения
X , + Х7 -
X и - -- даны в зависимости
от V, и V .
Кодировка микросхем ППЗУ по таблице осуществляется следующим образом. В микросхемы 26 и 24 по адресам 1 вх. сигнал, 2 вх. сигнал (конкатенация кодов) записываются значения линейного смещения, а по адресам 2 вх. сигнал с 1 вх. сигнал - значения линейного смещения с инверсным старшим разрядом. В микросхему 27 по адресам «с1 вх. сигнал, 2 вх. сигнал и -2 Бх. сигнал , 1 1 вх.
91343393. О
сигнал записываются значения угло- налов, отличающееся тем, вого смещения, а в микросхему 25 по что, с целью расширения функциональ- адресам вх. сигнал, ;2 вх. сиг- ных возможностей за счет определения нал и 2 вх. сигнал , 1 вх. сиг- поперечного и углового смещения транс- нал t записываются значения отклони- портного средства, петля содержит ния масштаба.один перпендикулярный направляющему
Закодированные таким образом мик- индукционному проводу неэкранирован- росхемы 24-27, соединенные как пока- ный участок и два экранированных уча- зано на фиг. 4, полностью реализуют ю стка, соединяющих неэкранированный функции шифратора 19.участок с направляющим индукционным
В качестве масштабирующих усилите- проводом, индукционные датчики распо- лей 11-14 можно использовать микро- ложены в вершинах квадрата, две сто- схемы операционных усилителей К140 роны которого параллельны продольной УДб 7 с переменным сопротивлением в 15 оси транспортного средства, оси двух цепи обратной связи. Методика пост- индукционных датчиков, определяющих роения и пример выполнения А1Щ приве- одну диагональ квадрата, параллель- дены в (8). В качестве индикаторов ны продольной оси транспортного сред- 20-23 можно использовать светодиоды ства, а оси двух других индукционных АЛ 310 с последовательно включенными 20 датчиков перпендикулярны этой оси. резисторами сопротивлением 1 кОм, по 2. Устройство по п. 1, о т л и- одному на каждый разряд выходных дан- чающееся тем, что блок форми- ных.рования управляющих сигналов содержит
четыре масштабирующих усилителя, чеФормула изобретения 25 тыре аналого-цифровых преобразователя, шифратор и четыре индикатора,
1. Устройство для определения по- причем входы масштабирующих усилите- ложения транспортного средства, со- лей подключены к соответствующим держащее направляющий индукционный входам блока, а выходы - к входам провод, проложенный под поверхностью зо соответствующих аналого-цифровых пре- движения транспортного средства и образователей, входы шифратора соеди- имеющий петли в местах останова транс- нены с выходами соответствующих ана- портного средства, на котором уста- лого-цифровых преобразователей, а новлены блок управления и четыре ин- выходы - с входами соответствующих дукционных датчика, выходы которых индикаторов, входы трех из которых подключены к соответствующим входам подключены к соответствующим выходам блока формирования управляющих сиг- блока.
13
1343393
14 Продолжение таблицы
15
1343393
16 Продолжение таблицы
19
1343393
20 Продолжение таблицы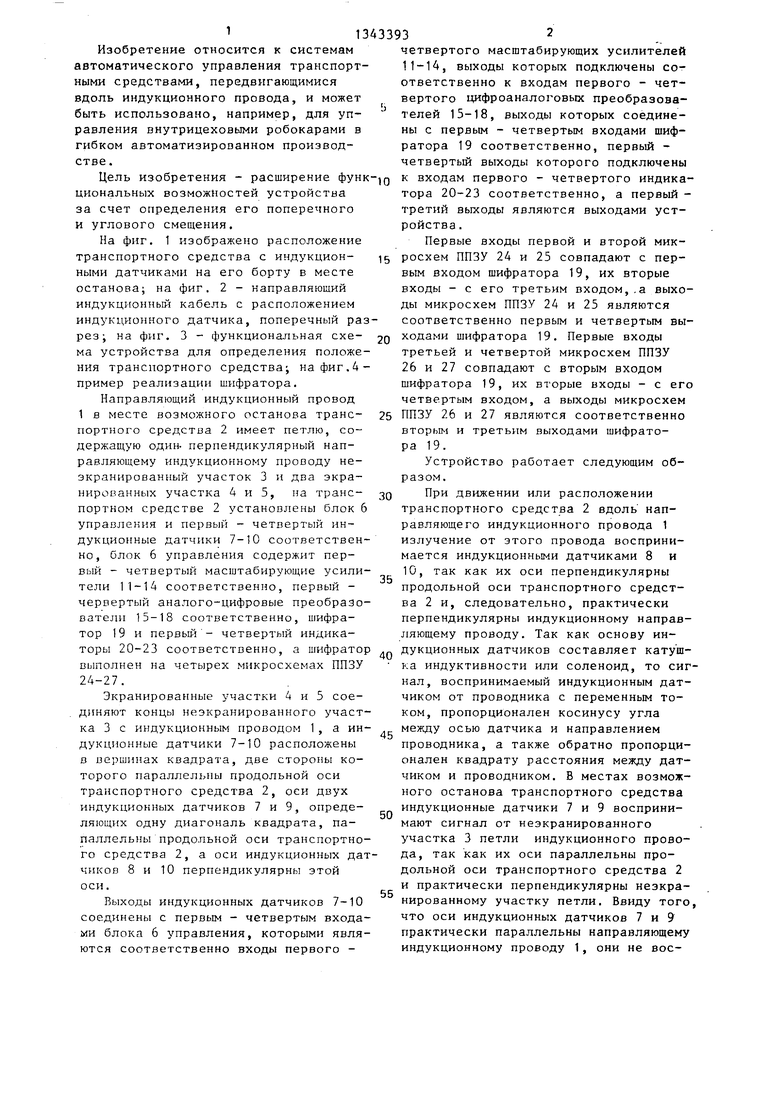

| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Гринберг И.П., Шуляковский Е.А | |||
| Измерители индукции переменных магнитных полей | |||
| Киев: Техника, 1982, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Яворский Б.М., Детлар А.А | |||
| Справочник по физике | |||
| М.: Наука, 1974, с | |||
| Реактивная катушка | 1924 |
|
SU944A1 |
| Шимянский Г.Л | |||
| Автоматические системы управления машинами напольного безрельсового электротранспорта за рубежом | |||
| Обзорная информация | |||
| МТС | |||
| Сер | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Организация складского хозяйства, механизация и автоматизация складских работ в материально-техническом снабжении | |||
| М.: ЦНИИТЭИМС, 1983 | |||
| с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Фолкенберри Л | |||
| Применение операционных усилителей и линейных НС | |||
| Пер | |||
| с англ | |||
| М | |||
| : Мир, 1985, с | |||
| Устройство для выпуска сточных вод в реки | 1923 |
|
SU572A1 |
| Фролов г.и., Гембецкий Р.А | |||
| Микропроцессоры | |||
| Автоматизированные системы контроля объектов | |||
| Учебное пособие для втулов | |||
| Под ред | |||
| Л.Н.Пресну- хина | |||
| М.: Высшая школа, 1984, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
