В переходных режимах, единый закон регулированияц;|..гсоп91 неприемлем,
Целью изобретения является повышение энергетических показателей электропривода
Это достигается тем, что в предложенный электропривод с машиной переменного тока, содержащий тиристорный преобразователь частоты, канал регулирования потокосцепления с первым блоком задания и регулятором потокосцепления и канал регулирования скорости с блоком задания, регулятором скорости и делительным устройством, введены второй блок задания потокосцепления, управляемый ключ с блоком управления, инвертирующий усилитель, сумматор и вычислительное устройство Входы последнего подключены к выходам второго блока задания потокосцеплени и упомянутого делительного устройства, а выход через одиниз входов сум;матора и управляемый ключ - ко входу узла сравнения регулятора потокосцепления „ Второй вход сумматора через инвертирующий усилитель подключен к выходу первого блока задания потокосцепления, а вход блока управления ключом - к блоку задания скорости.
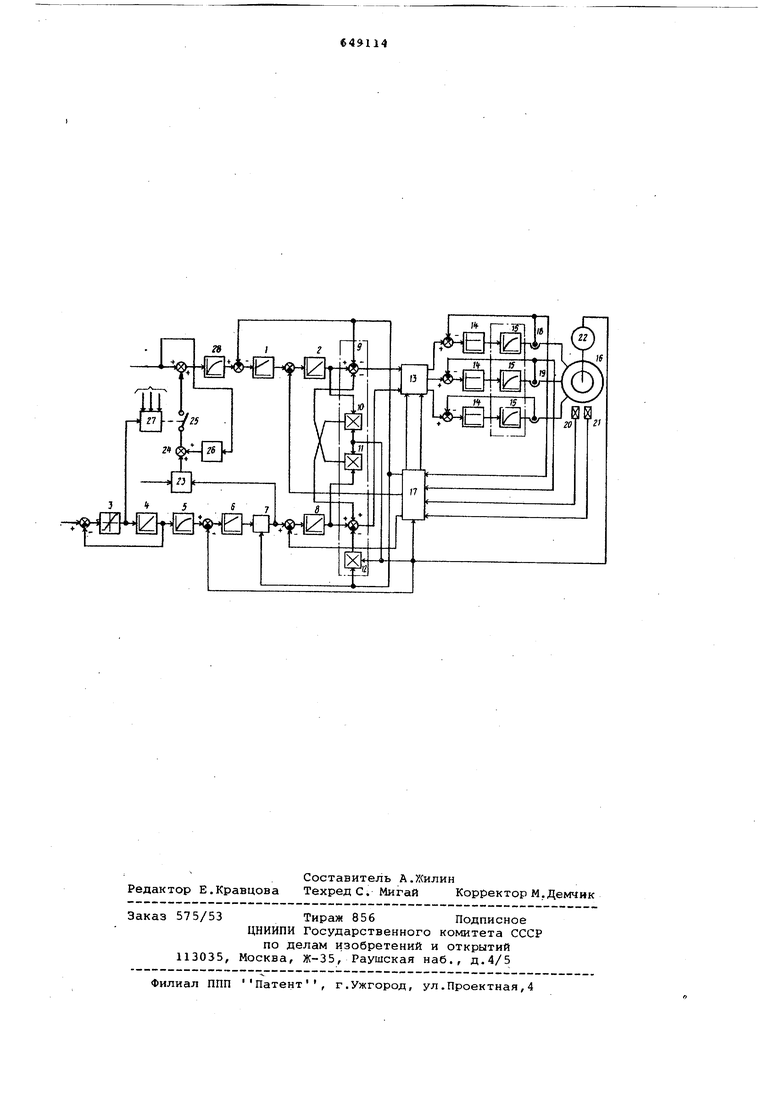
На чертеже показана функциональна схема предложенного электропривода. Один канал системы регулирования .электропривода состоит из интегрально-пропорционального регулятора 1 потокосцепления ротора, регулятора намагничивающего тока статора 2, а другой канал - из интегрозадающего устройства, включаюшего усилительограничитель 3 и интегратор 4, фильтра 5, ИП-регулятора скорости 6, делительного устройства 7 и И-регулятора активного тока ротора 8. Регуляторы в каждом канале соединены между собой по принципу подчиненного регулирования.
Кроме того, в устройстве имеется блок компенсирующих связей 9, включающий множительные устройства 10,11 12, и два сумматора, выходы которых подключены ко входам блока прямого преобразования координат 13. Последний вырабатывает сигналы задания фазных токов статора21 j2I;g,2;c , отрабатываемые в соответствующих контурах с П-регуляторами фазных токов 14, выходные сигналы которых подаются на входы фазных систем управления преобразователем частоты с непосредственной связью 15, питающего статор асинхронного двигателя 16.
В устройстве имеется также блок обратного преобразования координат 17, вырабатывающий сигналы действи-. тельного потокосцепления ротора VP намагничивающего Цд и активного igg токов статора, а также сигналы гаомонических функций iln V , cOi У угла у между обобщенным вектором ,, .потокосцепления ротора ф, и магнитной осью фазы Л статора. На вход этого блока подаются сигналы датчиков тока статора 18, 19,датчиков Холла 20, 21, установленных в воздушном зазоре двигателя, и тахогенератора 22.
Блок задания в канале регулирования потокосцепления формирует уставку минимального потокосцепления ротора (|) . В электропривод введен второй блок задания, формирующий уставку номинального главного потокосцепления ц) . Выход его через введенные вычислительное устройство 23, сумматор 24 и управляемый ключ 25 подключен ко входу узла
сравнения регулятора потокосцепления. Вычислительное устройство связано также с выходом делительного устройства 7 в канале регулирования скороети с сигналом (2 g. К сумматору 24
через инвертирующий усилитель 26
подключен выход первого блока задания потока сцепления с сигналом 1,,., . Ключ 25 управляется с помощью блока управления 27, подключенного к выходу усилителя - ограничителя 3 в
блоке задания канала регулирования скорости.
В установившемся режиме справедливо выражение
V6 VVp4K.-b,g.i2s (1)
гдеЦ)- потокосцепление воздушного зазора;
Кр- коэффициент связи ротора; OiipE индуктивность рассеяния ротора.
Б режиме холостого хода тогда, учитывая выражение (1),получим
i nxxVs.H. (2) где VBH номинальное потокосцепление воздушного .запора, выбираемое на колене кривой намагничивания.
Минимальное потокосцепление рстора устанавливается таким, чтобы при максимальном динамическом активном токе )25„д.достигалось номинальное потокосцепление воздушного зазора:
Vp«HH 1 4.r(,icf
обозначим
А V V г-4 г 2sf -
гмин
М)
Вычислительное устройство 23 реализует ня типовых аналоговых элементах зависимость, определяемую подкоренным выражением в (4). Когда ключ 25 замкнут нг. вход задания регулятора 1 через фильтр 28 полается сигнал
(K,-U,e4,)Sf5)
где звездочки обозначают уставки 65 соответствующих переменных, в отличие
от их значений в Физических единицах. Очевидно, что, .если регулятор 1 обеспечивает изменение в соответствии с выражением (5)
CQnst (6)
Режим V 6 con at в соответствии свыоажением (6) целесообразно обеспечить в установившемся режиме при разных нагрузках, т.е. в усуановившемся режиме ключ 25 должен быть замкнут. Если в установившемся режиме (так же, как и в динамике) поддерживается Фг.мин const , тогда Ц) g -значительно нижеС 15ц при нагрузках порядка номинальной, что снижает энергетические показатели (коэффициента мощности и КПД).
Ключ 25 управляется блоком 27, который в простейшем случае представляет логический элемент типа НЕ. В переходных режимах на входе интегратора 4 имеется отличный от нуля сигнал (единица), а на выходе 27 - нулевой сигнал, поэтому ключ 25 разомкнут. В установившемся режиме на входе интегратора 4 имеется нулевой сигнал, поэтому на яыходе 27 появляется отличный от.нуля сигнал (единица) и ключ 25 замкнут.
В электроприводе шахтного подъема управление ключом 25 может осуществляться также в функции времени или пути по сигналам соответствующих датчиков (см, стрелки на чертеже).
Работает электропривод в наиболее характерном режиме следующим образом Сначала подается задающий сигнал через фильтр 28 на вход регул 1тора 1, который вырабатывает уставку для регулятора 2. Последний формирует уставки регуляторов фазных токов. Переходный процесс уставки заданного значения Ц)р формируется совместным действием всех указанных регуляторов.
Затем на вход 6 через фильтр 5 подается сигнал задания скорости от интегро-задающего устройства. При этом ключ 25 разомкнут. Одновременно на выходе регулятора 6 появляется сигнал задания электромагнитного момента, который после прохождения через делительное устройство 7 образует сигнал задания активного тока статора i Контуры регулирования скорости, активного и намагничивающего токов статора вместеГс контурами регулирования фазных токов формируют типовую диаграмму электромагнитного момента.
соответствующую предписаниям симметричного оптимума. В результате происходит быстрый разгон асинхронного двигателя 1G до заданной скорости.
После достижения заданной скорости на входе интегратора И появляется нулевой сигнал, ключ 25 замыкается и в установирпемся режиме обеспечивается поддержание постоянства главного потокосцепления.
Таким образом, пЕ едложенный электропривод обеспечивает оптимальное использование двигателя в установившемся режиме, повышает энергетические показатели при сохранении высоких динамических свойств в переходных режимах.
Формула изобретения
1.Электропривод с машиной переменного тока, содержащий тиристорный преобразователь частоты, канал регулирования потокосцепления с первым блоком задания и регулятором потокосцепления и канал регулирования скорости с блоком задания, регулятором скорости и делительным устройством, отличающийся тем, что,
с целью повышения энергетических показателей, в него введены второй блок задания потокосцепления, управляемый ключ с блоком управления, инвертирующий усилитель, сумматор и вычислительное устройство, входыкоторого подключены к выходам второго блока задания потокосцепления и упомянутого делительного устройство, а выход через один из входов сумматора и управляемый ключ - ко входу узла сравнения регулятора потокосцепления, при этом второй вход сумматора через инвертирующий усилитель подключен к выходу - первого блока задания потокосцепления, а вход блока управления ключом - к блоку задания скорости.
2.Электропривод по п.1,о т л и чающийся тем, что входы блока управления ключом подключены дополнительно к выходам путевых или временных датчиков.
Источники информации, принятые во внимание при экспертизе
1.Siemens-S 1971, 45, 10,S. 761-764.
2. Патент ФРГ 1941312, кл. 21 С 59/36, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1975 |
|
SU611282A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |