1
Изобретение относится к частотнорегулируемым электроприводам и может быть использовано для прокатных станов, насосов, воздуходувок, шахтных подъемных машин, особенно при работе в неблагоприятных условиях среды,где требуется высококачественный, быстродействующий асинхронный электропривод с высокой перегрузной способностью и широким диапазоном регулирования скорости.
Известны электроприводы, содержащие асинхронный двигатель с фазным ротором, в котором соответствующие фазные обмотки с±атора и ротора соединены последовательно или параллельно и подключены к преобразователю частоты с непосредственной связью
1.
Однако такие электроприводы отличаются низким качеством регулирования скорости; кроме того, в них отсутствует устойчивость на некоторых частотах вращения.
Известен также электропривод,содержащий асинхронный двигатель с фазным ротором, в котором статор (ротор подключен к питающей сети непосредственно, а ротор (статор) - через преобразователь частоты 2.
Недостаток известного электропривода состоит в сравнительно низком диапазоне регулирования. К тому же необходимо специальное дорогостоящее пусковое устройство .цля первоначального достижения рабочих скоростей.
Наиболее близким к предлагаемому по технической сущности и достигаемо0му результату является электропривод, который содержит асинхронный двигатель с фазным ротором, а также содиненные по принципу подчиненного регулирования регуляторы потокосцепления
5 статора и намагничивающего тока ротора, регулятор скорости, регулятор активного тока ротора, блок компенсирующих связей, блоки прямого и обратного преобразований,датчики фазных токов,
0 напряжений, магнитного потока в воздушном зазоре , углового положения и скорости J.
Однако известный электропривод
5 также имеет низкое качество регулирования скорости.
Цель изобретения - улучшение регулировочных свойств электропривода,
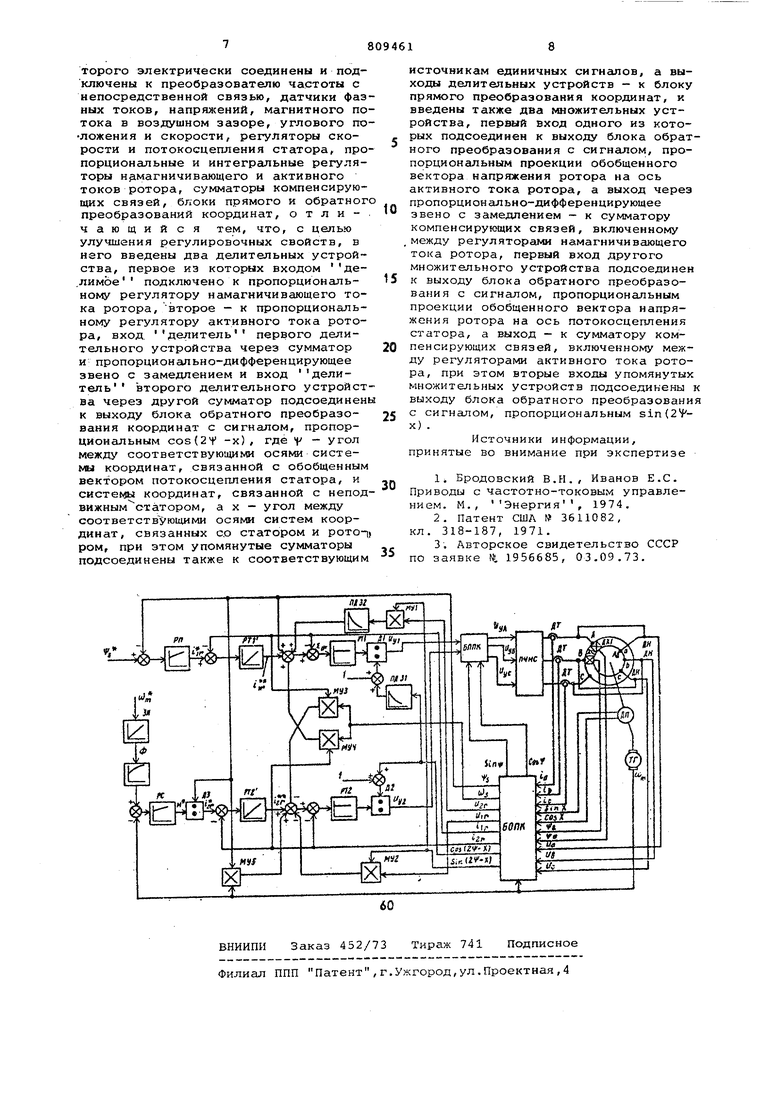
0 расширение диапазона регулируемых скоростей И повышение качества переходных процессов. Поставленная цель достигается те что Б асинхронный электропривод, содержащий асинхронный двигатель с фаз ним ротором, обмотки статора и ротора которого электрически соединены и подключены к преобразователю частоты с непосредственной связью, датчики фазных токов, напряжений, магнитного потока в воздушном зазоре, углового положения к скорости, регу ляторы скорости и потокосцепления статора, пропорциональные и интегральные регуляторы намагничивающего и активного токов ротора, сумматоры компенсирующих связей, блоки прямого и обратного преобразований координат введены два делительных устройства, первое из которых входом делимое подключено к пропорциональному регулятору намагничивающего тока ротора., второе - к пропорциональному регулятору активного тока ротора, вход устройства через сумматор и пропорционапьно-дифференцирующее звено с роге делительного устройства через другой сумматор подсоединены к выходу блока обратного преобразования координат с сигнгшоМ; пропорциональным со5(2У - х), где у - угол между соответствующими осями системы координат, связанной с обобщенным вектором потокосцепления статора, и системы координат, связанной с неподвижным статором, а X угол между соответствующими.осями координат, связанных со статором и ротором, при этом упомянутые сумматоры подсое динены также к соответствующим источникам единичных сигналов, а выходь; делительных устройств - к блоку прямого преобразования координат. Вводятся также два множительных устройства, первый вход из которых подсоединен к выходу блока обратного преобразования с сигналом, пропорцио нальным проекции обобщенного вектора напряжения ротора на ось активного тока ротора, а выход через пропорцио нально-дифференцирующее звено с замедлением - к сумматору компенсирующих связей, включенному между регуля торами намагничивающего тока ротора, первый вход другого множительного устройства подсоединен к выходу блока обратного преобразования с сигналом, пропорциональным проекции обобщенн.огоi ектора напряжения ротора на ось потокосцепления статора, а выход к сумматору компенсирующих связей, включенному между регуляторами актив го тока ротора. При этом вторые входы упомянутых множительных устройств подсоединены к выходу блока обратно|ГО преобразования с сигналом, пропор циональным sin(2 У- х) . На чертеже представлена функциональная схема предлагаемого асинхронного электропривода. Регулирование тока- ротора асинхронного двигателя (АД) производится в осях ортогональной cHCTeNW координат, одна из которых направлена по Обобщенному вектору потокосцепления статора, а другая - в опережгиощем на 90 электрических градусов напряжении. Фазные обмотки А, в, С статора и Of с / с ротора электрически соединены между собой и подключены к преобразователю частоты с непосредственной связью (ПЧНС). В Фазные цепи включены датчики токов (ДТ) и напряжений (ДН). В воздушном зазоре АД установлены датчики Холла (ДХ1) и ДХ2), а на валу - датчик углового положения (ДП) и тахогенератор (ТГ). Выходы датчиков подсоединены к блоку обратного преобразования координат (БОПК). Ко входу ПЧНС подсоединен блок прямого преобразования координат (БППК). Из уравнений, и структурной схемы АД с электрическим соединением обмоток статора и ротора следует, что в АД возникают не только внутренние перекрестные связи, свойственные обычному АД, но и нелинейные перекрестные связи между внешними воздействиями (напряжениями). Кроме того, возникооот дополнитепьные нелинейности в прямых каналах. Последние обстоятельства служат серьезным препятствием для синтеза высококачественного электропривода, так как затрудняют формирования рациональных законов изменения основных величин, от которых зависит электромагнитный момент АД, а именно потокосцепления статора и активного тока ротора Линеаризация каналов управления в предлагаемом электроприводе осуществляется с помощью введенных в прямые кансшы делительных устройств Д1 и Д2, подключенных своими входаt w. делимое к выходам пропорциональных регуляторов токов РТ1 и РТ2, а своими выходами - к входам БППК. Входы делитель Д1 и Д2 формируются в виде сумм единичного сигнала и сигнала соз(2Ч - х) , где У - угол между осью обобщенного вектора потокосцеплении статора и осью оС статора (Магнитная ось фазы А), ах- угол между осью Dd статора и осью оС ротора (магнитная ось фазы о.) . При этом сигнал cos(2V- х) поступает на Д1 чеез пропорционально-дмфференцируйцее звено с замедлением ПД31. Развязка по управляющим воздействиям осуществляется с помощью множительных vcTpofiCTB МУ1 и МУ2, причем выход -МУ через пропорционально-дифференцирующее звено с замедлением ПД32 соединен со входом сумматора з блоке компенсирующих связей, включенного между интегральным регулятором намагничивающего тока РТ1 и регулятор РТ1, а выход МУ2 непосредственно соединен со входом сумматора в блоке компенсирующих связей, включенного между интегральным регулятором активного тока РТ2 и регулятором РТ2 . Включение формирующих звеньев поз воляет производить формирование коор динаты Yj в функции одной величины i(- , компенсируя вторую (нелинейную) составляющую этой координаты, в результате чего упрощается синтез регуляторов . После произведенной линеаризации и развязки по внешним воздействиям развязка каналов управления по остал ным (внутренним ) связям АД не вызывает затруднений. Вход регулятора РТ2 через делител ное устройство ДЗ связан с выходом регулятора скорости (PC) и с выходом БОПК с сигналом активного тока iar. Делительное устройство ДЗ линеаризуе подсистему регулирования момента при изменении потокосцепления статора АД На вход PC через фильтр (Ф) и задатчик интенсивности (ЗИ) подается сигнал заданной скорости ш. Кроме того, на вход PC поступает сигнал обратной связи по частоте вращения вала. Вход РТ1 связан с выходом регулятора потокосцепления (РП) и с выходом БОПК с сигналом тока намагни вания . На вход РП подается сигнал,пропор циональный заданному потокосцеплению У , а также выходной сигнал Vj БОПК. Множительные устройства МУЗ, №4 и МУ5 формируют сигналы, компенсирую щие внутренние обратные связи АД. Положительная связь по сигналу УЗ / вводимая в верхний узел компенсирующих связей, также компенсирует собственную внутреннюю связь АД в канале регулирования потокосцепления. Делительное устройство ДЗ линеаризует подсистему регулирования электромагнитного момента двигателя. Формирование рациональных законов изменения основных координатора iir производится с помощью РТ1, РТ2, РП и PC, включенных по принципу подчиненного регулирования параметров с последовательной коррекцией. Введение внутренних контуров регулирования фазных токов с пропорцио нальными регуляторами фазных токов РТ1 и РТ2 упрощает компенсацию внутренних связей АД и линеаризацию нели нейностей ПЧНС. В блоке обратного преобразования БОПК производится формирование гармонических функций sin У и cosH/onpe деление амплитуды потокосцепления статора и составляющих напряжений и токов ротора ir iir по осям-регулирования, определение частоты скольжения , формирование гармонических функций sin(24-x) и, cos(2V - х) . В блоке прямого преобразования БППК производится формирование соответствукицих напряжений управления для ПЧНС по сигналам каналов регулирования намагничивгиощего и активного токов ротора. Предлагаемой электропривод в типовом режиме работает следующим образом. При пуске на вход ЭЙ подается ступенчато постоянный сигнал OJjJi задания скорости,на входе ЗИ получаем линейно изменяющийся с требуемым темпом сигнал. Фильтр (ф) демпфирует этот сигнал, чем уменьшается перерегулирование динамического момента примерно до 8%. Далее сигнал с выхода Ф поступает на вход PC, где он алгебраически суммируется с сигналом обратной связи датчика ТГ частоты вращения. PC формирует на выходе сигнал, пропорциональный заданному моменту двигателя М , который после прохождения через ДЗ образует сигнгш установки активного тока двигателя Одновременно на вход регулятора потокосцепления (РП) подаются сигна- лы задания и обратной связи по hoтокосцеплению статора, а на его выходе получается сигнал задания намагничивающего тока двигателя i . Контуры регулирования токов формируют требуемые диаграммы пусковых токов (активного и намагничивающего), обеспечивая поддержание с малым перерегулированием постоянного динамического момента. В предлагаемом асинхронном электроприводе обеспечивается устойчивость во всех режимах работы и высокая перегрузочная способность ограничиваемая, лищь мощностью источников питания и механической прочностью двигатеЛя. В электроприводе показатели качества переходных процессов соответствуют стандартным характеристикам высокодинакмчныхлинейных прнводов с подчиненным регулированием параметров. Диапазон регулирования скорости обеспечивается не менее 10:1 при минимальной рабочей скорости 0,1, что одновременно исключает необходимость применить специальное пусковое устройство и упрощает пуск и реверс электропривода. Кроме того, электропривод прост в настройке и обеспечивает ограничения, регулируемых величин. Формула изобретения Асинхронный электропривод, содержащий асинхронный двигатель с фазным ротором, обмотки статора и ротора ко
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Устройство для управления асинхронным двигателем | 1976 |
|
SU657559A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1975 |
|
SU611282A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU649114A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
