1
Изобретение относится к электротехнике и может быть использовано п системах частотного управления асинхронным высокочастотным двигателем, имеющих транзисторный преобразовател частоты с явно выраженным звеном постоянного тока, в частности в препаративных ультрацентрифугах.
Цель изобретения - повышение точности стабилизации частоты вращения и надежности путем снижения ударных моментов в электродвигателе при переходе из одного режима в другой.
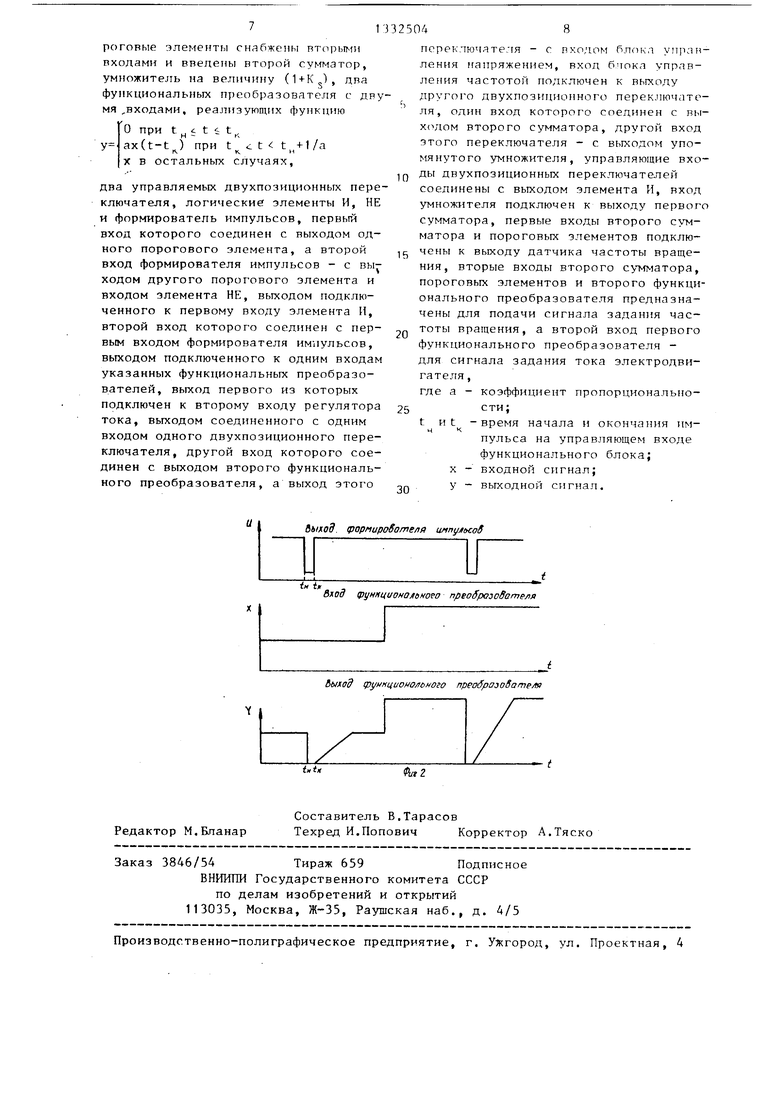
На фиг.1 приведена блок-схема час тотко-управляемого электропривода; на фиг. 2 - диаграммы состо яний на выходе формирователя импульсов, а такж на входе X и на выходе Y функционального преобразователя.
Частотно-управляемый электропривод содержит асинхронный электродвигатель 1, связанный с выходом преобразователя 2 частоты. Один управляющий вход преобразователя 2 частоты соединен с выходом блока 3 управления напряжением, а другой управляющи вход - с выходом блока 4 управления частотой. На выходе преобразователя 2 частоты включен датчик 5 тока, выходом подключенный к одному входу регулятора 6 тока. На валу асинхронног электродвигателя 1 установлен датчик 7 частоты вращения, выход которого через цепь 8 обратной связи подключе к входу регулятора 9 частоты и к первым входам сумматоров 10 и 11. Выход сумматора 10 соединен с входом умножителя 12 на величину (НК). Выходы умножителя 12 и сумматора 11 соединены с информационными входами двухпо- зиционного переключателя 13, выход которого соединен с блоком А управления частотой. Выход датчика 7 частот вращения соединен с входами пороговых блоков 14 и 15, выходы которых подключены к входам форг рователя 16 импульсов, выход которого подключен к первым входам функциональных преобразователей 17 и 18. Второй вход X первого функционального преобразователя 17 служит для сигнала задания частоты вращения, а второй вход X второго функционального преобразователя 18 предназначен для сигнала задания тока электродвигателя. Выход Y функционального преобразователя 18 подключен к второму входу регулятора 6 тока, выход которого соединен с
первым информационным входом двухпо- зиционного переключателя 19, второй информационньш вход которого подключен к выходу Y функционального преобразователя 17. Выход переключателя 19 соединен с входом блока 3 управления напряжением. Управляющие входы переключателей 13 и 19 соединены с выходом элемента И 20, первьй вход которого соединен с выходом 3JTeMeHTa НЕ 21, а второй вход элемента И 20 - с первым входом формирователя 16 импульсов.
Электропривод работает следующим образом.
Формирователь 16 импульсов вырабатывает на выходе импульс в случае любого изменения состояния на выходе пороговых блоков 14 и 15. Импульс с выхода формирователя 16 поступает на управляющие входы функциональных преобразователей 17 и 18. Каждый функци- ональньш преобразователь реализует Функцию типа
О при t i t t
У
0
ax(t-t)
Ч
при
X в остальных случаях где а
VS.
(1)
t ,t
v4 ;
5
0
5
0
5
коэффициент пропорциональности;
время начала и окончания импульса на управляющем входе функционального блока; X - входной сигнал; у - выходной сигнал. При Включении питания задатчик частоты (не показан) подает сигнал (j) , представляющий заданное значение частоты вращения, на пороговые блоки 14 и 15, а также на вход функционального преобразователя 17.
На вход X функционального преобразователя 18 поступает сигнал Ij (не показан), соответствующий заданному значению тока электродвигателя, а на сумматор 10 - сигнал, соответствующий заданной величине скольжения.
На вход блока 4 поступает сигнал, который преобразуется в частоту следования импульсов, подаваемых на преобразователь 2. На выходе последнего получается переменное трехфазное напряжение, частота которого пропорциональна частоте указанных импульсов. Это напряжение подается в цепь питания электродвигателя 1. Величина этого напряжения регулируется блоком 3.
313
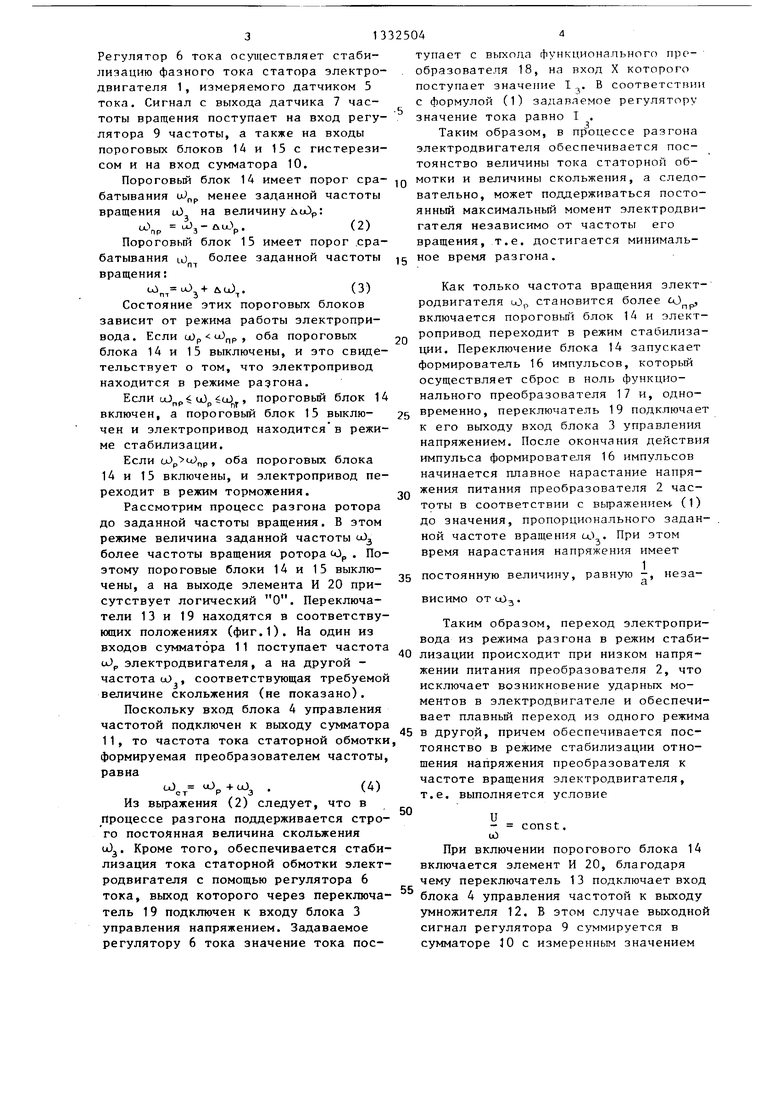
Регулятор 6 тока осуществляет стабилизацию фазного тока статора электродвигателя 1, измеряемого датчиком 5 тока. Сигнал с выхода датчика 7 частоты вращения поступает на вход регулятора 9 частоты, а также на входы пороговых блоков 1Д и 15 с гистерезисом и на вход сумматора 10.
Пороговый блок 14 имеет порог сра
батывания oJ менее заданной частоты
вращения
оО„„
о) на величину доОр:
LAJj- ли..
(2)
Пороговый блок 15 имеет порог .срабатывания LL) более заданной частоты вращения:
,,+ ди).(3)
Состояние этих пороговых блоков зависит от режима работы электропривода. Если а)р IJL) , оба пороговых блока 14 и 15 выключены, и это свидетельствует о том, что электропривод находится в режиме разгона.
Если и)р $0) , пороговый блок 14 включен, а пороговый блок 15 выключен и электропривод находится в режиме стабилизации.
Если u-), оба пороговых блока 14 и 15 включены, и электропривод переходит в режим торможения.
Рассмотрим процесс разгона ротора до заданной частоты вращения. В этом режиме величина заданной частоты сО более частоты вращения ротора Ор . Поэтому пороговые блоки 14 и 15 выключены, а на выходе элемента И 20 присутствует логический О. Переключатели 13 и 19 находятся в соответствующих положениях (фиг.1). На один из входов сумматора 11 поступает частота х)р электродвигателя, а на другой - частота оО , соответствующая требуемой
Таким образом, переход электропри вода из режима разгона в режим стаби 40 лизации происходит при низком напряжении питания преобразователя 2, что исключает возникновение ударных моментов в электродвигателе и обеспечи вает плавный переход из одного режим
тоянство в режиме стабилизации отношения напряжения преобразователя к частоте вращения электродвигателя, т.е. выполняется условие
величине скольжения (не показано). Поскольку вход блока 4 управления
частотой подключен к выходу сумматора , „
..„ - 45 в другой, причем обеспечивается пос11, то частота тока статорной обмотки, ,,, „ гч -,(;
формируемая преобразователем частоты, равна
Чг ()
Из выражения (2) следует, что в процессе разгона поддерживается строго постоянная величина скольжения и). Кроме того, обеспечивается стабилизация тока статорной обмотки электродвигателя с помощью регулятора 6 тока, выход которого через переключатель 19 подключен к входу блока 3 управления напряжением. Задаваемое
50
и
сО
const.
55
При включении порогового блока 14 включается элемент И 20, благодаря чему переключатель 13 подключает вход блока 4 управления частотой к выходу умножителя 12. В этом случае выходной сигнал регулятора 9 суммируется в сумматоре JO с измеренным значением
регулятору 6 тока значение тока пос
тупает с выхода функционального преобразователя 18, на вход X которого поступает значение I.,. В соответстг ии с формулой (1) задаваемое регулятору значение тока равно I ,
Таким образом, в процессе разгона электродвигателя обеспечивается постоянство величины тока статорной обмотки и величины скольжения, а следо
15
20
25
30
35
вательно, может поддерживаться постоянный максимальный момент электродвигателя независимо от частоты его вращения, т.е. достигается минимальное время разгона.
Как только частота вращения электродвигателя tOp становится более Х)р, включается noporoBbtfi блок 14 и электропривод переходит в режим стабилизации. Переключение блока 14 запускает формирователь 16 импульсов, который осуществляет сброс в ноль функционального преобразователя 17 и, одновременно, переключатель 19 подключает к его выходу вход блока 3 управления напряжением. После окончания действия импульса формирователя 16 импульсов начинается плавное нарастание напряжения питания преобразователя 2 частоты в соответствии с вьфажениен (1) до значения, пропорционального заданной частоте вращения и.) . При этом время нарастания напряжения имеет
1 постоянную величину.
равную -, а
независимо от и)
3
Таким образом, переход электропривода из режима разгона в режим стаби- 40 лизации происходит при низком напряжении питания преобразователя 2, что исключает возникновение ударных моментов в электродвигателе и обеспечивает плавный переход из одного режима
, „
тоянство в режиме стабилизации отношения напряжения преобразователя к частоте вращения электродвигателя, т.е. выполняется условие
,,, „ гч -,(;
50
и
сО
const.
55
При включении порогового блока 14 включается элемент И 20, благодаря чему переключатель 13 подключает вход блока 4 управления частотой к выходу умножителя 12. В этом случае выходной сигнал регулятора 9 суммируется в сумматоре JO с измеренным значением
частоты вращения ротора и умножается на величину (1-fK ).
Таким образом, частота статора электродвигателя 1 определяется выражением
сО,, ()Кр-ю)р1(НКд), (5)
где К - коэффициент передачи регуля- р
тора частоты вращения;
К - относительное скольжение
электродвигателя. Частота электродвигателя связана с частотой магнитного поля статора соотношением
.
ст
(6)
Учитьшая вьфажение (6), получают из выражения (5), что частота ротора равна заданной частоте, T.e.a3p cJ, т.е. погрешность стабилизации, обусловленная скольжением электродвигателя, практически близка к нулю.
Если заданная частота вращения LOg менее и)р на величину ли), то оба поро говых блока 1Д и 15 включаются и электропривод переходит в режим торможения. В этом случае на вход сумматора 11 поступает сигнал «J ° казан), а переключатели 13 и 19 устанавливаются в соответствующее положе- 30 электропривода из одного заданного ние. Вход блока 4 управления частотой режима в другой обеспечивает высокую
в этом случае соединяется с выходом сумматора 11, а выход регулятора 6 тока соединяется с входом блока 3 управления напряжения. Одновременно при переключении порогового блока 15 в момент перехода в режим торможения запускается формирователь 16 импульсов, которьй обуславливает нулевое состояние на выходе функционального 1треобразователя 18. Поэтому регулятору 6 тока задается нулевое значение тока.
После окончания импульса, вырабатываемого формирователем 16, начинается линейное нарастание тока, задаваемого функциональным преобразователем 18 до значения 1 в соответствии с выражением (1). В результате этого
надежность.
Формула изобретения
35
Частотно-управляемый электропривод, содержащий асинхронный электродвигатель, связанный с выходом преобразователя частоты, один управляющий
40 вход которого соединен с выходом блока управления напряжением, а другой управляющий вход преобразователя частоты - с выходом блока управления частотой, датчик тока асинхронного
45 электродвигателя, регулятор частоты вращения, сумматор и датчик частоты вращения, выход которого подключен к входу регулятора частоты и к первому
входу сумматора, вторым входом свя- переход в режим торможения происходит 50 занного с выходом регулятора частоты при низком значении фазного тока ста- вращения, регулятора тока с двумя
входами, один из которых подключен к выходу датчика тока, и два пороговых элемента, отличающийся 55 тем, что, с целью повьшдения точности стабилизации частоты вращения и повышения надежности путем снижения ударных моментов при переходе из одного режима в другой регулятор тока и поторной обмотки, а следовательно, исключаются ударные нагрузки. Плавное нарастание этих токов обуславливает плавный переходный процесс. При этом длитель ность переходного процесса не зависит от величины задаваемого тока. Поскольку вход блока А управления частотой подключен к выходу сумматора
0
11, на вход которого поступает частота иО и значение отрицательного смещения - -,: (не показано) то частота тока в обмотках статора равна
,, .,-сОз.
в результате в процессе торможения обеспечивается постоянная величина скольжения.
I
Таким образом, в предлагаемом электроприводе достигается повьштение точности стабилизации частоты вращения, поскольку исключается составляющая погрешность стабилизации, обус5 ловленная скольжением электродвигателя. Повьппение точности стабилизации достигается также за счет вьтолнения блоков управления полностью на цифровых элементах. Это исключает временной и температурный дрейфы параметров регулятора с частоты и позволяет с большой точностью поддерживать заданной значение скорости электродвигателя. Тем самым сводится к минимальной
5 величине время разгона и торможения. Кроме того, резко упрощается процесс настройки электропривода, поскольку в данном случае на требуется подстро- ечных элементов. Плавный переход
надежность.
Формула изобретения
35
Частотно-управляемый электропривод, содержащий асинхронный электродвигатель, связанный с выходом преобразователя частоты, один управляющий
40 вход которого соединен с выходом блока управления напряжением, а другой управляющий вход преобразователя частоты - с выходом блока управления частотой, датчик тока асинхронного
45 электродвигателя, регулятор частоты вращения, сумматор и датчик частоты вращения, выход которого подключен к входу регулятора частоты и к первому
роговые элег-1енты снабжены вторыми входами и введены второй сумматор, умножитель на величину (1+К), два функциональных преобразователя с двумя ,входами, реализующих функцию
О при t t t,
ax(t-t ) при t с t t,+1/а
rSГУ
X в остальных случаях.
два управляемых двухпозиционньгх переключателя, логические элементы И, НЕ и формирователь импульсов, первый вход которого соединен с выходом одного порогового элемента, а второй вход формирователя импульсов - с выходом другого порогового элемента и входом элемента НЕ, выходом подключенного к первому входу элемента И, второй вход которого соединен с первым входом формирователя импульсов, выходом подключенного к одним входам указанных функциональных преобразователей, выход первого из которых подключен к второму входу регулятора тока, выходом соединенного с одним входом одного двухпозиционного переключателя, другой вход которого соединен с выходом второго функционального преобразователя, а выход этого
325048
псреключяте:1я - с пходом блока ynjian- ления напряжением, вход блокл управления частотой подключен к выходу другого двухпозиционного переключателя, один вход которого соединен с BI.I- ходом второго сумматора, другой вход этого переключателя - с выходом упомянутого умножителя, управляющие ды двухпозиционньгх переключателей соединены с выходом элемента И, вход умножителя подключен к выходу первого сумматора, первые входы второго сумматора и пороговых элементов подклю1с чсны к выходу датчика частоты вращения, вторые входы второго су тматора, пороговых элементов и второго функционального преобразователя предназначены для подачи сигнала задания частоты вращения, а второй вход первого функционального преобразователя - для сигнала задания тока электродвигателя , где а - коэффициент пропорционально25 сти;
t иt -время начала и окончания имц к
пульса на управляющем входе функционального блока; X - входной сигнал; 2Q , у - выходной сигнал.
20
былоЗ. tpopnupoSome/te unnyjttcoS
ix д
вд( унпционолйно о преобразоВоте/1Я
йылад грунмционолбною npeoSpoioSome/Ki
Редактор М.Бланар
Составитель В.Тарасов
Техред И.Попович Корректор А.Тяско
Заказ 3846/54 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
- t
Й/г2

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Устройство для автоматического управления электроприводом автономного транспортного средства | 1985 |
|
SU1289711A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU780139A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Электропривод переменного тока | 1988 |
|
SU1534737A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение точности стабилизации частоты вращения и надежности. Указанная цель достигается введением в частотно-управляемый электропривод сумматора 13, умножителя 12 на величину (HKj), функциональных преобразователей 17, 18, формирователя 16 импульсов, логического элемента И 20 и логического элемента НЕ 21. В электроприводе исключается погрешность стабилизации, обусловленная скольжением, временным и температурными дрейфами параметров регулятора. 2 ил.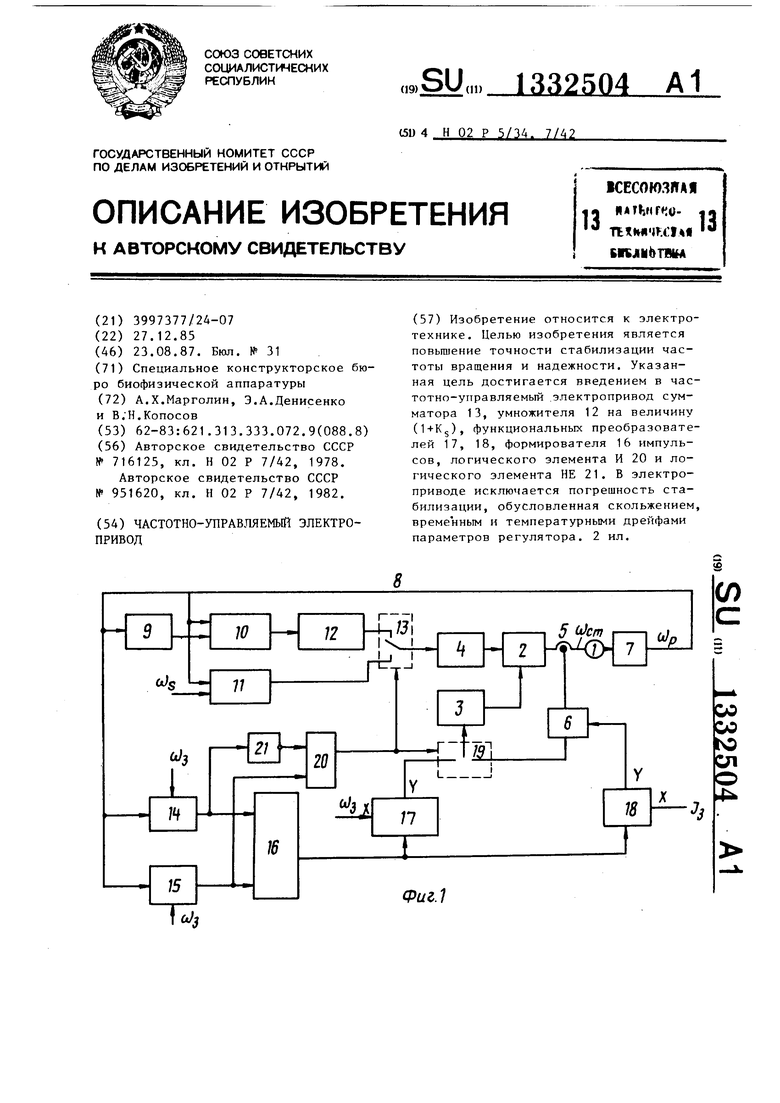
| Частотно-упавляемый асинхронный электропривод | 1978 |
|
SU716125A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-управляемый асинхронный электропривод | 1980 |
|
SU951620A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
