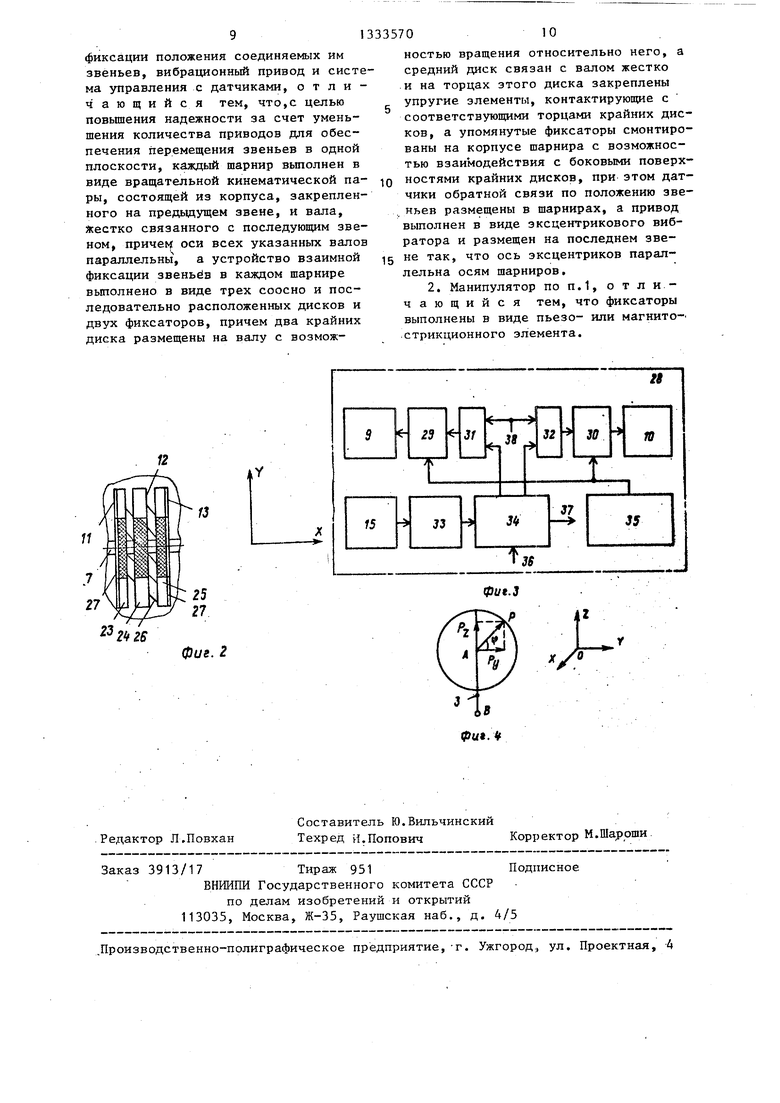
Устройство взаимной фиксации звеньев, например фрикционная передача, содержит (фиг.2) фрикционные элементы 11-13, представляющие собой диски 23-25 из ударопрочного фрикционного материала, например фенопласта. На диске 2l фрикционного элемента 12 закреплены упругие элементы 26, например, из стальной проволоки. При этом упругие элементы 26 установлены под определенным углом к поверхностям диска 24 и дисков 23 и 25 соответственно таким образом, что вращение диска 24 относительно диска ;25 (смотря с конца вектора ОХ прямоугольной системы координат dXYZ) может осуществляться лишь по часовой стрелке, а вращение диска 24 относительно диска 23 - лишь против часовой стрелки. Противоположные вращения диска 24 относительно дисков
23и 25 исключаются из-за наличия микронеровностей, соизмеримых с диаметром упругих элементов 26 на фрикционных поверхностях дисков 23
и 25, и упругие элементы 26 изгибаются, например, при вращении диска
24относительно диска 25 против часовой стрелки, упираясь в микроне- ровности диска 25, и препятствуют вращению диска 24. При вращении, например, диска 24 относительно диска 2 по часовой стрелке происходит беспрепятственное скольжение упругих эл ментов 26 по поверхностям дисков 23
и 25, не находящихся во фрикционной связи с упругими элементами 26. В устройстве закреплена медная фольга 27, которая устанавянвается лишь в случае применения в качестве фиксатора электрореологической жидкости, находящейся в полости корпуса шарнира, так: как при этом изменение вязкости жидкости происходит путем пода чи разности потенциалов между фольгой 27 и корпусом 6 шарнира, а фрикционные элементы 11-13 электрически изолированы между собой и корпусом 6 шарнира 5 и осью 7.
Схемы блоков 28 управления фиксаторами у каждого шарнира одинаковы и содержат, например у шарнира 5 (фиг.З), фиксаторы 9 и 10, датчик 15 положения звеньев, управляемые ключи 29 и 30, элементы И 31 и 32, аналого-цифровой преобразователь (АЦП) ;33, схему 34 сравнения, источник 35
5 0
5
О с
0 5
0
5
напряжения, адресньш вход,36 и выход 37 Равны схемы 34 сравнения и вход 38 Пуск. При этом датчик 15 и АЦП 33 соединены последовательно , между собой, а выход АЦП 33 подключен к информационному входу схемы 34 сравнения, адресный вход 36 которой подключен к соответствующему входу устройства управления манипулятором (не показано) , выход 37 Равны схе- мы 34 сравнения подключен к соответствующему входу устройства управления манипулятором (не показано), первые входы элементов И 31. и 32 подключены соответственно к выходам Меньше и Больше схемы 34 сравнения, вторые входы элементов И 31 и 32 объединены между собой и подключены к входу 38 Пуск, который соединен с соответст- выходом устройства управления манипулятором (не показано), выходы элементов И 31 и 32 соединены с управляющими входами ключей 29 и 30 соответственно, информационные входы которьпс объединены между собой и под-, ключены к выходу источника 35 напряжения, а выходы ключей 29 и 30 подключены к входам управления фиксаторов 9 и 10 соответственно. Корпус 6 шарнира 5 соединен с общим выходом блока 28 управления фиксаторами. Если в качестве фиксаторов используются пьезоэлементы или магнитострик- ционные элементы, то применяется источник 35 высокочастотного напряжения, и выход соответствующего зш- равляемого ключа 29(30) подключается к одному из элементов пьезоэлемента или выводу обмотки управления магни- тострикционного элемента, а другой электрод или вьтод обмотки подключается к общему выходу блока 28 управ-. ления фиксаторами. Причем частота колебаний напряжения со источника 35 выбирается больше частоты вибратора 1 6 .
Если в качестве фиксаторов используется электрореологическая жидкость, то применяется источник 35 постоянного напряжения, а выход соответствующего управляемого ключа 29(30) соединяется с фольгой 27 соответствующего фрикционного элемента 11(13), а в схеме блока управления фиксатора™ ми 28 вместо элементов И 31 и 32 используются элементы И-НЕ.
Манипулятор работает следующим образом.
В положении статического равновесия манипулятора привод 16 откпючб;н, а,на вход 38 Пуск блока 28 управления фиксаторами с соответствующего выхода устройства управления манипулятором (не показано) подается нулевой сигнал (низкий уровень напряжения) . Если фиксаторами являются пье- зо- или магнитострикционные элементы то на выходах элементов. И 31 и 32 устанавливаются нулевые сигналы,. которые .закрьтают управляемые ключи 29 и 30, и источник 35 высокочастот- ного напряжения отключается от фиксаторов 9 и 10, .которые плотно прилегают к поверхности дисков 23 и 25 фрикционных элементов 11 и 13, препятствуя их вращению. Аналогичноj если фиксатором является электрореологи- ческая жиДкость, то на выходах схемы И-НЕ 31 и 32 устанавливаются единичные сигналы, которые открывают
. управляемые ключи 29 и 30, и источник постоянного напряжения 35 подключает- ся к фиксаторам 9 и 10, поэтому вязкость жидкости между фольгой 27 и корпусом б шарнира максимальна, и возникающие силы вязкого трения фиксируют положение дисков 23 и 25 фрик- ционных элементов 11 и 13 относительно корпуса 6. Положение диска 24 также фиксировано, так как упругие элементы 26 препятствуют его вращению относительно дисков 23 и 25, по- этому положение оси 7 и звена 3,жестко связанных с диском 24 фрикционного элемента 12, также фиксировано.
Дпя перемещения схвата 17., установленного на звене 3, в заданное по-
ложение с соответствующего выхода устройства управления манипулятором на адресный вход 36 схемы управления соответствующего блока 28 управления фик саторами подается соответствующий
,код заданного положения соответствующего звена манипулятора. Пусть, нап. ример, необходимо переместить звено
. 3 в заданное положение, двоичньй код которого с выхода устройства -управ- ления манипулятором поступает на ад- ресный вход 36. Аналоговый сигнал текущего положения звена 3, контро- лируемьй с помощью датчика 15, поступает на вход 33 АЦП, с выхода кото- рого двоичный код текущего положения поступает на информационный вход. схемы 34 сравнения, где происходит сравнение двоичного кода текущего
положения звена 3 с заданным. Результат сравнения кодов появляется на соответствующем выходе схемы 34 сравнения в виде единичного сигнала. Так, например, если звено 3 необходимо переместить по часовой стрелке (смотря с конца вектора ОХ), то появляется единичный сигнал (высокий уровень напряжения) на выходе Меньше схемы 34 сравнения. Если звено 3 необходимо переместить против часовой стрел ки, то появляется единичный сигнал на выходе Больше схемы 34 сравнения, а если звено 3 находится в заданном положении, то появляется единичньй сигнал на выходе 37 Равны схемы управления. Пусть, например, звено 3 необходимо переместить по часовой стрелке, тогда на выходе Меньше схемы 34 сравнения появляется единичный сигнал, постзтающий на первый вход элемента И 31, а на остальных выходах схемы. 34 сравнения устанавливаются нулевые сигналы. Нулевой сигнал с выхода 37 Равны схемы 34 сравнения поступает на соответствующий вход устройства управления манипулятором и указьгоает на то, что звено 3 находится не в заданном положе- 1ши, тогда устройство управления манипулятором формирует на соответствующем выходе единичный сигнал, который подается на вход 38 Пуск блока 28 упра ления фиксаторами. На выходе элемента И 3 1 устанавливается единичный сигнал, которьш открывает управляемьй ключ 29 и источник 35 высокочастотного напряжения подключается к зшравля- ющему входу фиксатора 9 (пьезо- или магнитострикционньй элемент), который начинает вибрировать с высокой частотой, а поэтому силы сопротивле шя между фиксатором 9 и диском 23 фрикционного элемента 11 минимальны, и диск 23 совместно с диском 24 может вращаться вокруг оси 7 шарнира 5 по часовой стрелке, так как при этом положение диска 25 фрикционного элемента 13 фиксировано, потому что на выходе элемента И 32 имеется нулевой сигнал и управляемый ключ 30 закрыт, а значит, источник 35 высокочастотного напряжения отключен от фиксатора 10, которьш препятствует вращению диска 25 фрикционного элемента 13 относительно корп уса 6 шарнира 5,
Аналогично, если фиксатором является электрореологическая жидкость.
то наличие единичных сигналов одно- временно на обоих входах элемента ИЛИ-НЕ 31 приводит к установке нулевого сигнала на его выходе, закрытию ключа 29, и источник 35 постоянного напряжения отключается от фиксатора 9, а значит, электрореологическая жидкость, находящаяся в пространстве между диском 23 и корпусом 6 шарнира 5, имеет небольшую вязкость, т.е. минимальны силы вязкого трения между фиксатором 9 и фрикционным элементом 11, и диск 23 совместно с диском 24 может вращаться вокруг оси 7 шарнира 5 по часовой стрелке, так как при этом положение диска 25 фрикционного элемента 13 фиксировано, потому что на выходе элемента И-НЕ 32 имеется единичный сигнал, и управляемый ключ 30 открыт, а значит, источник 3 постоянного напряжения подключен к фиксатору 10, и электрореологическая жидкость в пространстве между диском 25 и корпусом 6 имеет максимальную вязкость.
Затем по команде от устройства управления манипулятором производитс включение вибродвигателя, вызывающег динамическое усилие Р т. о - г, имеющее две составляющие Р и „ (фиг.4), где Р Р ; PZ Р з1пЦ составляющая вектора Р, направленная вдоль оси звена 3; Р Р coscf - составляющая вектора Р, направленная перпендикулярно оси звена 3; m - масса эксцентриков; со - круговая частота вращения эксцентрика; г - средний радиус вращения центра масс эксцентрика; ц со t + - угол меледу направлением перемещения конца звена 3 и направлением динамического уси- ,лия Р в момент времени t; - то же, что Cf при t 0; А - точка приложения динамического усилия Р к концу звена; В - ось вращения шарнира 5.
Когда направление вектора Рц Противоположно направлению вектор а OY (полагают, что система координат OXYZ жестко связана с подвижным звеном 3), то кинетическая энергия звена 3, перемещающаяся с ускорением вибрации, превращается в потенциальную энергию деформации упругих элементов 26,,которые изгибаются. Если направление вектора Р(. совпадает с направлен|1ем вектора OY и вектор Р превосходит по модулю сзгммарные силы сопротивления движению звена 3, то конец звена 3 вращается по часовой стрелке с ускорением вибрации. Кроме того, потенциальная энергия деформации упругих элементов 26 при их вьш- рямпении преобразуется в кинетическую энергию движения звена 3, т.е. конец звена 3 получает дополнительное ускорение,-упругие элементы 26 выполняют роль привода, который периодически вьщает и аккумулирует энергию. Таким образом происходит микроперемещение конца звена 3 в заданное
положение.
-
Наличие составляю1Ц й Р вектора динамического усилия Р приводит к периодическому сжатию или растяжению звена 3 вдоль его оси в зависимости от направления вектора Р, т.е. предлагаемый манипулятор имеет достаточно жесткую конструкцию, что обуславливает его высокую точность позиционирования.
При достижении концом звена 3
заданного положения на выходе 37 Равны схемы 34 сравнения устанавливается единичный сигнал, а на выходах Больше и Меньше устанавливаются нулевые сигналы, поэтому управляемые ключи 29 и 30 закрыты, если применяются фиксаторы 9 и 10 из пьезо- или магнитострикционных материалов, или открыты, если применяются фиксаторы из реологического вещества, а значит, положение фрикционных элементов 11 и 13 фиксировано относительно корпуса 6 шарнира 5 и звено 3 удерживается в заданном положеНИИ.
Единичный сигнал с выхода 37 Равны поступает на соответствующий, вход устройства управления манипуля- тором, после чего на входе 38 Пуск
устанавливается нулевой сигнал, а вибропривод 16 по команде от устрой- ства управления манипулятором отключается .
Формула изобретения
Манипулятор, содержащий основание, на котором установлены последовательно расположенные и шарнирно связан- ные между собой звенья, первое из которых также шарнирно. связано с основанием, а на последнем смонтирован схват, каждый из указанных шарниров снабжен устройством взаимцой
фиксации положения соединяемых им звеньев, вибрационный привод и система управления с датчиками, о т л и - ч ающийся тем, что,с целью повьшения надежности за счет уменьшения количества приводов для обеспечения перемещения звеньев в одной плоскости, каждый шарнир вьтолнен в виде вращательной кинематической пары, состоящей из корпуса, закрепленного на предьщущем звене, и вала, жестко связанного с последующим звеном, причем оси всех указанных валов параллельны, а устройство взаимной фиксации звеньев в каждом шарнире выполнено в виде трех соосно и последовательно расположенных дисков и двух фиксаторов, причем два крайних диска размещены на валу с возможностью вращения относительно него, а средний диск связан с валом жестко и на торцах зтого диска закреплены упругие элементы, контактирующие с соответствующими торцами крайних дисков, а упомянутые фиксаторы смонтированы на корпусе шарнира с возможностью взаимодействия с боковыми поверх- ностями крайних дисков, при этом датчики обратной связи по положению звеньев размещены в шарнирах, а привод выполнен в виде эксцентрикового вибратора и размещен на последнем зве- не так, что ось эксцентриков параллельна осям шарниров.
2. Манипулятор по п.1, о т л и- чающийся тем, что фиксаторы выполнены в виде пьезо- или магнито- стрикционного элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU743861A1 |
| Сустав манипулятора | 1984 |
|
SU1192972A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Расточная головка с автоматическим управлением размером обработки | 1987 |
|
SU1657281A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2015 |
|
RU2615940C1 |
| Привод ткацкого станка | 1977 |
|
SU660600A3 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2022 |
|
RU2821977C2 |
| Манипулятор | 1989 |
|
SU1673429A1 |
| Устройство для программного управления манипулятором с шестью степенями подвижности и линейно перемещаемым основанием | 2022 |
|
RU2792279C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ И ЛИНЕЙНО ПЕРЕМЕЩАЕМЫМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОСНОВАНИЕМ | 2022 |
|
RU2794082C1 |

ZifZB
фиг. I
Редактор Л.Повхан
Составитель Ю.Вильчинский
Техред И,Попович Корректор М.Шаррши.
Заказ 3913/17Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
.Производственно-полиграфическое предприятие, т. Ужгород. ул. Проектная, А
PU9.ff
