I
Изобретение относится к машиностроению, а именно к манипуляторам для механизации основных и вспомогательных операций в промьшенности.
Цель изобретения - упрощение конструкции и повьппение точности позиционирования путем выполнения привода поворота одного из звеньев с вибродвигателем.
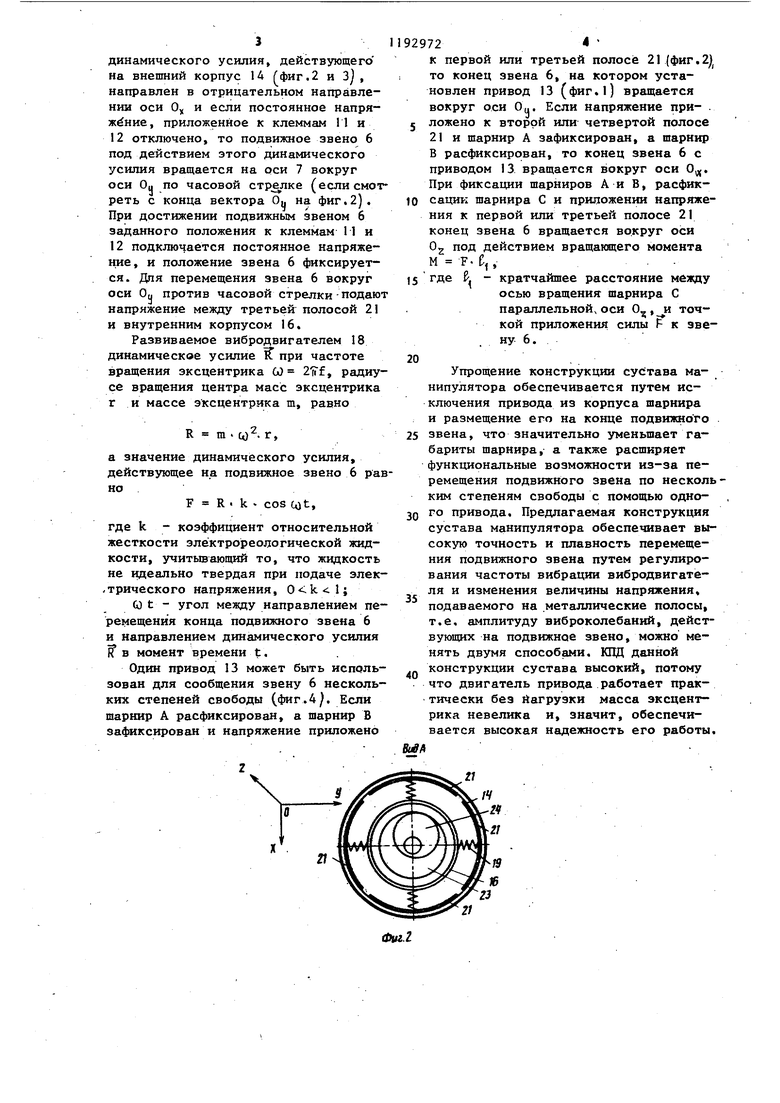
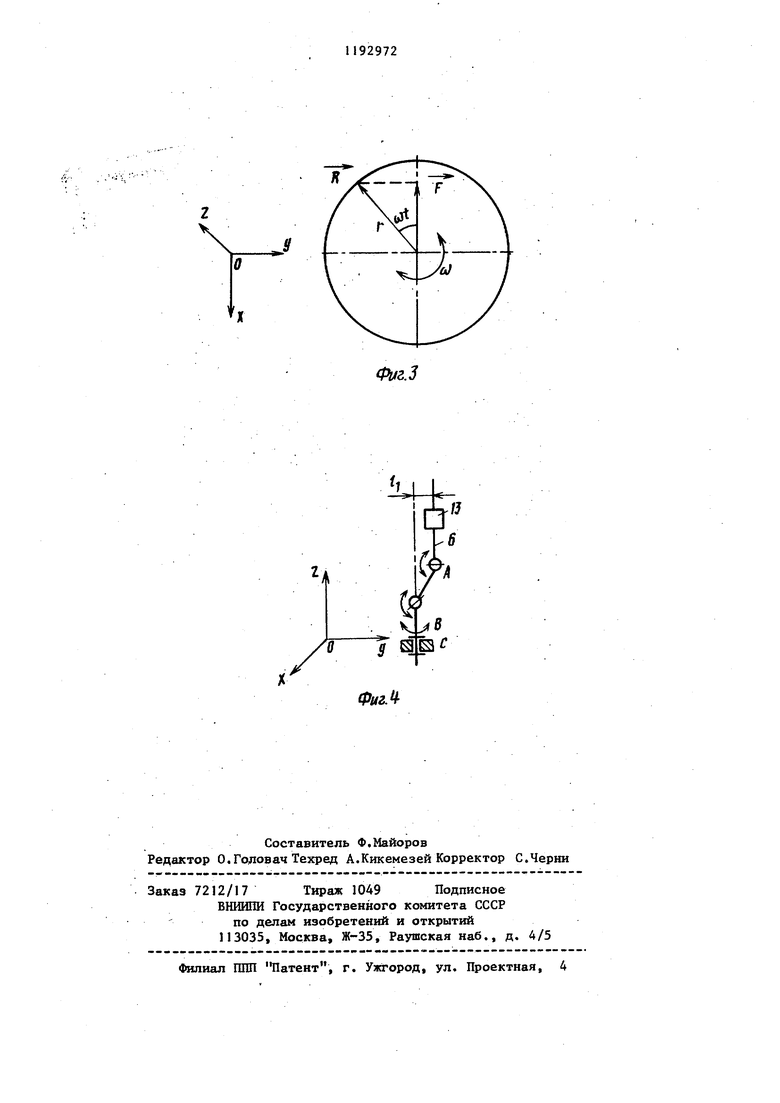
На. фиг.1 изображен сустав манипулятора; на фиг,2 - вид А на фиг.1; на фиг. 3 - вектор11ая диаграмма динамического усилия R, создаваемого вибpoдвигaтeлeмJ, и значения динамического усилия F, действукицего на подвижное звено; -на фиг.4 - кинематическая схема использования привода с тремя шарнирами.
Сустав манипулятора содержит неподвижное звено 1, жестко связанное с корпусом 2, к которому крепятся две крьшки 3 с помощью винтов 4 с пружинными шайбами. Между крьшкой 3 и корпусом .2 установлена уплотнительная прокладка 5. Подвижное зве. но 6 закреплено на оси 7, сна:бженной дисками 8, находящимися в электрореологической жидкости 9. Ось 7 опирается на две втулки 10, изготовленные из диэлектрического материала с высокой износостойкостью и низким коэффициентом трения, например, капрона. На корпусе 2 и подвижном звене 6 установлены клеммы соответственно II и 12 привода 13 поворота подвижного звена. Привод 13 содержит внешний цилиндрический корпус 14 из диэлектрического материала, закрепленный на подвижном звене 6, например, с помощью клея. На внешний корпус 14 навинчена крьш1ка 15 из диэлектрического материала. Коаксиально корпусу 14 расположен корпус 16 с герметичной крьшпсой 17. -Вибродвигатель 18, например эксцентриковый, закреплен во внутреннем корпусе 16. Последний выполнен из токопроводящего материала и закреппен на внешнем корпусе 14. с помощью четырех пружин 19, гальванически изолированных от корпуса 14.
Пространство между внешним 14 и внутренним 16 корпусами заполнено зяектрореологической жидкостью 20. На внутренней поверхности внешнего корпуса 14 параллельно его образующей закреплены четьфе полосы 21 из токопроводящего материала, гальванически изолированные одна от другой.
929722
Полосы установлены с возможностью подключения к источнику высокого напряжения (не показано с помощью вьшодов 22. Вибродвигатель 18 состоит из электродвигателя 23 и эксцентрика 24 (фиг.2}, жестко закрепленного на валу ротора электродвигателя 23.
Сустав манипулятора работает следующим образом.
Жесткую фиксацию подвижного звена 6 относительно неподвижного звена 1 осуществляют путем подачи постоянного напряжения от источника питания
5 (не показано) на клеммы 11 и 12. При этом изменяется вязкость электрореологической жидкости 9, возникают демпфирующие силы вязкого трения, зависящие от величины прикладьшаемого
0 напряжения. Параметры жидкости 9 подбирают таким образом, чтобы обеспечить необходимое сцепление ее с диском 8, что, в свою очередь, обеспечивает необходимое затухание колеба5 НИИ массы подвижного звена 6, причем, эти параметры выбраны с учетом массы (момента инерции ) объекта манипулирования, связанного с этим звеном непосредственно или через другие звенья.
0 Перемещение подвижного звена 6 относительно неподвижного звена 1 осуществляется при подаче постоянного напряжения от источника питания (не .показан) между внутренним корпусом . 16 и по крайней мере одним из выводов 22. При этом вибродвигатель 18 Представляет .собой волновой вибро- двигатель вращательного движения.
Если ни к одному из вьшодов 22 ,
0 постоянное напряжение не прилагается, то вязкость жидкости 20 минимальная, и колебания, создаваем.ые вибродвигателем 18 путем вращения с угловой скоростьюСО эксцентрика 24, находящегося на оси ротора электродвигателя 23, затухают из-за наличия демпфера между внешним 11 и внутренним 16 корпусами в виде пружин 19, находящихся в жидкости 20. Если напряже0 кие прилагается к одному из выводов 22, который связан, например, с первой полосой 21, то жидкость 20, находящаяся в пространстве мезеду первой полосой 21 и внутренним корпусом
5 16, твердеет, и механические колебания от внутреннего корпуса 16 через затвердевшую жидкость передаются к внешнему корпусу 14. Максимум : динамического усилия, действующего на внешний корпус 14 фиг.2 и З, направлен в отрицательном направлении оси 0 и если постоянное напряжение, приложенное к клеммам 11 и 12 отключено, то подвижное звено 6 под действием этого динамического усилия вращается на оси 7 вокруг оси 0ц по часовой стралке (если смот реть с конца вектора Оц на фиг.2). При достижении подвижным звеном 6 заданного положения к клеммам 11 и 12 подключается постоянное напряжение, и положение звена 6 фиксируется. Для перемещения звена 6 вокруг оси Оц против часовой стрелки-подаю напряжение между третьей полосой 21 И внутренним корпусом 16. Развиваемое вибродвигателем 18 динамическое усилие при частоте вращения эксцентрика G) 2гГ, радиу се вращения центра масс эксцентрика г и массе эксцентрика т, равно R m ад г а значение динамического усилия, действующее на подвижное звено 6 ра но F R k cos cot, где k - коэффициент относительной жесткости элёктрореологической жидкости, учитьшающий то, что жидкость не идеально твердая при подаче элек -трического напряжения, Q t - угол между направлением пе ремещения конца подвижного звена 6 и направлением динамического усилия R в момент времени t. . Один привод 13 может быть исполь зован для сообщения звену 6 несколь ких степеней свободы (фиг.4. Если шарнир А расфиксирован, а шарнир В зафиксирован и напряжение приложено
11
23
21 72 к первой или третьей полосе 21 (фиг.2) то конец звена 6, на котором установлен привод 13 (фиг.1) вращается вокруг оси 0ц. Если напряжение при- . ложено к второй или четвертой полосе 21 и шарнир А зафиксирован, а шарнир В расфиксирован, то конец звена 6 с приводом 13 вращается вокруг оси 0. При фиксации шарниров А-и В, расфик- сацик шарнира С и приложении напряжения к первой или третьей полосе 21 конец звена 6 вращается вокруг оси О под действием вращакяцего момента M F.e,, . . где f-. - кратчайшее расстояние меязду осью вращения шарнира С параллельной, оси 0,и точкой приложения силы F к звену 6. Упрощение конструкции сустава манипулятора обеспечивается путем исключения привода из корпуса шарнира и размещение его на конце подвижного звена, что значительно уменьшает габариты шарнира, а также расширяет функциональные возможности из-за перемещения подвижного звена по несколь КИМ степеням свободы с помощью одного привода. Предлагаемая конструкция сустава манипулятора обеспечивает высокую точность и плавность перемещения подвижного звена путем регулирования частоты вибрации вибродвигателя и изменения величины напряжения, подаваемого на металлические полосы, т.е. амплитуду виброколебаний, действующих на подвижное звено, можно менять двумя способами. КПД данной конструкции сустава высокий, потому что двигатель привода работает практически без йагрузки масса эксцентрика невелика и, значит, обеспечивается высокая надежность его работы.
Я
Ф1лг.З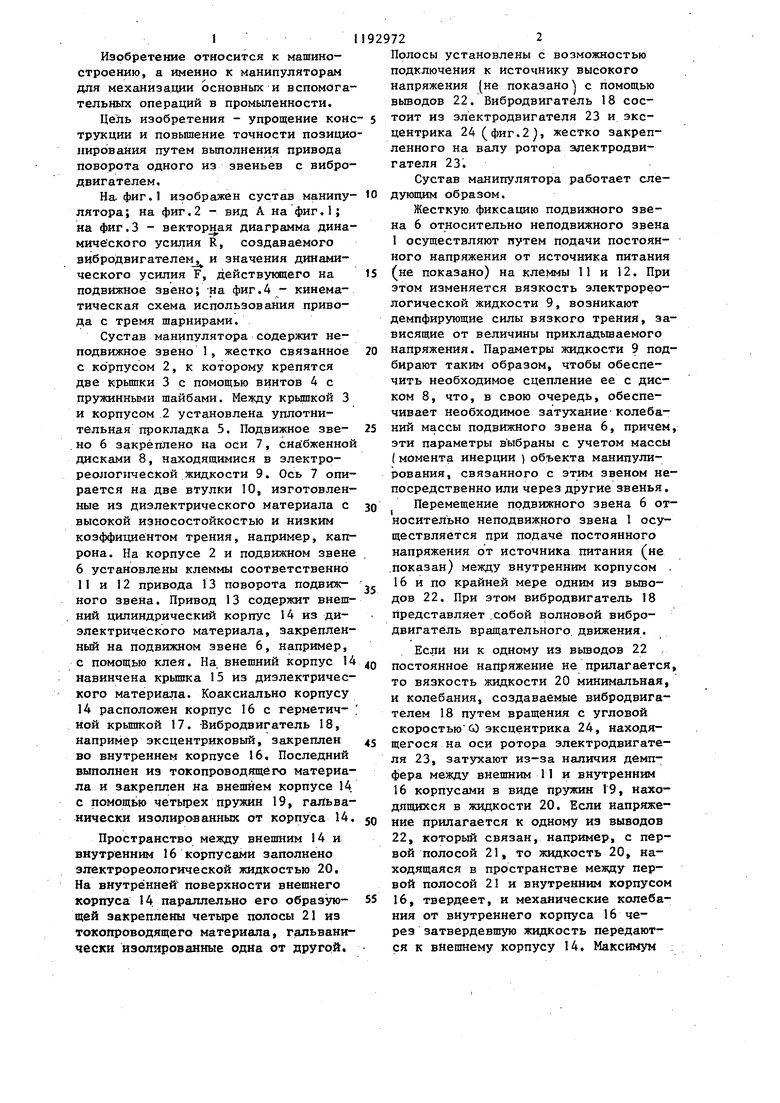
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1333570A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
| Электромеханический сустав манипулятора | 1980 |
|
SU975396A1 |
| ТАЗОБЕДРЕННЫЙ СУСТАВ ЭКЗОСКЕЛЕТА | 2013 |
|
RU2549015C2 |
| РОБОТИЗИРОВАННЫЙ ТРЕНАЖЕР ДЛЯ ЛЮДЕЙ С НАРУШЕНИЯМИ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2604038C1 |
| Манипулятор | 1989 |
|
SU1673429A1 |
| Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы | 2023 |
|
RU2818704C1 |
| ПРОТЕЗ БЕДРА | 2016 |
|
RU2617268C1 |
| СУСТАВ МАНИПУЛЯТОРА | 1972 |
|
SU428935A1 |
| Сустав манипулятора | 1986 |
|
SU1397281A1 |
СУСТАВ МАНИПУЛЯТОРА, содержапщй шарнир для соединения смежных звеньев, корпус, имеющий по крайней мере одну полость, заполненную электрореологической жидкостью, в которой расположен диск, связанный с концом одного из звеньев и привод поворота этого звена, отличающийся тем, что, с целью упрощения конструкции и повьшекия точности позиционирования, привод поворота звена выполнен в виде двух подпружиненных один к другому в радиальцом направлении и коаксиально расположен.ных цилиндрических корпусов, пространство между которыми заполнено электрореологической жидкостью, вибррдвигателя, закрепленного в внутреннем корпусе, и полос из токопроводящего материала, расположенных на внутренней поверхности внешнего корS пуса параллельно общей оси цилиндри(Л ческих корпусов, при этом привод установлен на другом конце этого эвена. ZJ /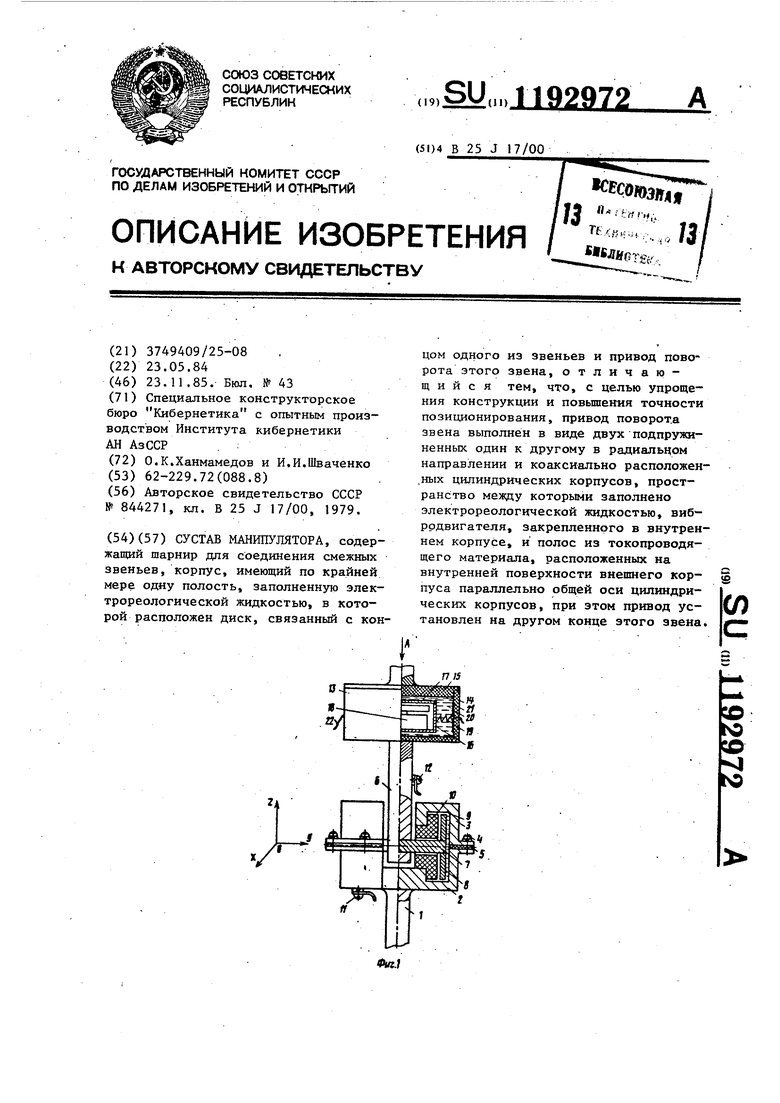
| Сустав манипулятора | 1979 |
|
SU844271A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
