Изобретение относится к идентификации объектов управления и может быть применено для экспериментального определения характеристик линейных объектов управления, входящих, .например, в систему автоматического регулирования или самонастраивающуюся систему.
Цель изобретения родействия системы.
На чертеже представлена блок-схема системь идентификации линейных объектов.
ческой настройки 7 по итеративному алгоритму, например
(.(3)
Выход первого сумматора 4 и второго блока параметрической настройки 7 подается на элемент 8 произведения, повьшение быст- ю который осуществляет перемножение
. . N. величин ZI U n .
.
Второй сумматор 5 осуществляет
Система состоит из объекта управ- 15 суммирование величин и
PIJJI-I , Т.е. вычисляет величину выхода модели согласно вьфаже- нию (1).
ления 1, вход которого подключен к входу модели объекта 2, входу первого блока 3 параметрической настрой- ки и первого сумматора 4, выход модели через второй сумматор 5 соединен с входом элемента 6 сравнения, второй вход которого соединен с выходом объекта 2, выход элемента 6 сравнения соединен с вторыми входа ми первого 3 и второго 7 блоков параметрической настройки, второй вход которого соединен с выходом первого сумматора 4, выход второго блока 7 параметрической настройки подключен к,первому входу элемента 8 произведения, второй вход которого подключен к выходу первого сумматора 4, выход элемента произведекгия 8 соединен с вторым входом второго сумматора 5.
Система идентификации линейных объектов работает следующим образом.
Входные сигналы U п подаются на вход модели 2, первого блока параметрической настройки 3, первого сумматора 4.
Модель объекта управления представляется в виде
Y,W (B n-ll-b , (1)
где I - единичный вектор размером N 1, В п - вектор оцениваемых параметров, вычисляемьй в первом блоке параметрической настройки 3 по итеративному алгоритму, например
В п в п-1 +г (Y И -YM М) и п :(2
где r-(N-N) -диагональная матрица весовых коэффициентов} р п - общая составляющая параметров модели, вычисляемая во втором блоке параметрисуммирование величин и
PIJJI-I , Т.е. вычисляет величину выхода модели согласно вьфаже- нию (1).
Учитьтая, что параметры модели представляют собой согласно (1) сум- му двух переменных составляющих, то результирующий вектор параметров модели вычисляется по выражению
25
C n-l +rU nI+ylI U n)- .(,.
(4)
Таким образом, при N 4 предлагаемая система обеспечивает по сравнению с прототипом более высокое быстродействие.
5
0
0
5
Формула изобретения
Система идентификации линейных объектов, содержащая модель объекта, подключенную информационньм входом к входу объекта, а параметрическим входом - к выходу блока параметрической настройки, информационный вход которого соединен с входом объекта, а управляющий - с выходом элемента сравнения, подключенного первым входом к выходу объекта, отличающаяся тем, что, с целью повы- g шения быстродействия, система содержит пдследовательно соединенные первый сумматор и второй блок параметрической настройки, последовательно соединенные элемент умножения и второй сумматор, подключённый вторым входом к выходу модели объекта, а выходом - к второму входу элемента сравнения, соединенного выходом с параметрическим входом второго блока настройки, выход которого подключен к второму входу элемента умножения, входы первого сумматора соединены с входами объекта, а выход - с вторым входом элемента умножения.
ULn
УМ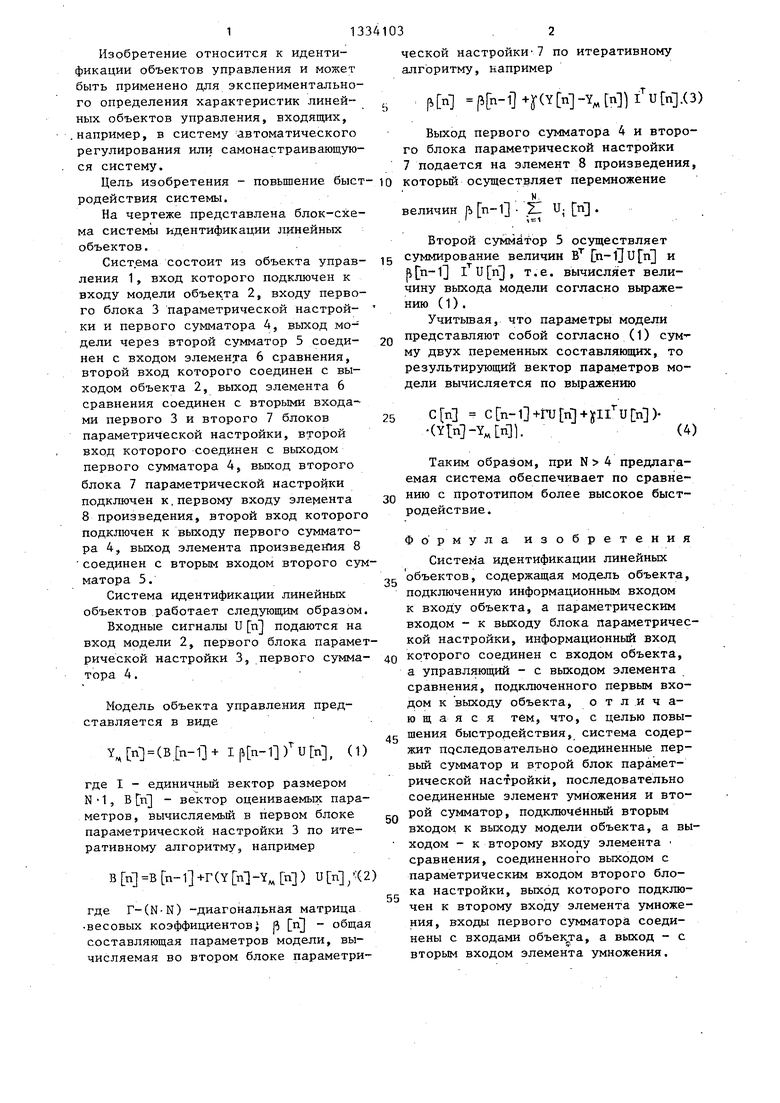
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической идентификации | 1985 |
|
SU1308983A1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| Система индентификации параметров объекта | 1977 |
|
SU703779A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| Устройство для идентификации параметров объекта | 1981 |
|
SU987580A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU935875A1 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| Идентификатор параметров двумерного объекта | 1981 |
|
SU995065A1 |
Изобретение относится к техни-. ке идентификации линейных объектов управления. Цель - повьшение быстродействия - достигается тем, что система имеет два контура параметрической настройки. Первый контур параметрической настройки осуществляет перестройку вектора параметров модели объекта. Второй контур параметрической настройки осуществляет оценку общего параметра, позволяющую минимизировать общую составляющую параметрических ошибок объекта и мод ели. 1 ил. со 00 4;
x
Редактор М Товтин
Составитель A. Лащев .Техред И.Попович
Заказ 3959/43
Тираж 863Подписное
ВНИИПИ Государственного комитета GCCP
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
B Cn-fJi/rnJ
y flftj
ft л-1
Корректор Л.Пилипенкр
| Патент Великобритании № 1436758, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 0 |
|
SU361456A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| , | |||
