1
Изобретение относится к автоматике. Способ может быть применен для определения математической модели объекта, например линейного, только на основе информации о случайных сигналах на его входе и выходе.
Известен способ идентификации объекта, например линейного, динамического, сущность которого состоит в следующем.
Линейную математическую модель динамического объекта можно представить разностным уравнением:
У1 - 0 X1-1+ 2 гУ1-г.(1)
где уг - величина сигнала на выходе
объекта в t-том такте; Xi - величина сигнала на входе объекта в i-TOM такте; й-1, Ьг - коэффициент математической
модели объекта. Если определить векторы
- вектор параметров объекта.
W
b, Ь,
xi-l
Xi-k
- вектор состояния.
yt-i yi-2
10 yt-m
ТО (1) МОЖНО записать в виде скалярного произведения:
(2)
В соответствии с известным способом идентификацию осуществляют по следующей интерационной формуле:
Г/ i7 , lyi-(Vi-i(Ji)L ,„,
20УI - Vi-i + а , (3)
Ui
Т ч
- вектор параметров модели объекта, полугде 1/; чаемой в результате идентификации;
-Vk+mt30
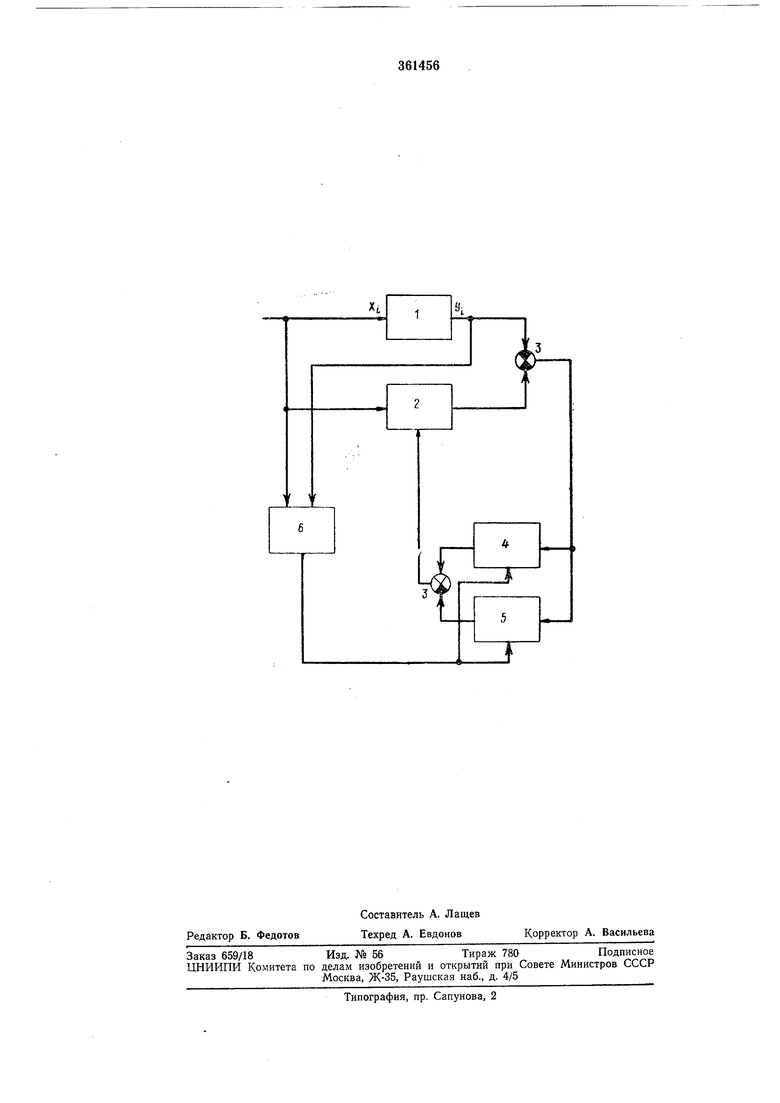
а - настроечный коэффициент. В процессе идентификации по известному способу координаты вектора Vi должны шаг за шагом приближаться к соответствующим координатам вектора W. При нулевых начальных условиях выражение (3) можно представить в виде: yi-(Vj,iUj)Uj - (4) Uj II Из (4) видно, что параметры модели объекта корректируются в зависимости от интеграла (дискретного) от величины, пропорциональной разности сигналов на выходах объекта и искомой его математической модели. Недостатком известного способа является относительно невысокое быстродействие идентификации. Цель изобретения - ускорение идентификации. Достигается она тем, что параметры линейной модели корректируют также по текущей величине разности сигналов на выходах объекта и его линейной модели. Для идентификации используют формулу: {.(Vjmuj I yi-(ViVi)Ui где а1иа2 - настроечные коэффициенты, подбираемые экспериментально. Структура системы, реализующей предложенный способ, изображена на чертеже. Входной сигнал Xi поступает одновременно на входы объекта идентификации / и настраиваемой модели 2. Сигналы на выходе модели и объекта сравнивают, например, с помощью алгебраического сумматора 3. Разность этих сигналов подают на вычислительные блоки 4 и 5. Сигналы xt и Уг подают также на вход запоминающего устройства 6, где запоминаются координаты вектора состояния U. Значения координат вектора U также подают в вычислительные блоки 4 к 5. Блок 4, являющийся, например, дискретным интегратором, рассчитывает величину yj(VjUj)Uj . ,0II ; II Блок 5 рассчитывает величину „ yi-(ViUi)Ut а,г-:; . II Ui II Суммируя сигналы на выходах блоков 4 и 5, получают значения вектора Vi, координаты которого делают новыми значениями параметров настраиваемой модели. Процесс идентификации продолжают до тех пор, пока результат сравнения сигналов на выходе объекта/и модели 2 не становится равным «О. При этом параметры модели становятся равными искомым параметрам объекта. Предмет изобретения Способ идентификации линейного объекта, основанный на коррекции параметров подстраиваемой модели сигналом, пропорциональным интегралу разности сигналов с выходов объекта и подстраиваемой модели, отличающийся тем, что, с целью ускорения процесса идентификации, определяют разность сигналов с выходов объекта и модели, суммируют ее с сигналом, пропорциональным интегралу разности сигналов, и полученным сигналом управляют параметрами подстраиваемой модели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для идентификации объекта | 1979 |
|
SU960741A1 |
| Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта | 2017 |
|
RU2674572C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1995 |
|
RU2097818C1 |
| Бесплатформенная инерциальная навигационная система подвижного объекта | 2017 |
|
RU2676941C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ ВЕРОЯТНЫХ ЗНАЧЕНИЙ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2530748C2 |
| Бесплатформенная инерциальная навигационная система подвижного носителя | 2018 |
|
RU2682060C1 |
| Устройство для управления многомерным объектом | 1976 |
|
SU646309A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПЕРВИЧНОЙ ПЕРЕРАБОТКИ НЕФТИ В СЛОЖНОЙ РЕКТИФИКАЦИОННОЙ КОЛОННЕ | 1990 |
|
RU2040294C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНЫХ ОБЪЕКТОВ УПРАВЛЕНИЯ | 1994 |
|
RU2079870C1 |
| Устройство для отображения информации | 1990 |
|
SU1817132A1 |