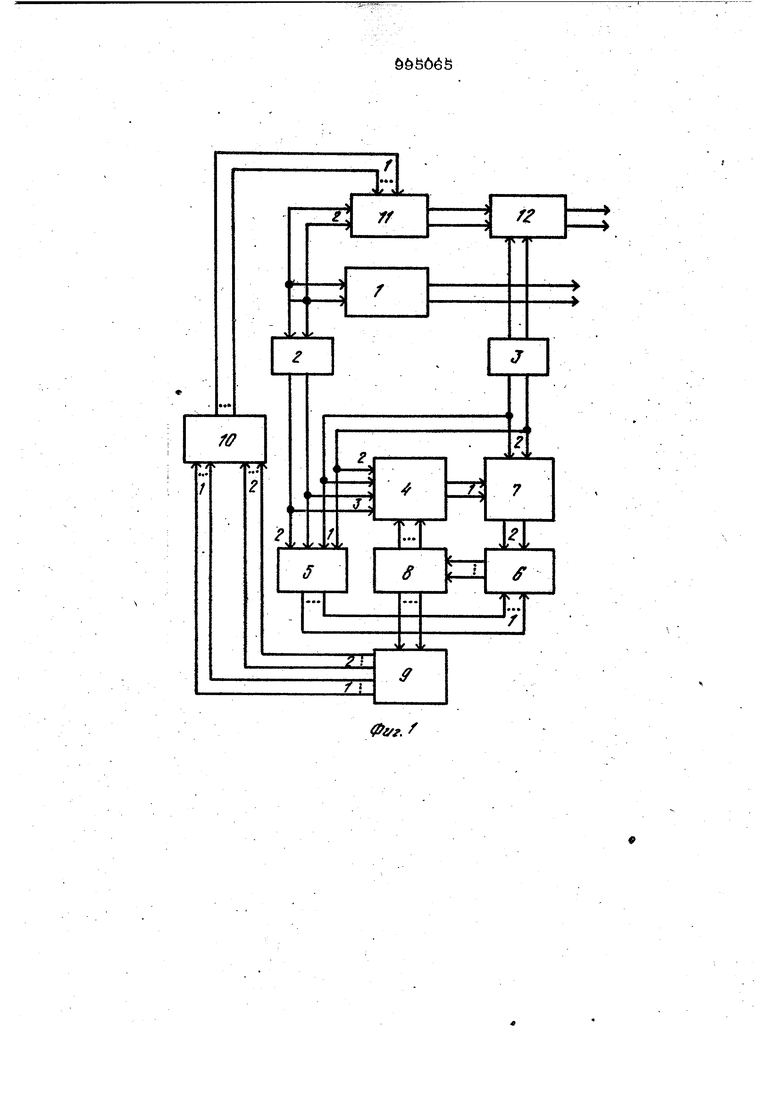
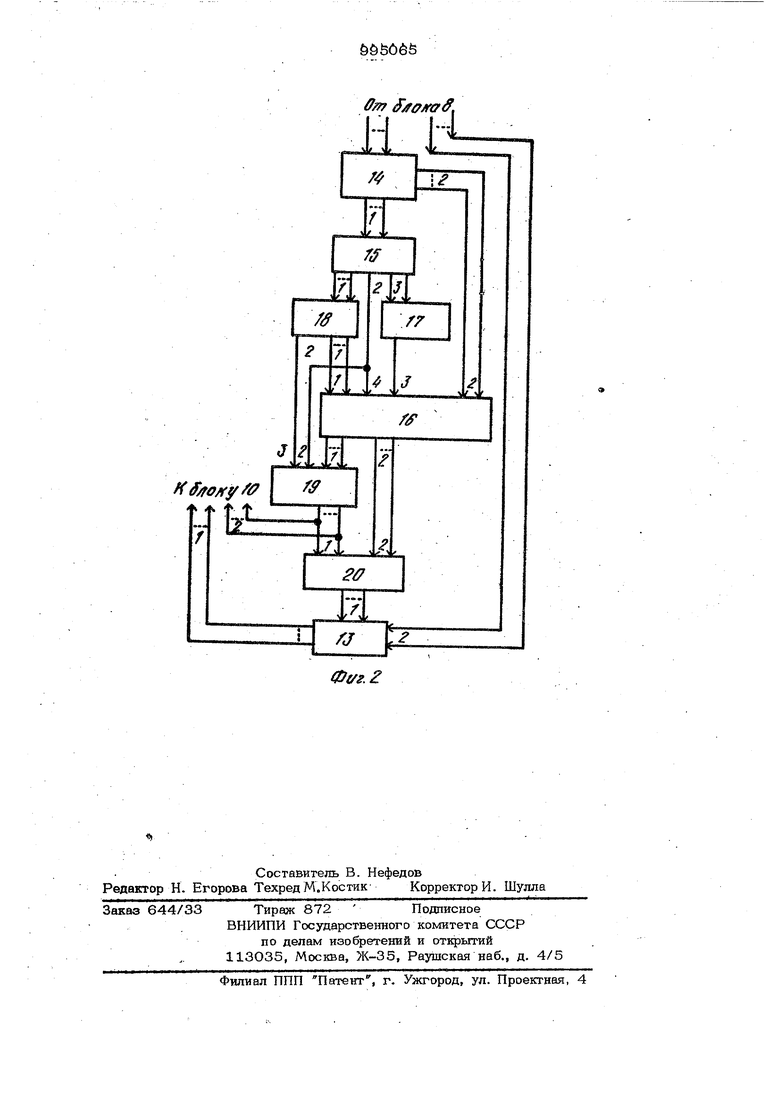
Изобретение относится к адаптивному управлению динамическими объектами и может найти применение при проектировании автомаггическюс систем и определении экспериментальных характеристик объектов управления. Известен идентификатор параметров линейных дискретных объектов til . вычисляющий оценки Д и Ь матриц Л и В размера 2x2 объекта, динамика которого описьтается дифференциальным уравнением.. iS A-S+bu ,U) где и 14/- измеряемые векторы (2x1) соответственно состояния объекта и управления. Применение цифровых идентификаторо обрабатывающих дискретную информацию (} ,М t-t);t ОД,..., предусматривает квантование с некоторой частотой Q 1/Т (Т-период дискретности) -посре ством амплитудно-импульсных модуляторов непрерывньЕс входной U и въссодной i) переменных. В результате осуществлй-ется идентификация параметров f и О дискретной модели - i(.-t-H)FNCt)tCiOy:) , С2) которые связаны с параметрами нопрерьюкой модели соотношениями ,-Л-А-ЧР-ОБ,,М2, 1(3) Представим векторно-матричное уравнение (2) в виде двух скалярных уравнений )(.th,),j(t)(t)-q.2.J,a), )Sa,tOtfaa aW+%.iUiW q-iaUi№). V. .Тогда очевидно, что вводя вектор измерений;U4-t)-D),(Wa(Ull.(A)Uo.U)3 и векторы оцениваемых параметров . ai i Al a rMQ-ia , Oa-Uai aa a ail (штрих-знак транспонирований), получим две модели: i t+i)v(,-t)a, N4Ct4-)--v(4)ai, йри этом для иЬенто кадии параметров dvj и d можно использовать эти устройства идентификадии параметров яинейньсс дискретных динамических объектов. Общим недостатком этих устройств является то, что входные и выходные переменные объекта должны подаваться в дискретном виде, поэтому непосредст венное использование устройств для идентификации непрерывного объекта не представляется возможным. Наиболее близким по технической сущности к предлагаемому является иден тификатор, содержащий первый амплитудно-импульсный модулятор и последовательно соединенные второй амплитудноимпульсный модулятор, блок вычисления векторного коэффициента передачи, первый блок умножения, первый блок настройки, дискретную модель и первый блок сумматоров, подключенный вторым вх дом к выходу второго амплитудно-и /(пуяь його модулятора и второму входу дискретной модели, а выходом - ко второму входу первого блока умножения, первый амплитудно-импульсный модулятор подключен выходом ко второму входу блока вычисления векторного коэффициента передачи и третьему входу дискретной модели, а кходомг - ко входу обьеюта, выход которого подключен ко юсоду вто, рого амплитудно-импульсного модулятора 2 . Известный идентификатор осуществляет идентификацию параметров Q в линейном объекте вида J ) - N/C-t) ОПрименение известного устройства noa-i воляет идентифицировать элементы матриц и G , входящие в векторы О посредством реализации соотноще- с|,Ш--01,а-1).)ЕнШ, .(att)-6,,(M)4tt)E,i(-t), где Е,lt))-vCt)a,HH), E iCt}--ViC-t;-v(t)OiiCiсигналы разности между выходами объекта и дискретных моделей, C),(i),. (tjвекторный коэффициент усиления, ,(Vi(i:}--l51gfHV,-(t)}/JJV(i)ll,; Недостатки известного устро:Вства состоят в том, что оно не позволяет, во-первых, определить параметры объекта к форме непрерьюной модели и, во-вторых, - контролировать в реальном времени качество идентификации. Д ейст&64 вительно, вычисляемые в блоке настройки параметров дискретной модели значения не позволяют судить о параметрах А и Б исследуемого объекта, вследствие чего нельзя также анализировать динамику и точность процессов оценивания. Цель изофетения - расширение функциональных возможностей устройства. Для достижения этой цели в идектификатор включены последовательно соединенные блок вычисления параметров непрерывной модели, второй блок наст. ройки, непрерьтная модель и второй блок сумматоров, соединенный вторым 1зходом с выходом объекта, Ксод которого подключен ко второму входу непрерывной модели, второй выход блока вычисления параметров непрерьюной модели подключен ко второму входу второго блока настройки. Кроме того, для обеспечения уодентификации в реальном масштабе времени блок вычисленная параметров непрерывной модели содержит первый функциональный преобразователь и последовательно соединенные блок вычисления . констант, логический блок, второй функ-j цирнагаьнъ1й преобразователь, второй блок умножения, третий блок сумматоров, первый блок умножения матриц и второй блок умножения матриц, подключенный вторым входом к выходу первого блока настройки и ко входу блока вычисления констант, второй выход котор огр подключен ко второму входу второго блока умножения, подключенного вторым выходом ко второму вход первого бло1са умножения матриц, третьим входом - к Шзгходу первого функционального преобразователя, четвертым входом - ко второму выходу логического блока и второму входу третьего блока сумматоров, третий вход которого соединен со вторым выходом второго функционального преобразователя, а выход - со вторым входом второго блока настройки, подключенного первым входом к выходу второго блока умножения матриц, вход первого функционального преобразователя соеди нен с третьим выходом логического блока. Устройство осуществляет идентификацию параметров дискретной модели, а также на основании соотношений (3) решает; задачу определения матриц А и В объекта по вычисленным значениям матриц и G Используя интерполяционный полином Лагранжа - Сильвестра, можно найти, что А -- itv, F -- i (ей X, ТЙ.tviH,, ip ) (4 К ТTV гЛи / где Т - единичная матрице; Хн и Адхарактеристические числе матрицы F , которые в случае дебствительньсс значвШ1 равны X -ci-t- р, в случае комплексшых значений- sol+);X2sdl ppj , здесь i,.)/2; jb-VIc: 34,aC f,iai-€,a.iaiПоставляя значения характеристичесjKHX чисед в формулу (4), найдем, чго В случае действительных аначенийг т.е., когда (.)еи )-(а-11)Еи()л+cen(dit|b).)3f)/2T|, ы а в случае комплексных значений, т. е., когда с ot A iov-g -) где VYI ot -f , 2 аргумент комплекс ного числа. Из формулы (3) также следует, что t П- IAQ. О) га i-t/i ai : Реализуя с оотн селения (5) - (7 ) .устройство вычисляет парамет1мл АиВ объекта. На фиг. 1 приведена функциональная блор-схема идеитификатс за параметров двумерного объекта, на фиг. 2 - функ циональная блок-схема блока вычисления параметров непрерывной модели, . В блок-схему идентификатора параметг ров двумерного обьека входят объект 1, первый амплитудно-импульсный модулятор 2,второй амплитудно-импульсный модулятор 3, дискретная модель 4,блок 5 вычисления векторного коэффициента усиления, первый блок 6 умножения, первый блок 7 сумматоров, первый блок 8 настройки, бпок 9 вычисления параметров непрерывной модели, второй блок 10 настройки, непреръшна51 модель 11, второй блок 12 сумматоров. Блок-схема блока вы шсления парамет ров непрерьганой модели содержит второй блок 13 умножения матриц, бпок 14 вычисления констант, логический блок 15, второй блок 16 умножения, первый функциональный преобразователь 17, второй функциональный преофазователь 18, третий блок 19 сумматоров, первый блок 20 умножения матриц. Идентификатор параметров двумерного объекта работает следующим образом. Входные и выходные сигналы объекта 1 преобразуются в дискретную форму амплитудно-импульсными модулятор 1ми 2 и 3 и, формируя вектор измерений V(-t) ч поступают на вход блока 5, где вычисляется векторный коэффициент усияенвя ЯШ в также на вход дискреггной модепи 4. В первом блоке 7 сумматоров вычислоисггся значения t)и fi2() , рые в первом блоке, 6 умножения умножаются на ). Результат поступает в первый блок 8 настройки, где вычисляются оценки параметров, вкодяпшх в. векторы Q-f и О5, т. е. определяются элементы -,,} , , -i , j 1,2 матриц и СЗ . Из бпока 8 эти значения носярупаюг в бпок 4 для настройки дискретной модели, а также в блок 9 вычисления параметров непрерывной модели, где определяются значения матриц А и В которые поступают в блок Ю, осуществляквдий настройку параметров непрерывной моде- лЬ 11. Подключение параллельно объекту 1 непрерывной модели 11 позволяет. путем вычитания во втором блоке 12 сумматоров ее выходов из выходов обьекта 1 осуществлять контроль за точностью идентификации. Блок 9 вычисления параметров непрерывной модели работает следующим образом. Из первого бпока 8 настройки в блок 14 вычисления констант поотупакяр пар метры j , -1, j 1,2 на основании которых определяются значения dL Ci - faaVS C-t, P lC-АЧ. VYi-dl-Saa, 5-И/(2cl-C--l),cl-|l, ,-f 4Логический блок 15 осуществляет сравнение по величине констант с и оС ., а также управление первым 17 н вторым 18 фунйшональными преофааоввтелями, вторым блоком 16 умножения н третьи блоком 19 сумматоров. В случае, копда Сс(. в первом функциональном преобразователе 17 вычисляется значение )/2:T , во втором функциональном преобразователе 18 вычисляется значение . t6viC). во вто ром блоке 16 умножения вычислшются произведения , ., i-z.f ретьем блоке 19 сумматоров вычисляются . значения .к,2(.й- Xc. также сюда поступают из блока 16 зввг4eHraq.,,, в результате чего матрица А оказывается сформирсваяной. В случае, когда CSci, во втором функциональном преобразователе 1.8 вы- числяются значения К, -CBvi W+|b)3/ IT, )3/2T,K.-K4, во-.втором блоке 16 умножения на основании посту пающих из блока 14 констант , di и j , ij 1,2, а во блока 18 значений К-, .Кд.КгК вычисляются aiiaченияК5 К4()/Р.Ке К5 -Э;/Э и значения -i(k, Р IJ в третьем блоке сумматоров 19 вычисляются значения 011-1- 1 Я|4 КТ + Р, сюда же из блока 16 поступают значения Q,f;i Р , (t .,. результате чего матрица А оказьюается сформированной. Кроме того, в обоих случая ;, во втором блоке 16 умножения ;эычисля1отся элементы б.,- :( ii .5 fi,d2..i,aa5( i-i матрицы р . Ё первом блоке 20 Умножения матриц вычисляется матрица Ь 1)А , которая затем перемножается с поступающей блока .8 матрицей G во втором блоке 13 умножения матриц, в результате определяется матрица Б ЬС|. Вычисленные соответственно в блоках 19 и 13 значения матриц А и В являются выходным параметрами рассматриваемого устройства, и, кроме того, поступая в блок 10, служат для настройки параметров непрерывной модели 11. Идентификатор является специализированным устройством автономного действия и по сравнению с известными иден тификаторами имеет преимущества в конструктивном (вес, габариты, количес во элементов), и, как следствие, - в экономическом отношении. Кроме того, предлагаемое устройство обеспечивает простоту настройки и лучшие эксплуатационные характеристики (меньшая пот ребляемая мощность, работоспособность в широком диапазоне режимов), что позволяет со1фатить сроки отработки и повысить надежность системы управления в целом. Формула изобретения 1. Идентификатор параметров двумер ного объекта, содержащий первый ампли тудно-импульсный модулятор и последов тельно соединенные второй амплитудноимпульсньШ модулятор блок вычисления векторного коэффициента передачи, первый блок умножения, первый блок настройки, дискретную модель и первый бл сумматоров, подключенный вторым юсодом к выходу второго амплитудно-и а1ул ного модулятора и ко второму входу б б8 дискретной модели, а вькодом - ко второму Входу первого блока умножения, первый амплитудно-импульсйэгй модулятор подключен выходом ко второму входу блока вычисления векторного коэффициента передачи и к третьему входу дискретной модели, а :вя:одом , - к входу объекта, выход которого подключен к входу второго амплитудно-импульсного модулятора, отличающийся тем, что, с целью расширения функциональных возможностей идентификатора, он содержит последовательно соединенные блок вычисления параметров непрерывной модели, второй блок настройки, непрерывную модель и второй блок сумматоров, соединенкь1й вторым входом с выходом объекта, вход которого подключен ко второму входу непрерывной модели, второй выход блока вычисления параметров непрерывной модели подключен ко второму входу второго блока настройки. 2. Идентификатор по п. 1, о т л и чающийся тем, что блок вычисления параметров непрерывной модели содержит первый функциональный преобразователь и последовательно соединеннъю блок вычисления констант, логический блок, второй функциональный преобразователь,второй блок умножения, третий блок сумматоров, первый блок умножения матриц и-второй блок умножения матриц, подключенный вторым входом к, выходу первого блока настройки и к входу блока вычисления койстант, второй выход которого подключен ко второму входу второго блока умножения, подключенного вторым выходом ко второму Входу перво -го блока умножения матриц, третьим входом - к выходу первого функционального преобразователя, четвертым входом ко второму выходу логического блока и ко второму входу третьего блока сумматоров, третий вход которого соединен со вторым выходом второго функционального преобразователя, а выход - со вторым входом второго блока настройки, подключенного входом к выходу второго блока умножения матриц, вход первого функционального преобразователя соединен с третьим выходом логического блока; Источники информации, приня-тые во внимание при экспертизе 1.Авторское свидетельство СССР № 744455, кл. GO5 В 17/О2, 198О. 2.Авторское свидетельство СССР № 798701, кл. G05 В 13/02, 1981 (прототип).
г/f,
Hf/ro y/ff I fff
M:
fffff OJrffff,
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система для идентификации объекта управления | 1980 |
|
SU875337A1 |
| Адаптивное устройство для идентификацииОб'ЕКТА упРАВлЕНия | 1978 |
|
SU798701A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2004 |
|
RU2258951C1 |
| Идентификатор параметров стохастического динамического объекта | 1984 |
|
SU1255991A1 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| Автомат-настройщик для систем управления | 1980 |
|
SU924669A1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| Перестраиваемый цифровой фильтр с программируемой структурой | 2016 |
|
RU2631976C2 |
zL
fj
фуг. Z
г
