Изобретение относится к автомати ческому управлению и регулированию и может быть использовано при постр ении систем управления, слежения и стабилизации различного назначения, в частности в автопилотах, в автору левых, в электромеханических устрой ствах и других системах с неполной . информацией о параметрах объекта. Известны самонастраивающиеся сис темы, содержание эталонную модель, умножители, cyNwaTop, блоки вычитания и интеграторы. Эти системы позволяют риаить задачи адаптации без предварительной идентификации текущих параметров объекта с помощью устройства адаптации и подключенных к нему регулятора координатного управления и регулятора парё1метрическогб управле- i ния. Устройство адаптации но ошибке рассогласования основного контура и эталонной модели формирует необходимые законы изменения коэффициентов или структуры регулйтора на основе методов градиента или прямого метода Ляпунова ± , к недостаткам таких систем относят трудность расчета функций чувствительности, используемых в метода градиента, взaи ffloe влияние процессо настройки в одном из каналов системы на переходные процессы в остгшьных каналах и сравнительно узкий диапазо начальных отклонений объекта управле ния, при которых самонастраивающаяся система сохраняет работоспособность и устойчивость. Все это снижает точность работы самокастраивсцощихся сис тем и сужает область их применения. I Наиболее близкой к предлагаемой является самонастраивающаяся система управления, содержащая последователь но соединенные первый блок умножителей, первый блок интеграторов, второй блок умножителей, первый сумматор, первый блок усилителей, объект управления, третий блок умножителей и второй блок интеграторов, выход которого соединен с вторым входом объекта управления, первый выход которого соединен с первым входом первого блока умножителей и nepBixiM и ,. вторым входами третьего блока умножителей, с третьим блоком усилителей и через второй блок усилителей с вторым входам первого сумматора, вто рой выход объекта управления соедине с входом четвертого блока усилителей и входом первого блока умножи телей Н . К недостаткам относится невысокая динамическая точность систе как следствие перестройки параметров объекта и в том случае, когда они совпадают с расчетными оптимальными значениями. Цель изое5ретения - повышение динамической точности системы путем исключения перестройки параметров объекта, если они совпадают с расчетными оптимальными значениями. Поставленная цель достигается тем, что самонастраивгцощаяся система управления дополнительно содержит последовательно соединенные второй сумматор и четвертый блок умножителей, вуход которого соединен с третьими входами первого и третьего блоков умножителей, второй вход которого, первЕлй и второй входы второго сумматора соединены соответственно с первым выходом объекта управления, выходом третьего и четвертого блоков усилителей. Блоками умножителей, интеграторов и усилителей являются параллельные соединения соответственно умножителей, инт-еграторов, усилителей со своими коэффициентами. , На чертеже представлена блок-схема самонастраивающейся системы управления . На чертеже обозначены объект 1 Ь правления, первый, второй, третий и четвертый блоки 2, 2, 2 и 2 усилителей, первый и сумматоры 3 и 3j, первый и второй блоки 4 и 4. интеграторов, первый, второй, третий и четвертый блоки 5, Sj, 5 умножителей, первая и вторая выходные координаты X и X объекта управления, выходные сигналы N, и второго сумматора 32 и первого блока 2 усилителей, выходной сигнал Н четвертого блока 5 умножителей, выходные сигналы Д.и , Л первого и -второго блоков 4 и 4 интеграторов. Работу самонастраивающейся системы управления можно описать с помоптью системы дифференциальных уравнений следующим образом. Объект управления rylt)(A(t)(t)x(t) + B(tlu(i) x( . гдex(t)eR,u(i),X5- вектор начальных значений состояния;A(t),B(t) - известные матрицы; alt)-.матрица неизвестных параметрических в6змув1ений.; X,(t)- матрица, элементы которой перестраивгиотся контуром самонастройки. Размерности о( (t) и oi (t) могут не совпадать. Функционал, который требуется минимизировать, управляя данным бъектом, определяется выражением т (T)Fx(T)+i(/(t)Q(i)x(t). u(t)Rlt)ult)dt, где Т - знак транспортирования; Т - конечное время работы си матрицы F ,Qltl,R(t заданы. Управление выбирается в виде uttb-RWJi(iH«W uk (il) X (U. Когда размерности a (t) и oi(t) совпад ют, &k(t,l берется равным 0. K{-t) определяется уравнением )-K(t)Alt))Kltli.k(t)BWS()Kltl-Q LKITI R . Эталонная система i(t) A(t)XM(tnB(t)ult) «MVtobXo Функция Гамильтона для систег-ы Ho iMWQWvMW4u4t)Rlt)ut x;itiKit)x«w -|x;itiKiiUMWДля исходной системы (1) строитс функция Н - выходной сигнал четвер го блока 5j| умножителей. i .) W T W ttluW+J n-t) K(tlK(t + ) (Mx(t)+x (ti y((i ic(t) x-(t)lG,WxUUXW xH)) xHi) -Nli), где (tl AdUkai B(il ) (i), (iUlt)U(tUlM Из (7) следует, что являетс необходимым и достаточным условием минимума функционала (2. Это обст тельство положено в основу констру ции алгоритмов настройки, с помощь KOTOEttJX будут парироваться парамет ческие возмущения а(t. При этом, используя прямой мето Ляпуноща для асимптотической сходи мости к оптимальному значению крит рия качества (2), можно получить, nepecTpoltKa параметров объекта или управления должна производиться в ответствии с уравнениями: «.(tV -H-KH)X(t)-x(t), осНоЬО ikltb-HX(i).x(i) L kliobO опредбляю1дами выходные значения оС Ak первого и второго блоков 4, 4 интеграторов, причём значения К1л) , ( it) ,R((t)K(t), необходимые для . работы алгорит лэв, определяются до начала работы системы на стадии Нроектирования. Самонастраивающаяся система управления работает следующим образом. ;;ля управления объектом выходные координаты объекта управления х и х через третий и четвертый 2у и f 2 усилителей подаются на второй сумматор 3, который по формуле (8) образует сигнёш N , который вместе с координатой X поступает на входы четвертого блока 54 умножителей для получения значений гамильтониана Н по формуле (7). Выход четвертого.блока 54 умножителей связан с третьими входами первого и третьего блоков 5f и 5з умножителей, на первые и вторые входы которых поступают соответствующие координаты объекта 1. Первьй и третий блоки умножителей формируют сигногал, поступающие затем на входы первого и второго блоков интеграторов, которые, определяют алгоритма настройки управляющего воздействия а или параметров объекта управления по формулам (10) и (9) соответственно. Выходной сигнал сС второго блока 42 интеграторов подключен к второму входу объекта управления. Выходной сгигнал ik первого блока 4 интеграторйв связан первый вход второго блока 52 умножителей с первым входом первого сумматора 3 , второй вход второго блока 52 умножителей соединен с соответствующим выходом X объекта 1 управления, который через второй блок 22 усилителей подключен к второму входу первого сумматора . На выходе первого сумматора 3 после прохождения через первый блок 2 усилителей формируется по формуле (3) управляющий сигнал U , поступающий на первый вход объекта 1. i , .Предлагаемая система позволяет повысить точность работы путем отключения систем настройки в случае первоначального нахождения объекта на оптимальной траектории движения, изза независимости процессов настройки парс«метров от амплитуды и входных воздействий посредством сохранения устойчивости адаптивной системы при конечных отклонениях параметров объекта от оптимальных значений параметров. Она может также найти применение.и в тех областях техники, где известные схемл самонастройки ранее не применялись. Сочетание двух контуров настройки (параметрического и координатного) позволяет более. оперативно и точно производить компенсацию возмущенных параметров.
51008698
Предлагаемая система даёт возможность системы на стгщнн проектирования и упростить наладку систем управления снизить эксплуатационные расхоиз-за определения ряда параметров ды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система для регулирования объектов с запаздыванием | 1977 |
|
SU634235A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система управления | 1978 |
|
SU746415A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 1998 |
|
RU2148269C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437136C2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно соединенные первый блок умножителей, первый блок интеграторов, второй блок умножителей, первый сумматор, первц блок усилителей, объект управления, третий блок умножителей и второй блок интеграторов, выход которого соединен с вторым уходом объекта управления, первый выход которого соединен с первым входом первого бло1са умножителей и первым и вторым входс1ми третьего. блока умножителей, С третьим блоком усилителей и через второй блок усилителей с вторым входом первого сумматора, второй выход объекта управления соединен с входом четвертого блока усилителей и вторым входом первого блока умножителей, отличающаяся тем, что, с целью повьояения быстродействия системл,. она содержит последовательто соединенные второй сумматор и четвертью блок умножителей, выход которого соединен с третьими входами (Л первого и третьего блоков умножителей, второй вход которого, первый и второй входы второго сумматора соединены соответственно с первым выходом объекта управления, выходом третьего 3 и четвертого блоков усилителей. 00 CF СО 30 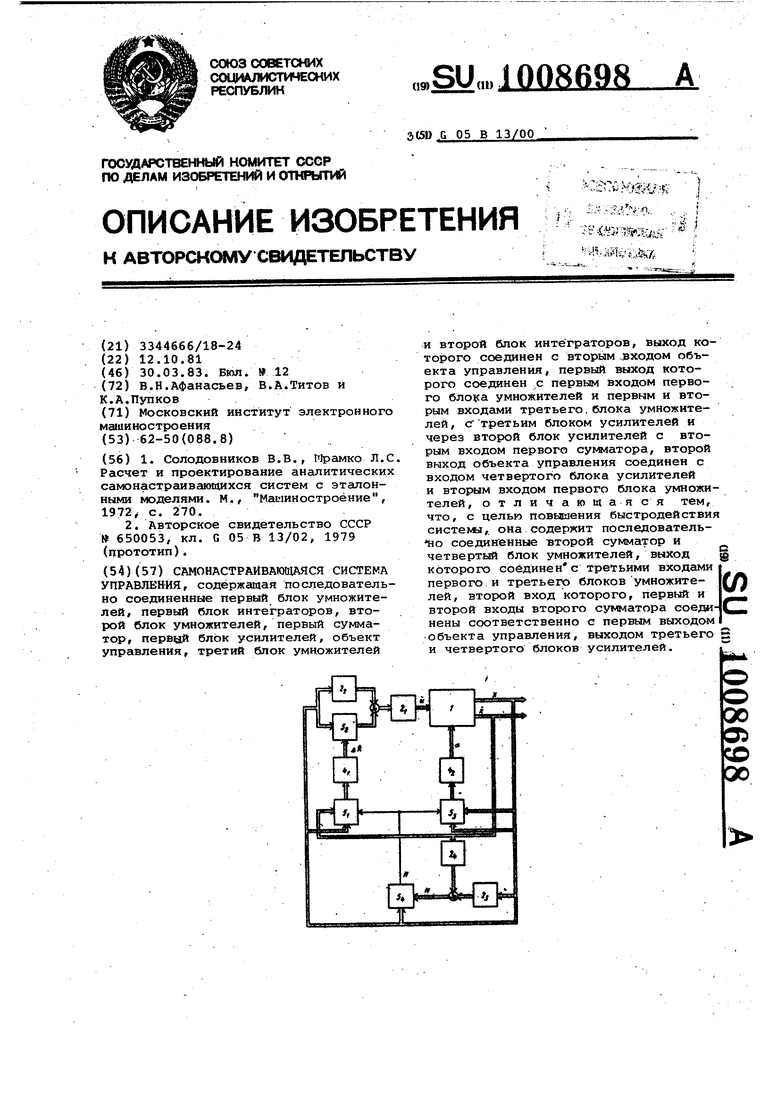
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Солодовников В.В., Р рамко Л.С | |||
| Расчет и проектирование аналитических самонастраиваняцихся систем с эталонными моделями | |||
| М., Машиностроение, 1972, с | |||
| Приспособление для уменьшения дымовой тяги паровоза | 1920 |
|
SU270A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Самонастраивающаяся система управления | 1977 |
|
SU650053A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
