Изобретение относится к самонастраивающимся устройствам автоматики и предназначено для идентификации параметров объекта в условиях его нормального функционирования при из менении уровня .входных сигналов в широких пределах.; .
Известен идентификатор коэффициентов передаточных функций, содержащий настраиваемую модель,.сумматор для формирования ошибки настройки g., три дифференцирующих блока, четыре блока умножения и три интегратора tl.
Недостатком известного идентификатора является то, что скорость подстройки существенно зависит отуровня входного сигнала Е. Если для целей идентификации в качестве входных используются не специальные сигналы с точно выдерживаемым уровнем, а произвольные. Уровень которых изменяется в десятки раз t,4To имеет место при идентификации, осуществляемой одновременно с нормальным функционированием объекта), быстродействие такого устройства при десятикратном снижении уровня Е может снизиться в сто раз, что делает его практически неработоспособным при низком уровне входного сигнала. При
больших уровнях сигнала Е может быть потеряна ..устойчивость . процесса подстройки.
Известно также устройство для определения параилетров динамических объактов, содержащее параметрически настраиваемые модели, две схемы форм -1рования ошибки настройки, блок контроля: качества настройки и
10 блок формирования сигналов настройки, причем два последних блока в свою очередь имеют сложную структуру, включакядую генератор тактовых импульсов, циклические переключатели, схему
15 контроля скорости изменения параметров, схему деления, схемы определения модуля, схему управления запоминанием, схему запоминания и другие элементы С2 .
20
Снижение зависимости быстродействия процессов идентификации от уровня входного сигнала, в этом устройстве обеспечивается путем значительного усложнения его схемы, что приводит к
25 снижению надежности устройства.
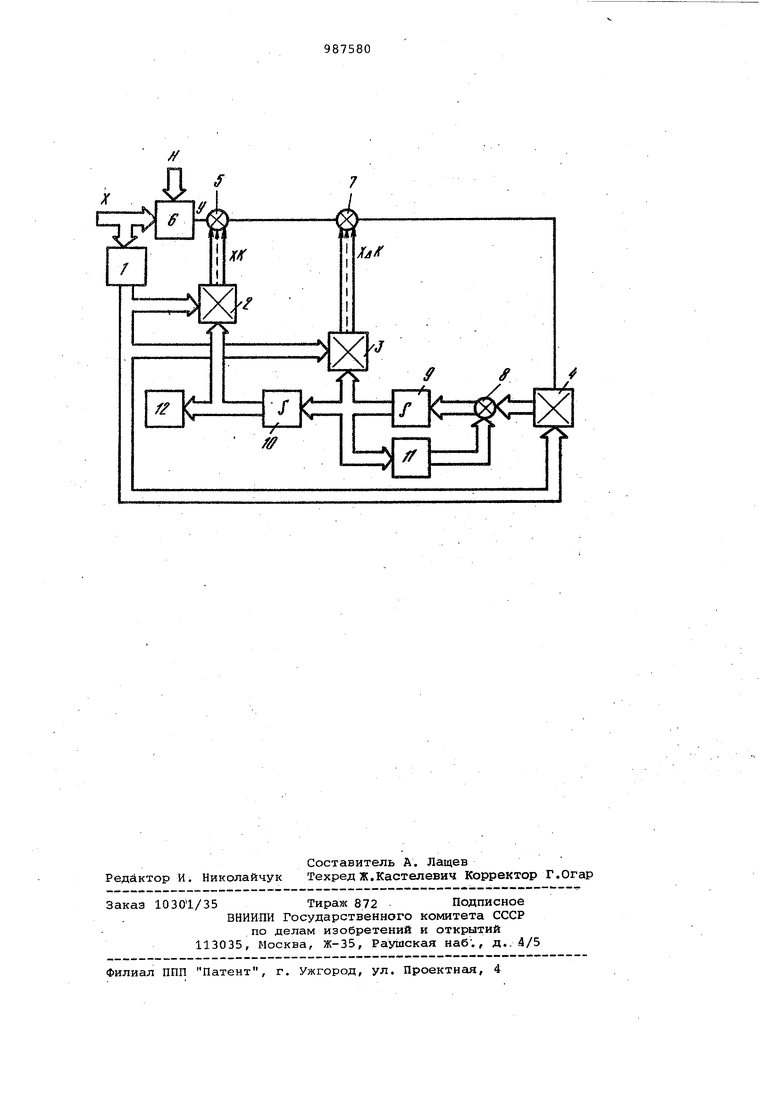
Наиболее близким к предлагаемому тёхничес{сим решением является устг ройство для определения характеристик объекта, содержащее последователь30но соединенные первый блок интеграторов, первый блок умножения и первый сумматор второй вход которого соединен с выходом объекта управления, соединенного своим входом через датчик входных Сигналов с первым входом {второго блока умножения и вторым вхо дом первого блока умножения, первый вход которого соединен с входом индикатора Сз 3. Недостатками известного устройства являются взаимовлияние процессов подстройки в различных каналах, недостаточная компенсация изменения уровней входных сигналов и необходимость технической реализации операции деления в широких пределах.изменения входных величин, что приводит либо к снижению точности работы устройства, либо к значительному усложнению его схемы. Целью изобретения является повышение быЪтродействия и точности работы устройства. Указанная цель достигается тем, что устройство содержит блок усилителей и последовательно соединенные блок сумматоров, второй блок интегра торов, третий блок умножения и второй сумматор, выход первого сумматора через последовательно соединенные второй сумматор и второй блок умножения соединен с первым входом сумматоров, выход второго блока интеграторов соединен с входом первого блока интеграторов и через блок усилителей с вторым входом блока сумматора, а выход датчика входных, сигналов соединен с вторым входом третьего блока умножения. На чертеже приведена функциональная схема устройства для идентификации параметров объекта. Устройство содержит датчик 1 вход ных сигналов, выход которого подключен к соответствующим входам первого, третьего и второго блоков умножения соответственно 2 - 4, последовательно соединенные первый сумматор 5, первый вход которого соединен с выходом объекта б, и второй сумматор 7, выход которого подключен к второму входу второго блока 4 умножения, выход которого через последовательно соединенные блок сумматоров 8 и второй блок интеграторов 9 подключен к второму входу третьего блока 3 умножения, к входу первого блока интеграторов 10 и входу блока усилителей 11, выход которого соединен с вторым входом блока сумматоров 8. Выход первого блока интеграторов 10 подключен к входу индикатора 12 и к второму входу первого блока 2 умножения, выход которого соединен с вторым входом первого сумматора 5, а выход третьего блока 3 умножения соединен с вторым входом второго сумматора .7 от До ще оп гд вяз мож илК ным где пре i.1 сле всл уст по доп век ким изм вьш где то .век не° лов lie ван По принципу действия, уйтройство ичается от известного наличием олнительного контура, позволяюо сформировать вторую невязку „, еде.ляемую соотношением 2 е -+ хдк х{н - к +лк}Д1) ,...,х - вектор входных величин, в .том числе и производные от входных и выходных переменных; Н h,...,h - вектор идентифицируемых коэффициентов ; ,. . .,kn - вектор оценок, получаемых на выходах интеграторов; . .. 4kj, - вектор вспомогательных оценок ; .g - первая невязка, представляющая собой разность сигналов с выхода исрледуемого объекта и с выхода цепи компенсации. В момент ПОЛНОЙ компенсации неки 6. и §„ .равны нулю, что возно только при ) НийК 0. Алгоритм подсогройки оценок kit) (Ъ) может.быть получен градиентметодом и имеет вид Мк -UgCM j . г,, I к -цлк, 1,, 1,2/ Ц 4 матрицы постоянных коэффициентов размерности пхп. Из первого уравнения системы 42 ), образованного с учетом выражения к виду дкч-UgC x x+tj)дк ЦгЦХ х(к-н;, дует, что процесс подстройки лК едствие наличия матрицы ойчив при любых значениях X и окончании переходного процесса в олнительном контуре (при ) тор и К определяется по формуле дк ( 1,зГЦхх(к-нь (3) Если матш1цы tj и L, выбраны таобразом, что во всем диапазоне енения уровня входного сигнала X олняются соотношения ICijI Я Aaij. .. Cjy - элементы матриодл С ЦХ X , элементы матрицы tj/ в соответствии с формулой (3) тор вспомогательных оценок лкхк - н зависит от уровня входных сигнаX, а его элементы - hj зависят от величин рассогласоий в других каналах.
Условно процесс идентификации по алгоритму (,2 } осуществляется в два этапа. На первом этапе происхо.дит подстройка оценок ЛК в дополнительном контуре, обладающем значительно болысим, чем в основном контуре , быстродействием(последнее может быть обеспечено соответствующим выбором матриц U и По завершении переходных процессов в дополнительном контуре скорость подстройки вектора оценок К с учетом зависимости С4 определяется вторым (уравнением сисхемы Л2)
к);
прИ21ем, если матрица U выбрана диагональной, устройство обеспечивает как независимость скорости подстройки оценок от уровня входных сигнало в заданном диапазоне их изменения, так и отсутствие взаимовлияния процессов подстройки в различных каналах, тогда как скорость подстройки вектора оценок в известном ус;гройст. ве
if -1 XX (н - к)
к -Ч .ххт
не позволяет обеспечить указанные выше требования.
Цифровое моделирование процессов подстройки оценок показывает, что при десятикратном снижении уровня входного сигнала X.йремя оценивания изменяется с 7,11 до 8,9 с практически при отсутствии взаимовлияния между каналами. Таким образом, введение дополнительного контура подстройки вспомогательных оценок позволяет обеспечить практически постоянное быстродействие процес- сов идентификации и независимость пр оцессов подстройки в различных каналах,ЧТО приводит к повышению точности работы устройства при одновременном исключении квадраторов
и такого Технически труднореализуемого элемента, как делитель.
Формула изобретения
, Устройство для идентификации параметров объекта, содержащее последовательно соединенные первый блок интеграторов, первый блок умножения
и первый сумматор, второй вход которого соединен с выходом объекта управления, соединенного своим, входом через датчик входных сигналов: с первым входом второго блока умножения и вторым входом первого блока умножения, первый вход которого соединен с входом индикатора, отличающееся тем, что, с целью повьоления быстродействия устройства,
оио содержит блок усилителей и последовательно соединённые блок сумматоров, второй блок интеграторов, третий блок умножения и второй сумматор, выход первого сумматора через
последовательно соединенные второй сумматор и второй блок умножения соединен с первым входом блока сумматора, выход второго блока интеграторов соединен с входом первого блока
интеграторов и через блок ;усилителей с вторым входом блока суАматоровгА выход датчика входных сигналов соединен с вторым входом третьего блока умножения.
Источники информации,
принятые во внимание при экспертиза
1.Патент Франции W 2 061 543, кл. G Об G 7/00, 1969.
2..Авторское свидетельство СССР 473992, кл. G 05 В 23/02, 1974.
3.Райбман Н.С., Чадеев В.М. Адаптивные .модели в системеис управления. М., Советское радио, 1966, .о. 135 / прототип ).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1339499A2 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1295371A1 |
| Устройство для идентификации линейного объекта | 1981 |
|
SU1012209A1 |
| Устройство для идентификации | 1982 |
|
SU1038924A1 |
| Адаптивный вычислитель частотных характеристик систем автоматического управления | 1980 |
|
SU1072004A1 |
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |
| Адаптивное устройство для идентификацииОб'ЕКТА упРАВлЕНия | 1978 |
|
SU798701A1 |
| Устройство для индентификации линейного объекта | 1978 |
|
SU744455A1 |