11
Изобретение относится к вычислительной технике и может быть использовано в специализированных вычислителях, преобразующих полярные координаты в прямоугольные.
Цель изобретения - повышение быст родействия.
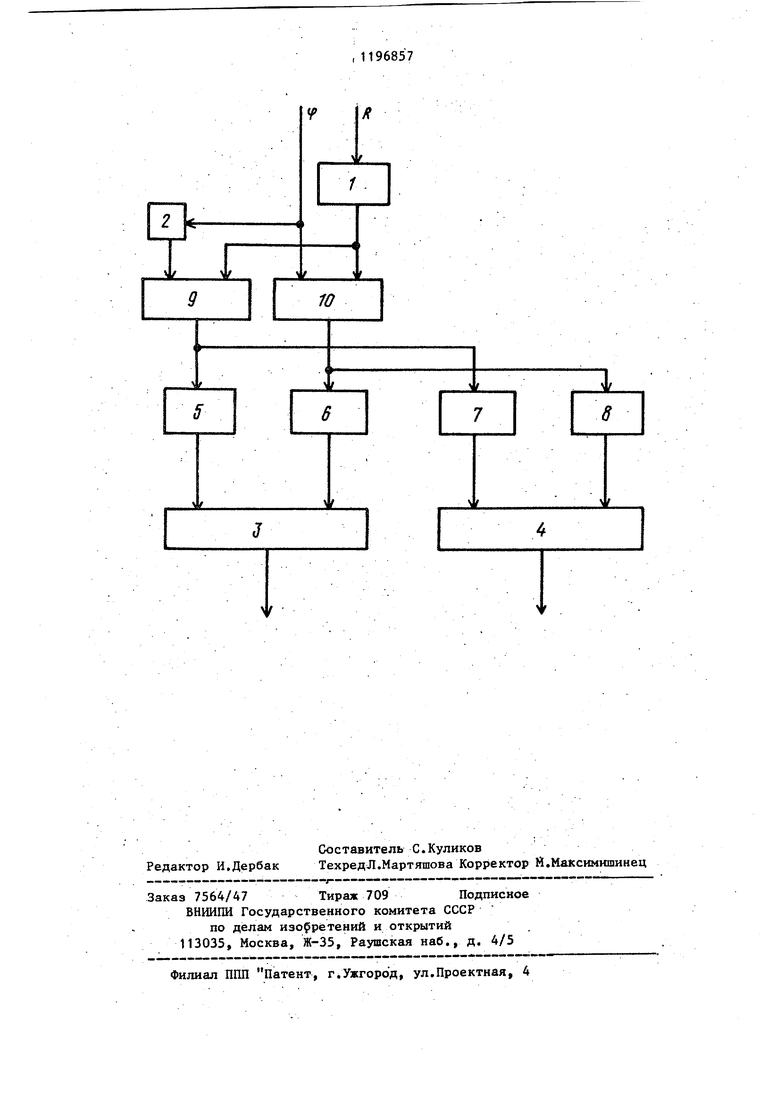
На чертеже приведена структурная схема устройства для преобразования координат вектора.
Устройство содержит арксинусный преобразователь 1, группу элементов НЕ 2, первые 3 и 4 сумматоры, первый 5 и второй Лосинусные преоЬразователи, первый; 7 и второй 8 .синусные преобразователи, третий 9 и четвертый 10 сумм-аторы. Причем преобразователи 1 и 5 - выполнены на блоках постоянной памяти.
В предлагаемом устройстве использован алгоритм вычисления произведений R -sin и R cosif, основанный на представлении модуля вектора R
в виде
, R А - sin ot ,
I где А - число, равное (n- разрядность целой части значений модуля вектора),
JR
oi arc sin
(1)
A и выражении произведения тригонометрических функций через их сумму или разность, т.е. RsinV A sinot sin ; (2) R cos 4 A sinoi . cos 4 R sinV -|- cosU-4)-cos(oi + «f) ; (4) Rcos4 --tsinW+4)+sinW-if)l(5;
96857 . 2
Устройство работает следующим образом.
Код модуля вектора подается на вход преобразователя 1, который преобразует его в код угла а/ согласно выражению (1). Угол V подается через вход устройства на вход сумматора 4 и через элемент НЕ 2 на вход сумма- . тора 3. На другие входь сумматоров 3 и 4 поступает код угла oi с выхода преобразователя 1,
Сумматор 3 вычисляет разность углов (), которая подается на входы преобразователей 5 и 7 .и кодируется 1ми в значении cosW- ) и sin(oi-V) соответственно. Сумматор 4 вычисляет сумму углов (йб+Ч), поступающую затем на входы преобразователей 6 и 8 и преобразуемую ими в коды 0 cos(oiL-t-0 и ).
Значение cos(fi-) с выхода преобразователя 5 подается на вход сумматора 9, на второй вход которого поступает значение с(й/+Ю с выхода преобразователя 6. На выходе сумма- ..тора 3 формируется разность косинусов углов, которая и пересылается по выходу ординаты вектора устрой-, ства. Сумматор 4 вычисляет сумму синусов углов sin(oi-y)+ sinW+) и пере-, сылает результат по выходу абциссы i вектора устройства. Таким образом, на выходах устройства формируются значения cos(ei.-4)-cos(ot + f)R sin Ч 2 ; 8inW-if)+sin(i/-b4)R cos 42 Множитель 2 определяет положение запятой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования качки | 1986 |
|
SU1334168A1 |
| Обратимый преобразователь координат | 1975 |
|
SU590765A1 |
| Устройство для преобразования прямоугольных координат в полярные | 1978 |
|
SU729597A1 |
| Функциональный преобразователь угла поворота вала в код | 1982 |
|
SU1080174A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Рулевое устройство транспортного средства со всеми управляемыми колесами | 1978 |
|
SU766942A1 |
| Цифровое устройство для вычисления синусно-косинусных функций | 1980 |
|
SU926651A1 |
| Преобразователь кода в угол поворота вала | 1984 |
|
SU1236613A1 |
| Синусно-косинусный функциональный преобразователь | 1981 |
|
SU970357A1 |
| Устройство для отображения векторных диаграмм на экране ЭЛТ | 1983 |
|
SU1109786A1 |
УСТРОЙСТВОДЛЯ ПРЕОБРАЗОВАНИЯ КООРДИНАТ ВЕКТОРА, содержащее- . два сумматора, первые синусньш и/ косинусный преобра.зователи, группу элементов НЕ, причем выходы первого и второго сумматоров являются выхо-. дами абциссы и ординаты вектора устройства соответственно, о т л и чающее ся тем, что, с целью повышения быстродействия, оно дополкксоюзиля «гг««- |3| 13 TSiX:; -: бЙБЛиОТГ А нительно содержит, вторые синусньш и косинусный преобразователи, арксинусный преобразователь и два сумматора, причем- вход модуля вектора устройства соединен с входом арксинусного преобразователя, выхрд -которого соединен с. первым входом третьего сумматора, второй вход которого через группу элементов НЕ соединен с входом кода угла поворота устройства и первым входом четвертого сумматора, второй вход которого соединен с выходом арксинусного преобразовател5я., а выход третьего сумматора .соединен с входами первых косинусного и синусного преобразователей, выходы которыхсоединены с первьгми (Л входами первого и второго сумматоров с соответственно, вторые входы которых соединены с выходами вторых косинусного и синусного преобразователей ;соответственно,. входы которых соединены с выходом четвертого сумматора. ф 0д 00 сд -ч1
| Цифровой преобразователь координат | 1980 |
|
SU871162A1 |
| Цифровой преобразователь координат | 1980 |
|
SU943715A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
