вод которого осуществляется от рейки 7, на конце которой нарезан байонет ный паз б, взаимодействующий с пальцем 14, закрепленным на втулке 15, являющейся направляющей для рейки 7. На втулке 15 жестко закреплен рычаг 16 со сквозным пазом, в котором установлена ось рычага, жестко связанного с подвижным щитком. Перемещение датчика 1 в позицию измерения происходит поворотом кронштейна 3, осущестИзобретение относится к станкостроению, а именно к системам активного контроля, применяемым в станках с ЧПУ-,в частности токарных.
Целью изобретения является расширение технологических возможностей устройства за счет возможности установки датчика параллельно оси станка
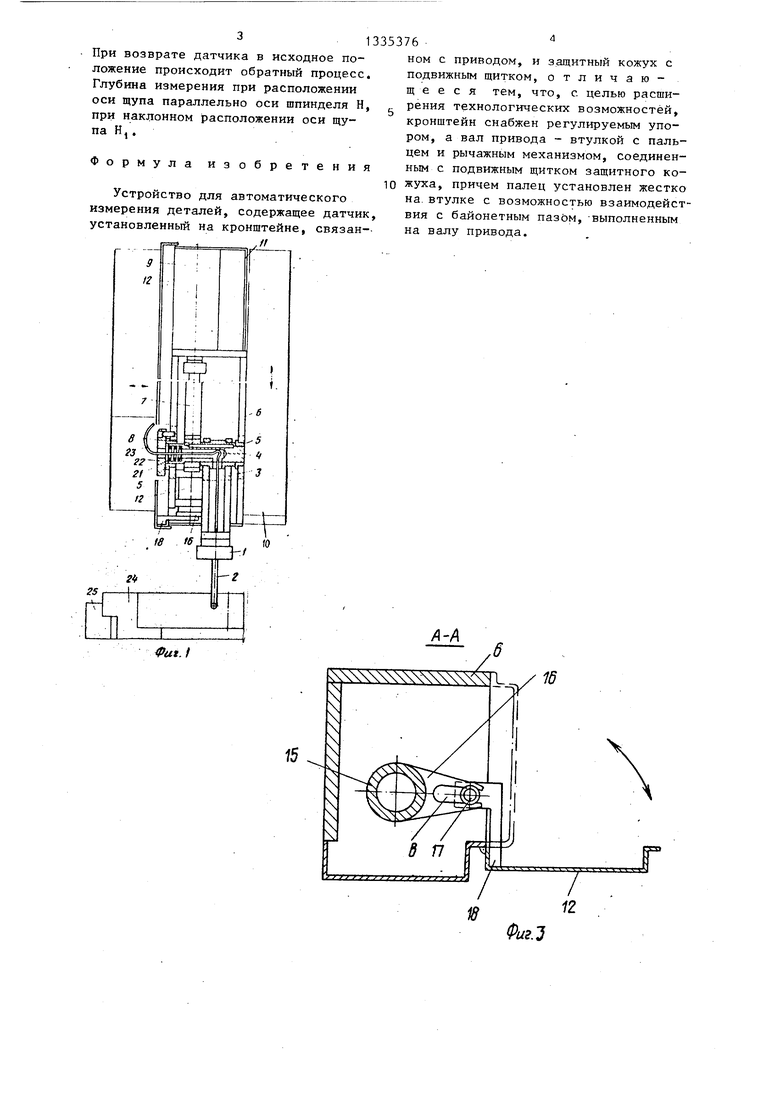
На фиг. 1 изображено предлагаемое устройство, вид спереди; на фиг. 2 - |то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 2.
Устройство состоит из датчика 1 со щупом 2, закрепленного на кронщ- тейне 3, жестко связанном с валом 4 который на подшипниках 5 скольжения установлен в корпусе 6. Вал 4 через реечную передачу, состоящую из рейки 7 и реечного колеса 8, связан с гидравлическим цилиндром 9, который снабжен устройством для торможения в конце прямого и обратного ходов (не показано). Устройство закреплено на боковой стороне вертикального ползуна 10 крестового суппорта и закрыто зaщиtным кожухом 11 с подвижным щитком 12..
На зеркале вертикального ползуна 10 крепится револьверная головка 13.
На конце рейки, противоположном силовому цилиндру 9, выполнен байо- нетный паз б, в котором установлен палец 14, закреплённый на втулке 15, являющейся направляющей для рейки 7. На втулке 15 жестко закреплен рычаг 16 со сквозным пазом b , в котором установлена ось 17 рычага -18, жестко связанного с подвижным щитком 12. На кронштейне 3 установлен регулируемый упор 19,а в корпусе 6 выполнено
вляемым от цилиндра через реечную передачу и связанный с ней вал 4. Одновременно при перемещении рейки 7 зА счет воздействия винтового участка байонетного паза б на палец 14 ocyiie- ствляется поворот втулки 15 и через ; рычаги 16 и 18 поворот щитка, что обеспечивает возможность прохода датчика 1 в позицию измерения. В позиции измерения ось щупа 2 параллельна оси шпинделя. 3 ил.
5
0
5
0
5
0
ребро 2U таким образом, чтобы угол между ним и регулируемым упором в позиции измерения составлял 90°. В
вале 4 выполнено отверстие, в котором установлена пружина 21, поджатая с помощью 22. Через отверстие проходит провод 23, соединяющий датчик 1 с электронным блоком, связаннык с системой ЧПУ (не показан). Деталь 24 зажата в патроне 25.
Устройство работает следующим образом.
При перемещении рейки 7 вверх за счет поворота вала 4, связанного с реечным колесом 8, происходит опускание кронштейна 3 с датчиком 1. Одновременно происходит перемещение пальца 14 по винтовому участку байонетного паза б, осуществляя поворот втулки 15 с рычагом 16, воздействующим своим пазом Ь на ось 17 рычага 18, заставляя его поворачиваться, производя тем самым поворот щитка 12 по стрелке (фиг. 3) и обеспечивая возможность свободного прохода датчика 1 в позицию измерения. В конце перемещения датчика в позицию измерения регулируемый упор 19 упирается в ребро 20, обеспечивая тем самым выборку зазоров и постоянство положения дат- . чика 1 в вертикальной плоскости относительно корпуса 6 при каждом измерительном цикле. Для обеспечения постоянства положения датчика 1 в го- ризонталонойплоскости служит пружина. 21, которая выбирает все зазоры между деталями, сидящими на -валу 4, и прижимает со значительным усилием кронштейн 3 с датчиком 1 к корпусу 6,
При возврате датчика в исходное положение происходит обратный процесс. Глубина измерения при расположении оси щупа параллельно оси шпинделя Н, при наклонном расположении оси щупа Н ,.
Формула изобретения
Устройство для автоматического измерения деталей, содержащее датчик, установленный на кронштейне, связан-,fl
ном с приводом, и защитный кожух с подвижным щитком, отличающееся тем, что, с целью расширения технологических возможностей, кронштейн снабжен регулируемым упором, а вал привода - втулкой с пальцем и рычажным механизмом, соединенным с подвижным щитком защитного кожуха, причем палец установлен жестко на. втулке с возможностью взаимодействия с байонетным пазом,-выполненным на валу привода.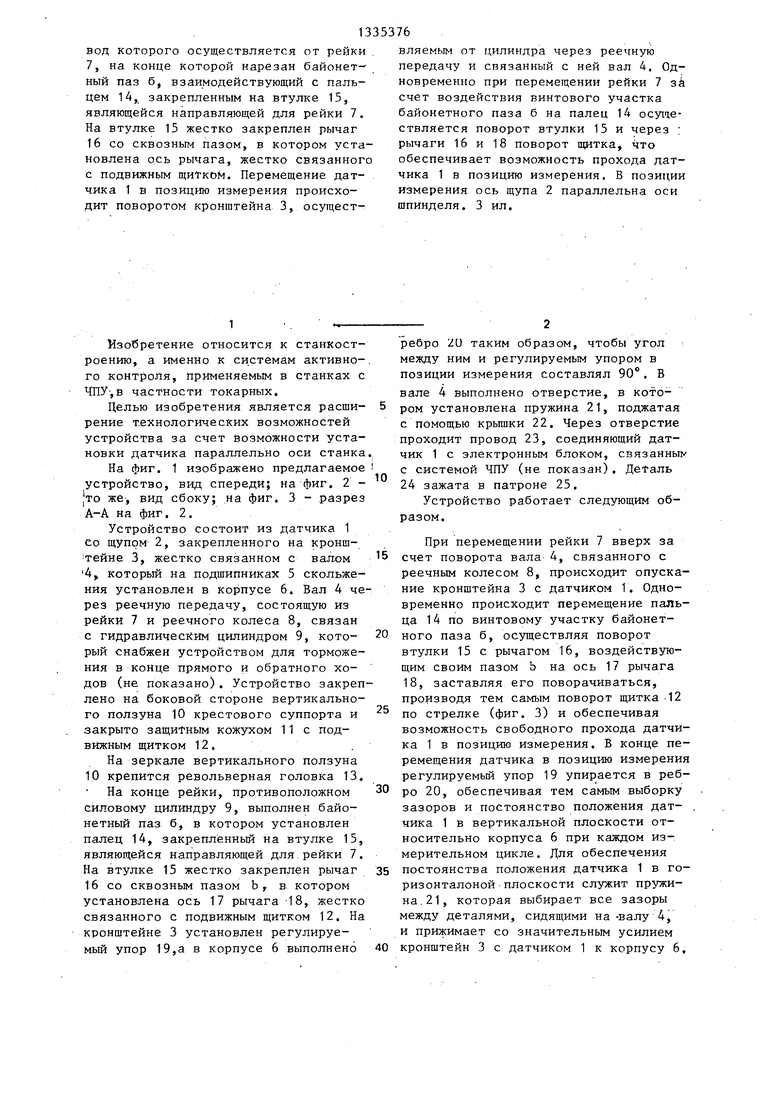
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Устройство для установки измерительной головки активного контроля | 1985 |
|
SU1303386A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| РЕГУЛЯТОР ЛИНЕЙНОЙ ПЛОТНОСТИ ЛЕНТЫ НА ТЕКСТИЛЬНОЙ МАШИНЕ | 2011 |
|
RU2471899C1 |
| Устройство для перемещения деталей с рабочей позиции пресса | 1984 |
|
SU1274825A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| Загрузочное устройство | 1985 |
|
SU1328146A1 |
| Станок с ЧПУ для заточки инъекционных игл одноразовых шприцов | 1990 |
|
SU1774911A3 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Автомат для отгибки зацепов пружин растяжения | 1989 |
|
SU1641491A1 |
Изобретение относится к области станкостроения, а именно к системам активного контроля, применяемым в станках с ЧПУ, в частности токарных. Целью изобретения является часшире- ние технологических возможностей устройства за счет возможности установки датчика параллельно оси станка. Датчик 1 со щупом 2 установлен на кронштейне 3,жестко закрепленном на валу 4, который через реечную передачу связан с приводом. Корпус 6 устройства установлен на вертикальном ползуне 10 крестового суппорта и закрыт кожухом с подвршным щитком, при(Л оо оо ел со 1 О5 Фиг
А /
,6
15
Фиг. З
| Вертикальные токарные станки с ЧПУ | |||
| Проспект фирмы Питлер, 1984. |
