Изобретение относится к холодной обработке металлов давлением, в частности к оборудованию для изготовления пружмн растяжения с двумя зацепами.
Цель изобретения - упрощение конструкции автомата за счет упрощения его кинематической схемы и повышение его надежности.
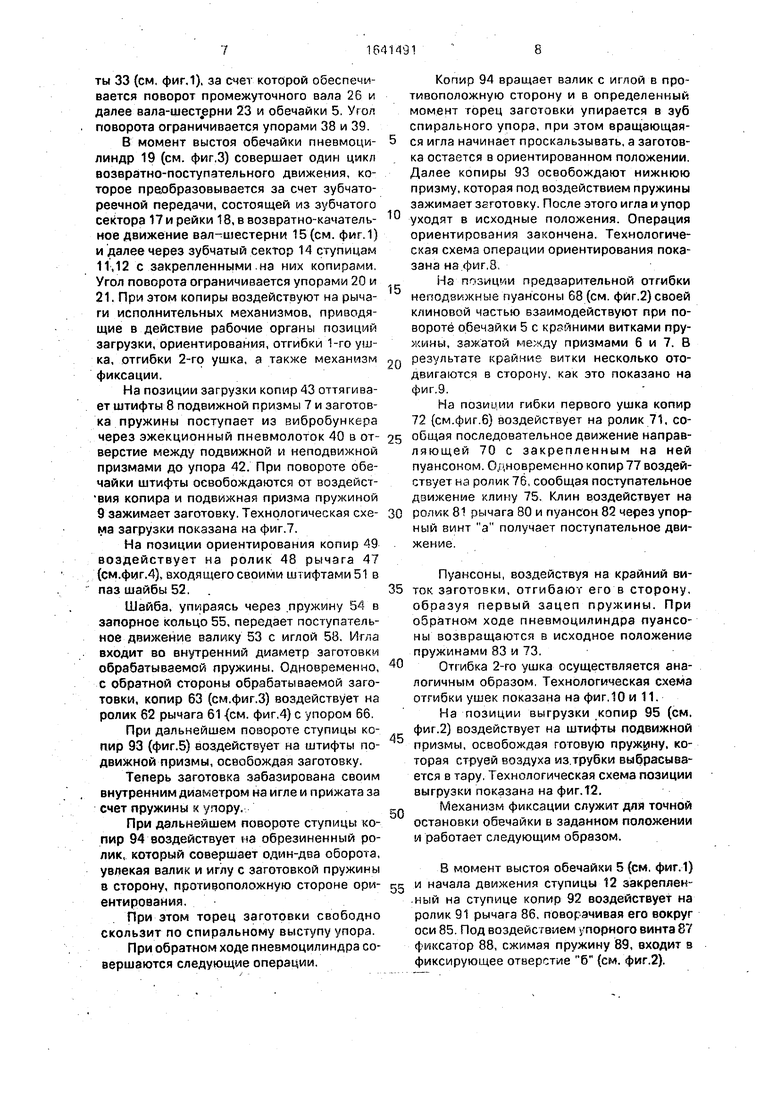
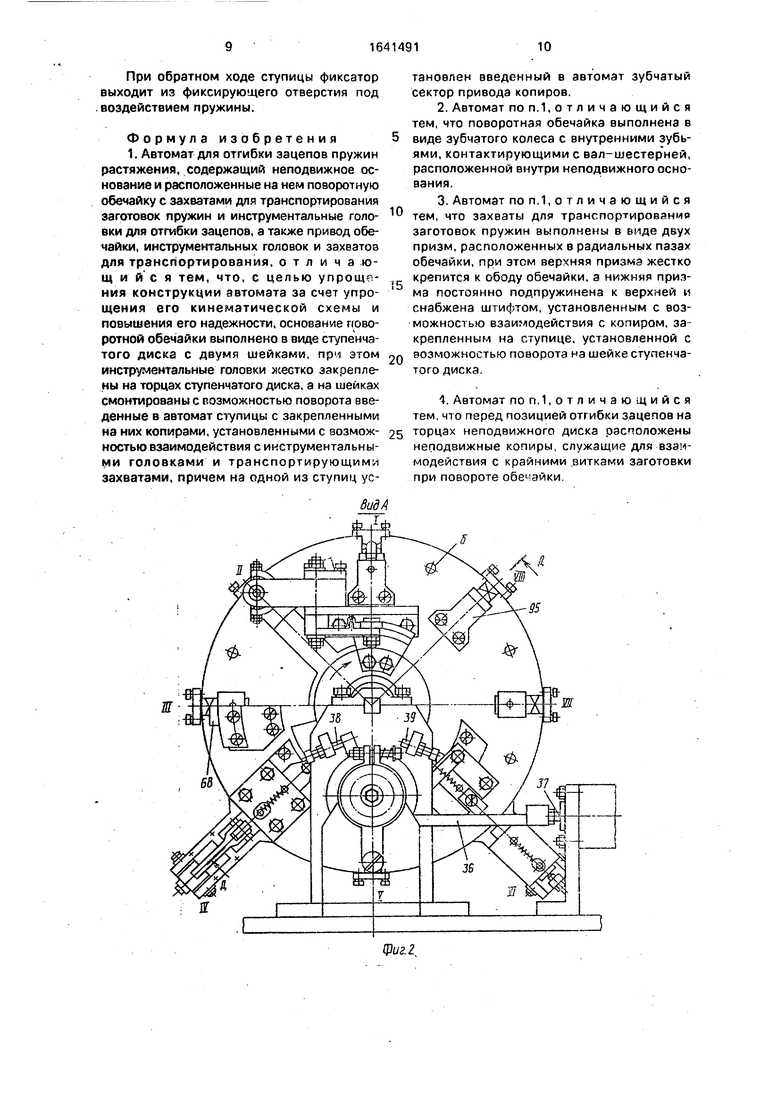
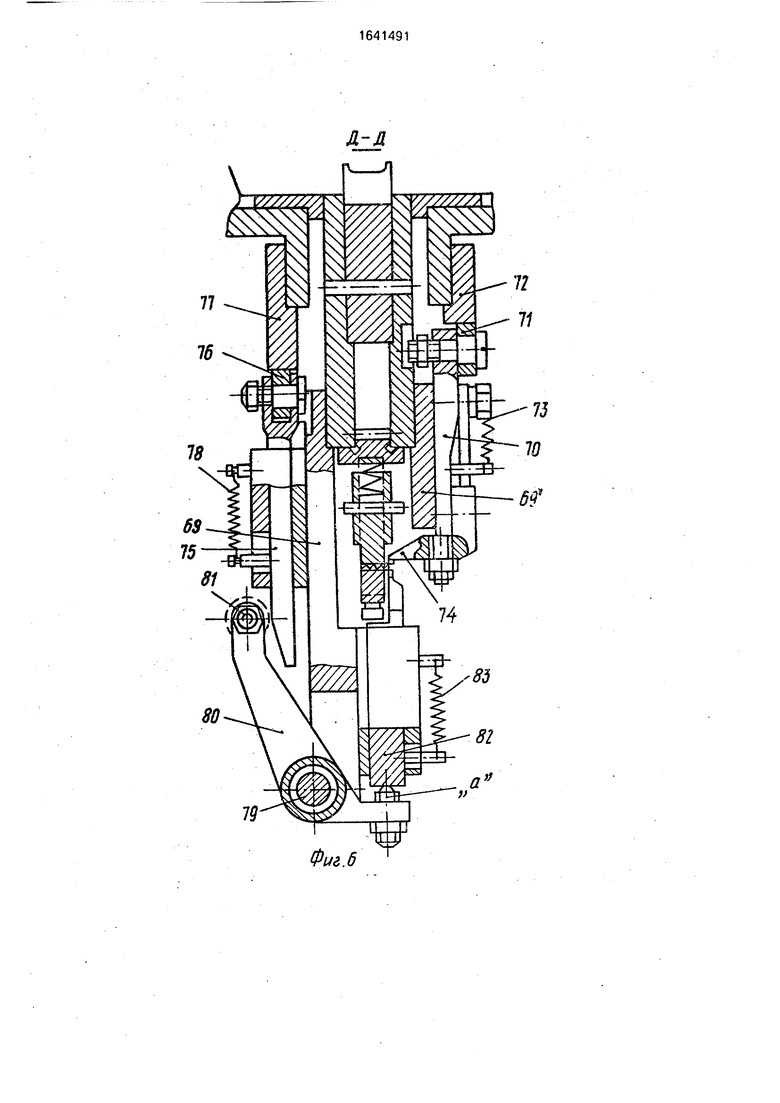
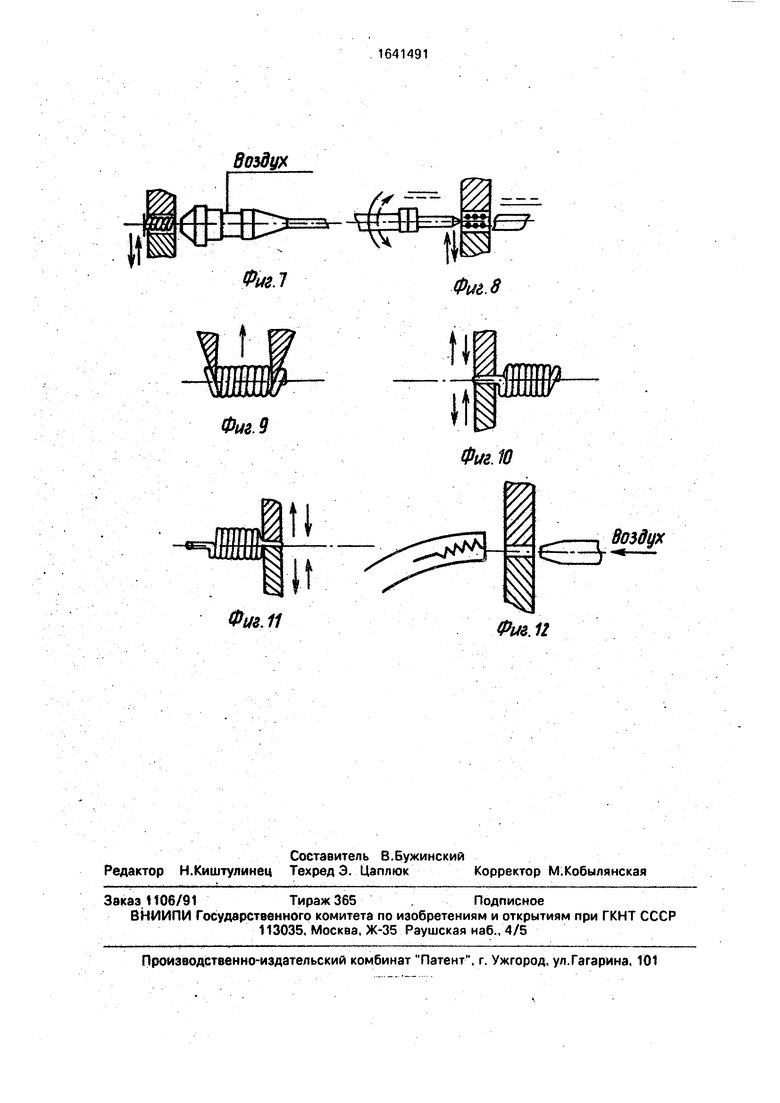
На фиг.1 изображен автомат, общий вид; нафиг.2-вид А на фиг.1; на фиг.З- вид Б на фиг.1; на фиг.4 - вид В на фиг.1; на фиг.5 - сечение Г - Г на фиг.4; на фиг.б - сечение Д- Д на фиг.2; на фиг.7 - 12 - технологические схемы.
Автомат для отгибки зацепов пружин растяжения выполнен по карусельной схеме с горизонтальной осью и состоит из сга- нины 1 (фиг,1), на которой располагается основание 2, жестко закрепленное в кронштейнах 3. Основание выполнено в виде ступенчатого диска с двумя шейками. На наружной поверхности диска крепится с возможностью поворота обечайка 5, выполнен нал в виде зубчатого колеса с.внутренним зацеплением.
На периферийной части обечайки имеются пазы, в которых жестко закреплены неподвижные призмы б и подвижные призмы 7 с запрессованными штифтами 8. Подвижные призмы поджимаются к неподвижным при помощи пружины 9.
На торцовых поверхностях диска могут быть расположены различные исполнительные механизмы рабочих позиций. В частности, в данном автомате (фиг.2) предусматриваются: поз.1 - загрузка заготовок пружин, поз.II - ориентирование заготовок пружин, поз.111 - предварительная отгибка крайних витков, поз.1У - отгибка 1-го зацепа, поз.У/ - свободная, nos.VI- отгибка 2-го зацепа, nos.VIl - свободная, nos.VIH - выгрузка.
-
15
20
25
30
35
40
45
50
Между позициями VIII и I располагается механизм 10 фиксации диска (см. фиг,1).
На шейках диска располагаются с возможностью поворота ступицы 11 и 12, жестко связанные между собой при помощи поводка 13, проходящего через прорезь в диске. К ступицам могут крепиться различные копиры (кулачки), взаимодействующие с исполнительными механизмами рабочих позиций.
К одной из ступиц жестко крепится зубчатый сектор 14, входящий в зацепление с вал-шестерней 15, расположенной с возможностью поворота в подшипниках 16. На противоположном конце вал-шестерни жестко крепи гея зубчатый сектор 17 (фиг.З), входящий в зацепление с зубчатой рейкой 18, жестко связанной со штоком пневмоцилин- дра 19.
Зубчатый сектор на своей противоположной стороне выполнен в виде поводка, контактирующего с упорным винтом 20 или 21.
Крайние положения рейки регистрируются конечными датчиками (не показаны).
Во внутренней полости диска в подшипниках 22 (см. фиг.1) располагается вал-шестерня 23, входящая в зацепление с зубьями обечайки. Противоположный конец вал-шестерни через соединительную муфту 24 и шпонки 25 соединен с промежуточным валом 26, расположенным в подшипниках 27 и 28. На противоположном конце вала на шпонке 29 консольно крепится гайкой 30 тормозной барабан 31, находящийся под постоянным воздействием тормозных колодок 32.
Между двумя опорами промежуточного вала собрана обгонная муфта 33, несущая на наружной обойме зубчатый сектор 34 с поводком 35. Зубчатый сектор аходит в зацепление с рейкой 36 (см. фиг.2), жестко связанной со штоком пнеамоцилиндра 37, а
поводок контактирует с упорным винтом 38 или 39.
Для питания автомата заготовками пружин на станине устанавливается вибробункер (не показан) с эжекционным пкевмолотком 40 (см. фиг, 1).
Для выгрузки готовых пружин на соответствующую позицию подводится трубка со струей сжатого воздуха (не показана).
Для управления циклами работы пнев
моцилиндров внутри станины располагает- ся блок управления (не показан), получающий команды от датчиков конечных положений пневмоцилиндрое.
Позиция загрузки заготовок (см.фиг. 1) содержит закрепленный на правой стороне диска эжекционный пневмолоток 40. связанный через трубку 41 с вибробункером (не показан). С левой стороны диска крепится упор 42, а по обе сюроны от диска к его торцу крепятся два путевых копира 43, контактирующих со штифтами 8 подвижной призмы 7.
Позиция ориентации заготовок пружин (фиг.4) содержит два кронштейна 44 и 45, закрепленных с правой и левой сторон торца диска.
8 левом кронштейне жестко крепится ось 46, на которой располагается с возмож- костью поворота рычаг 47, один конец которого контактирует через ролик 48 (см. фиг. 1) с копиром 49, при этом ролик постоянно прижат к копиру пружиной 50.
Противоположный конец рычага имеет вильчатую конструкцию с запрессованными штифтами 61 (см. фиг.4), входящими в паз шайбы 52, свободно посаженной на валике 53 и поджатой пружиной 54 через запорные шайбы 55.
валик свободно посажен во втулках 56. На переднем конце валика по наружному диаметру плотно посажено резиновое кольцо 57. На торце переднего кольца запрессована игла 58, дополнительно закрепленная винтом 59.
В правом кронштейне жестко крепится ось 60, на которой располагается с возможностью поворота рычаг 61, один конец которого контактирует через ролик 62 (см. фиг.З) С копиром 63. При этом ролик постоянно Прижат к копиру пружиной 64. На противоположном конце рычага имеется отверстие, в котором винтом 65 крепится упор 66, имеющий на Своем торце спиральный выступ
67.Позиция предварительной отгибки (см. фиг.2) содержит два неподвижных пуансона
68,закрепленных на правом и левом торцах диска и взаимодействующих с крайними
0
5
{
и
0
5
0
5 0
5
витками заготовки пружины при повороте обечайки.
Позиция отгибки первого зацепа (фиг.6) содержит левый 69 и правый 69 кронштейны, закрепленные на торцах диска.
В правом кронштейне расположен с возможностью поступательного движения ползун 70, имеющий на одном конце ролик 71, постоянно поджатый к копиру 72 пружиной 73. На другом конце ползуна жестко крепится пуансон 74.
В левом кронштейне расположен с возможностью поступательного движения клин 75 с роликом 76, постоянно поджатый к копиру 77 пружиной 78.
В верхней част;, кронштейна имеется проушина с запрессованной а ней осью 79, на которой посажен с возможностью кача- тельного движения рычаг 80.
Один конец рычага посредством ролика 81 контактирует с клином, а второй .конец рычага через регулировочный винт а контактирует с пуансоном 82, постоянно поджатым к регулировочному вкнту пружиной 83.
Позиция отгибки второго зацепа имеет конструкцию, аналогичную позиции отгибки пер.вого зацепз с той разницей, что левый и правый кронштейна меняются местами, Л
Позиция быгрузкм кмзет конструкцию, аналогичную позиции загрузки, с той разницей, что вместо эжекциоино о пневмолотка на торце диска располагается трубка для подвода сжатого воздуха.
Механизм фиксации располагается в кронштейне 84 (см. фиг.1), жестко прикрепленном к правому торцу диска.
В нижней части кронштейна имеется проушина с запрессованной осью 85. На оси свободно посажен рычаг 86, в верхней части которого установлен с возможностью регулировки упорный винт 87, воздействующий на фиксатор 88 и пружину 89. Фиксатор располагается в верхней части кронштейна и свободно посажен во втулках 90. На нижней части рычага установлен ролик 91, постоянно контактирующий с копиром 92. Позициями 93,94 и 95 обозначены остальные копиры автомата.
Автомат работает следующим образом,
Пневмоцилиндр 37 (см. фиг.2) совершает возвратно-поступательное движение под воздействием блока управления и команд датчиков конечных положений. При этом зубчато-реечная передача, состоящая из зубчатого сектора 34 (см. фиг 1) и рейки 36 (см. фиг 2), сообщает возвратно-качатеяьное движение наружной обойме обгонной муфты 33 (см. фиг.1), за смет которой обеспечивается поворот промежуточного вала 26 и далее вала-шест.ерни 23 и обечайки 5. Угол поворота ограничивается упорами 38 и 39.
В момент выстоя обечайки пневмоци- линдр 19 (см. фиг.З) совершает один цикл возвратно-поступательного движения, которое преобразовывается за счет зубчато- реечной передачи, состоящей из зубчатого сектора 17 и рейки 18, в возвратно-качатель- ное движение вал-шестерни 15 (см. фиг.1) и далее через зубчатый сектор 14 ступицам 11,12 с закрепленными .на них копирами, Угол поворота ограничивается упорами 20 и 21. При этом копиры воздействуют на рычаги исполнительных механизмов, приводящие в действие рабочие органы позиций загрузки, ориентирования, отгибки 1-го ушка, отгибки 2-го ушка, а также механизм фиксации.
На позиции загрузки копир 43 оттягивает штифты 8 подвижной призмы 7 и заготовка пружины поступает из вибробункера через эжекционный пневмолоток 40 в отверстие между подвижной и неподвижной призмами до упора 42. При повороте обечайки штифты освобождаются от воздейст- вия копира и подвижная призма пружиной 9 зажимает заготовку. Технологическая схема загрузки показана на фиг.7.
На позиции ориентирования копир 49 воздействует на ролик 48 рычага 47 (см.фцг.4), входящего своими штифтами 51 в паз шайбы 52.
Шайба, упираясь через .пружину 54 в запорное кольцо 55, передает поступательное движение валику 53 с иглой 58. Игла входит во внутренний диаметр заготовки обрабатываемой пружины. Одновременно, с обратной стороны обрабатываемой заготовки, копир 63 (см.фиг.З) воздействует на ролик 62 рычага 61 -(см. фиг,4) с упором 66.
При дальнейшем повороте ступицы копир 93 (фиг.5) воздействует на штифты подвижной призмы, освобождая заготовку.
Теперь заготовка забазирована своим внутренним диаметром на игле и прижата за счет пружины к упору.
При дальнейшем повороте ступицы копир 94 воздействует на обрезиненный ролик, который совершает один-два оборота, увлекая валик и иглу с заготовкой пружины в сторону, противоположную стороне ориентирования.
При этом торец заготовки свободно скользит по спиральному выступу упора.
При обратном ходе пневмоцилиндра совершаются следующие операции.
Копир 94 вращает валик с иглой в противоположную сторону и в определенный момент горец заготовки упирается в зуб спирального упора, при этом вращающаяся игла начинает проскальзывать, а заготовка остается в ориентированном положении. Далее копиры 93 освобождают нижнюю призму, которая под воздействием пружины зажимает заготовку. После этого игла и упор
уходят в исходные положения. Операция ориентирования закончена. Технологическая схема операции ориентирования показана на фиг.З.
На позиции предварительной отгибки неподвижные пуансоны 68 (см. фиг.2) своей клиновой частью взаимодействуют при повороте обечайки 5 с крайними витками пружины, зажатой мехду призмами 6 и 7. В
результате крайние витки несколько отодвигаются в сторону, как это показано на фиг.9.
На позииии гибки первого ушка копир 72 {см.фиг.6) воздействует на ролик 71, сообщая последовательное движение направ- ляющей 70 с закрепленным на ней пуансоном. С.н.новременно копир 77 воздействует на ролик 76, сообщая поступательное движение клину 75. Клин воздействует на
ролик 81 рычага 80 и пуансон 82 через упорный винт а получает поступательное движение.
Пуансоны, воздействуя на крайний ви- ток заготовки, отгибают его в сторону, образуя первый зацеп пружины. При обратно-м ходе пневмоцилиндра пуансоны возвращаются в исходное положение пружинами 83 и 73.
Отгибка 2-го ушка осуществляется аналогичным образом, Технологическая схема отгибки ушек показана на фиг. 10 и 11.
На позиции выгрузки копир 95 (см. фиг.2) воздействует на штифты подвижной призмы, освобождая готовую пружину, которая струей воздуха из.трубки выбрасывается в тару. Технологическая схема позиции выгрузки показана на фиг. 12.
Механизм фиксации служит для точной остановки обечайки в заданном положении и работает следующим образом.
В момент выстоя обечайки 5 (см. фиг.1) и начала движения ступицы 12 закреплен- .ный на ступице копир 92 воздействует на ролик 91 рычага 86, поворачивая его вокруг оси 85. Под воздействием упорного винта 87 фиксатор 88, сжимая пружину 89, входит в фиксирующее отверстие б (см. фиг.2).
При обратном ходе ступицы фиксатор выходит из фиксирующего отверстия под .воздействием пружины.
Формула изобретения 1. Автомат для отгибки зацепов пружин растяжения, содержащий неподвижное основание и расположенные на нем поворотную обечайку с захватами для транспортирования заготовок пружин и инструментальные головки для отгибки зацепов, а также привод обечайки, инструментальных головок и захватов для транспортирования, о т л и ч a rout и и с я тем, что, с целью упрощения конструкции автомата за счет упрощения его кинематической схемы и повышения его надежности, основание поворотной обечайки выполнено в виде ступенчатого диска с двумя шейками, прч этом инструментальные головки жестко закреплены на торцах ступенчатого диска, а на шейках смонтированы с возможностью поворота введенные в автомат ступицы с закрепленными на них копирами, установленными с аозмож- ностьювзаимодействия с инструментальными головками и транспортирующими захватами, причем на одной из ступиц ус
0
Q 5
5
тановлен введенный в автомат зубчатый сектор привода копиров.
2.Автомат по п. 1,отличающийся тем, что поворотная обечайка выполнена в виде зубчатого колеса с внутренними зубьями, контактирующими с вал-шестерней, расположенной внутри неподвижного основания.
3.Автомат по п. 1,отличающийся тем, что захваты для транспортирование заготовок пружин выполнены в виде двух призм, расположенных в радиальных пазах обечайки, при этом верхняя призма жестко крепится к ободу обечайки, а нижняя призма постоянно подпружинена к верхней и снабжена штифтом, установленным с возможностью взаимодействия с копиром, закрепленным на ступице, установленной с возможностью поворота на шейке ступенчатого диска.
4.Автомат по п.1,отличающийся тем, что перед позицией отгибки зацепов на торцах неподвижного диска расположены неподвижные копиры, служащие для взэм- модействия с крайними .витками заготовки при повороте обечайки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления пружинных колец | 1982 |
|
SU1063517A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| Универсально-гибочный автомат с приводом от центральной шестерни | 1984 |
|
SU1245381A1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| АВТОМАТ РОТОРНЫЙ ДВУХУДАРНЫЙ ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ТИПА СПЕЦИАЛЬНЫХ ГВОЗДЕЙ | 1994 |
|
RU2078639C1 |
| Инструментальная головка для универсально-гибочного автомата | 1983 |
|
SU1255250A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| Автомат для подготовки электрическихпРОВОдОВ K МОНТАжу | 1978 |
|
SU845207A1 |
| Многопозиционный рабочий ротор | 1976 |
|
SU679374A1 |
Изобретение касается холодной обработки металлов давлением, в частности оборудования для изютовления пружин растяжения с двумя зацепами, и позволяет упростить конструкцию автомата и повысить его надежность Автомат выполнен по карусельной схеме с горизонтальной осью. Поворотная обечайка 5 имеет радиальные пазы с расположенными в них подвижной 7 и неподвижной 6 призмами для зажима и транспортирования
At
8ид&
шя Л1тЬ1
Вид 6
фигЗ
Г-Г
i i
tPut.5
79
Фиг.б
tf
)
воздух
| Патент ФРГ fsfe 3316712 | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
