ми 8, в которых установлены изоляционные шайбы 10. Последние связаны между собой электропроводным элементом в виде .стержня 11, имеюпщм ос- ла бляющую кольцевую проточку 12. Палец 5 подключен к электрической цепи контроля 1 целостности, пальцев и управления домкратами передвижения ба1335709
ки палец 5 ломается по одной из проточек 6 или 7. После разрушения пальца 5 нагрузки воспринимаются стержнем 11, который почти одновременно также разрывается, размыкая электрическую цепь контроле и управления агрегатом. Передвижка секции осуществляется после замены сломанного пальзы. При появлении аварийной перегруз- ,ца, 2 ил.
1
Изобретение относится к горной промышленности, а именно к выемочным агрегатам, имеющим жесткую фрон- тально вьщвигаемую на забой секционную базу.
Цель изобретения - повьшение надежности работы путем уменьшения расхождения секций при поломке пальца.
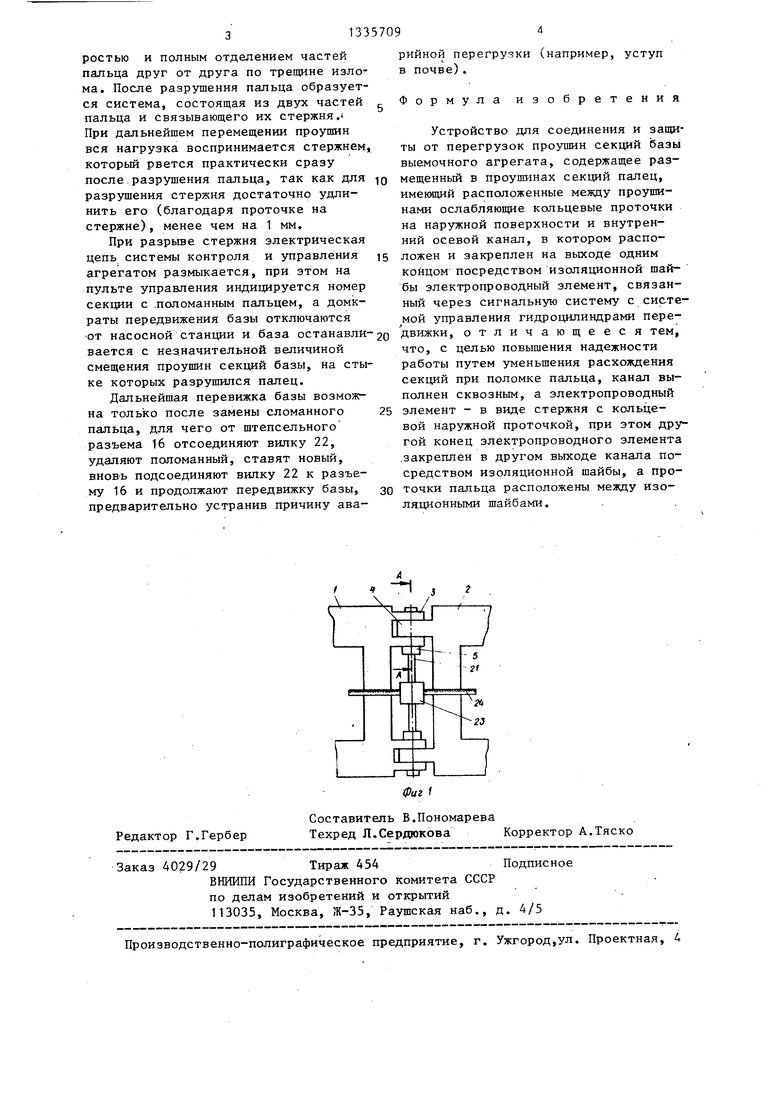
На фиг.1 изображено соединение секций базы выемочного агрегата, вид в плане; на фиг.2 - сечение А-А на фиг.1.
Соседние секции базы 1 и 2 снабже- ны проушинами 3 и 4, шарнирно соединенными пальцами 5, выполненными из малопластичной (закаленной) стали. Палец 5 имеет предохранительные ослабляющие проточки 6 и,7. Каждый палец вьтолнен с двумя, начинаюш:имися от торцов пальца расточками 8, соединенными друг с другом центральным сквоз- ньм каналом 9. В расточках по посадке установлены шайбы-изоляторы 10, связанные между собой электропроводным элементом, вьшолненным в виде стержня 11, имеющим ослабляющую кольцевую проточку 12, обеспечивающую незначительное удлинение стержня при разрыве разрушения пальца.
Глубина расточек 8 меньше, чем расстояние от торца пальца до ближайшей проточки 6 или 7, т.е. стержень 11 скреплен с пальцем вне проточек, что обеспечивает разрушение стержня при поломке пальца по любой из проточек 6 и 7. Гайками 13 стержень натянут с усилием, достаточным дпя полной выборки зазоров между гайка
ми, шайбами-изоляторами 10 и торцами расточек 8, что обеспечивает
0
5 0
5
0
5
0
при разрушении пальца мгновенную передачу усилий на стержень 11 без холостых осевых и поперечных смещений пальца относительно стержня.
Оба конца стержня посредством проводов 14 и 15 подключены к гнездам -штепсельного разъема 16, связанного винтами 17с пробкой 18, завинчиваемой в одну из расточек 8 пальца, конец которого охвачен гайкой 19. Для защиты от влаги и механического повреждения конец стержня и провод 14 залиты компаундом 20.
Через кабель 21, соединенный посредством вилки 22 с гнездами штепсельного разъема 16 и-электро.бло- ка 23, палец подключен к электрической цепи 24 контроля целостности пальцев и упра вления домкратами передвижения базы известной системы контроля и управления агрегатом.Палец работает слецуюлщм образом.
После установки пальца в проушины соседних секций соединением вилки 22 с штепсельным разъемом 16 палец подключается к электрической цепи 24 системы контроля и управления агрегатом. При отсутствии перегрузок в процессе передвижки базы пальцы 5 и стержень 11 сохраняет свою целостность и электрическая цепь 24 контроля целостности пальцев и управления домкратами передвижения базы известной системы контроля и управления агрегатом остается замкнутой.
При появлении аварийной перегрузки палец ломается по одной из проточек 6 или 7, причем разрушение пальца из малопластичной (закаленной) стали происходит при незначительном изгибе практически с мгновенной скоростью и полным отделением частей пальца друг от друга по трещине излома. После разрушения пальца образуется система, состоящая из двух частей пальца и связывающего их стержня. При дальнейшем перемещении проушин вся нагрузка воспринимается стержнем который рвется практически сразу после.разрушения пальца, так как для разрушения стержня достаточно удлинить его (благодаря проточке на стержне), менее чем на 1 мм.
При разрьше стержня электрическая цепь системы контроля и управления агрегатом размыкается, при этом на пульте управления индицируется номер секции с .поломанным пальцем, а домкраты передвижения базы отключаются
от насосной станции и база останавли-2о движки, отличающееся тем, вается с незначительной величиной смещения проушин секций базы, на стыке которых разрушился палец.
Дальнейшая перевижка базы возможна Только после замены сломанного 25 пальца, для чего от штепсельного разъема 16 отсоединяют вилку 22, удаляют поломанный, ставят новый, вноВ Ь подсоединяют вилку 22 к разъему 16 и продолжают передвижку базы, зо предварительно устранив причину авачто, с целью повышения надежности работы путем уменьшения расхождения секций при поломке пальца, канал выполнен сквозным, а электропроводный элемент - в виде стержня с кольцевой наружной проточкой, при этом другой конец электропроводного элемента .закреплен в другом выходе канала посредством изоляционной шайбы, а проточки пальца расположены между изо- лдционными шайбами.
рийной перегрузки (например, уступ в почве).
Формула изобретения
Устройство для соединения и защиты от перегрузок проушин секций базы выемочного агрегата, содержащее размещенный в проушинах секций палец, имеющий расположенные между проушинами ослабляюш 1е кольцевые проточки на наружной поверхности и внутренний осевой канал, в котором расположен и закреплен на вьжоде одним концом посредством изоляционной шайбы электропроводный элемент, связанный через сигнальную систему с сис.те- мой управления гидроцилиндрами передвижки, отличающееся тем,
что, с целью повышения надежности работы путем уменьшения расхождения секций при поломке пальца, канал выполнен сквозным, а электропроводный элемент - в виде стержня с кольцевой наружной проточкой, при этом другой конец электропроводного элемента .закреплен в другом выходе канала посредством изоляционной шайбы, а проточки пальца расположены между изо- лдционными шайбами.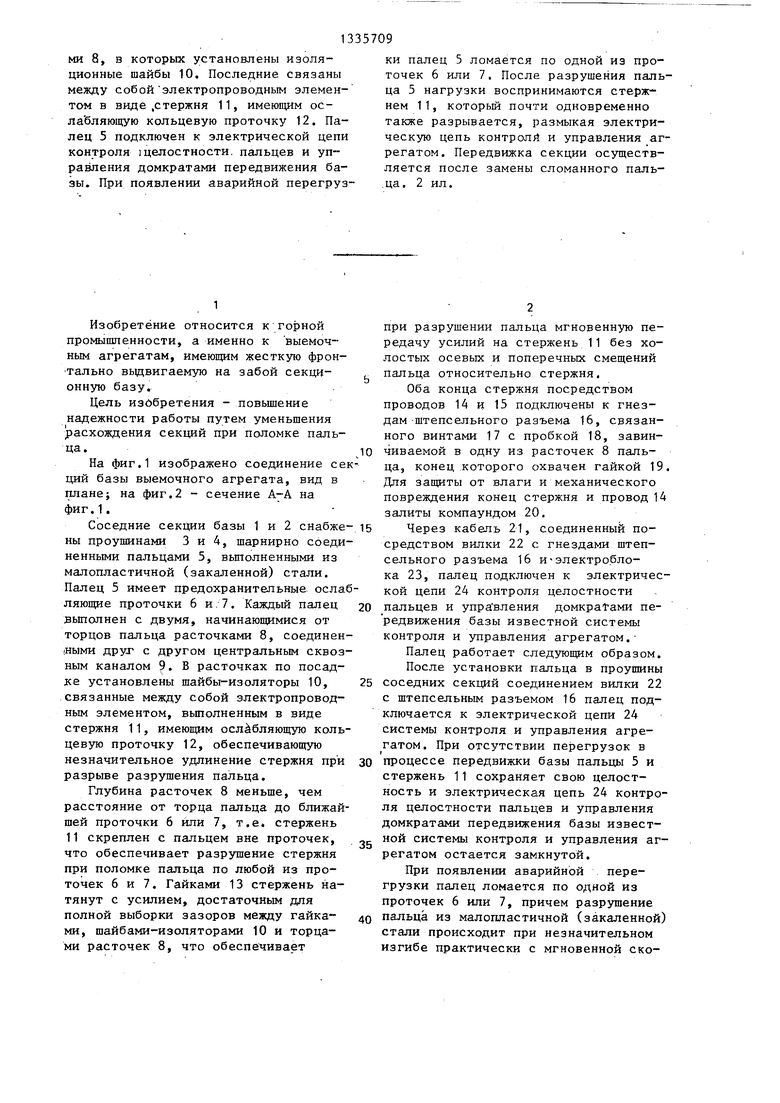
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для соединения секций базы выемочного агрегата | 1982 |
|
SU1016528A1 |
| Устройство для соединения секций базы выемочного агрегата | 1985 |
|
SU1270359A1 |
| Способ управления базовой балкой механизированной крепи в плоскости пласта | 1985 |
|
SU1320441A1 |
| Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения | 1978 |
|
SU775334A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1990 |
|
RU2028454C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Выемочный комплекс для крутых пластов | 1980 |
|
SU1021787A1 |
| Устройство автоматического поддержания заданной толщины стружки очистного агрегата | 1979 |
|
SU881343A1 |
| АГРЕГАТ ДЛЯ ВЫЕМКИ МОЩНЫХ КРУТОПАДАЮЩИХ ПЛАСТОВ | 1991 |
|
RU2037049C1 |
| СТРУГОВЫЙ КОМПЛЕКС, СЕКЦИЯ КРЕПИ, УСТАНОВКА СТРУГОВАЯ, БАЗА СТРУГОВАЯ, ПРИВОД СТРУГА, ПЕРЕГРУЖАТЕЛЬ УКОРОЧЕННЫЙ, КРЕПЬ СОПРЯЖЕНИЯ, МАНИПУЛЯТОР ПЕРЕДВИЖНОЙ | 1999 |
|
RU2163970C1 |
Изобретение относится к горной промышленности, а именно к выемочным агрегатам, имеющим жесткую фронтально выдвигаемую на забой секционную базу. Цель - повьшение надежности в работе путем уменьшения расхождения секций при поломке пальца. Соседние секции базы имеют проушины 3 и 4, шарнирно соединенные пальцем 5 с предохранительными ослабляю- пщми проточками 6 и 7. Палец 5 выполнен с осевьм каналом 9 и расточкаА-А (Л DO СО СП к :о П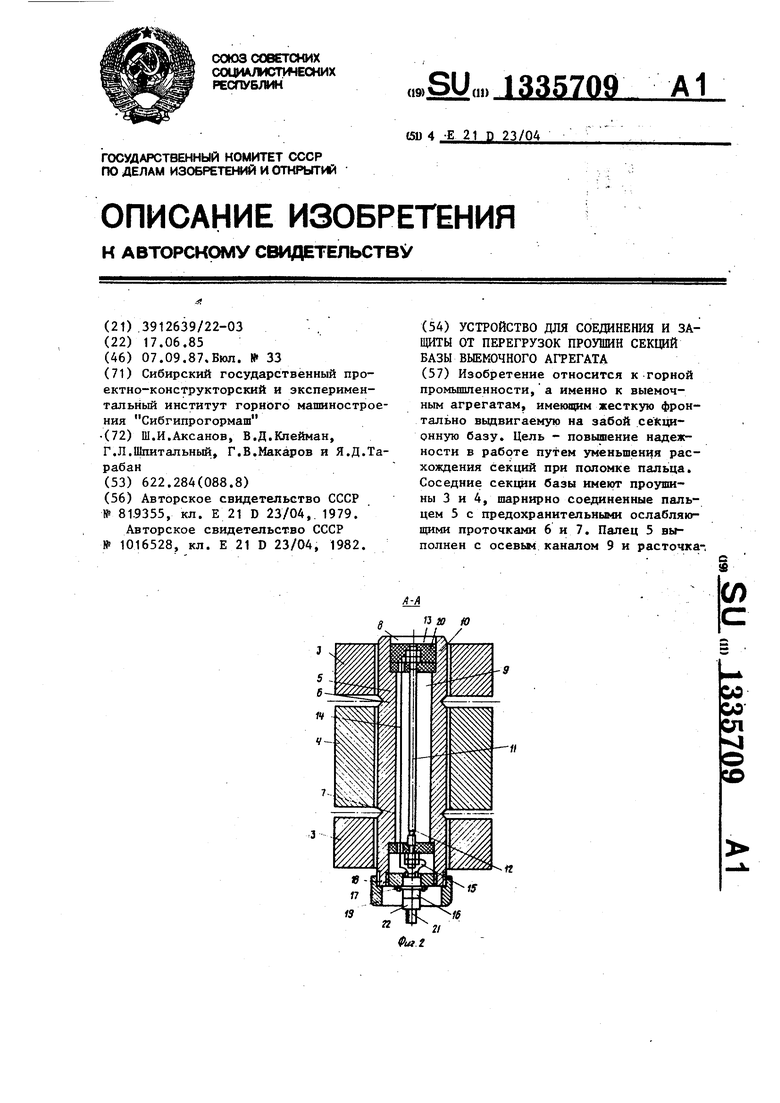
Редактор Г.Гербер
Фиг 1
Составитель Б.Пономарева
Техред Л.Сердюкова Корректор А.Тяско
Заказ 4029/29Тираж 454Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород,ул. Проектная, 4
| Горный компас | 0 |
|
SU81A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Устройство для соединения секций базы выемочного агрегата | 1982 |
|
SU1016528A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
