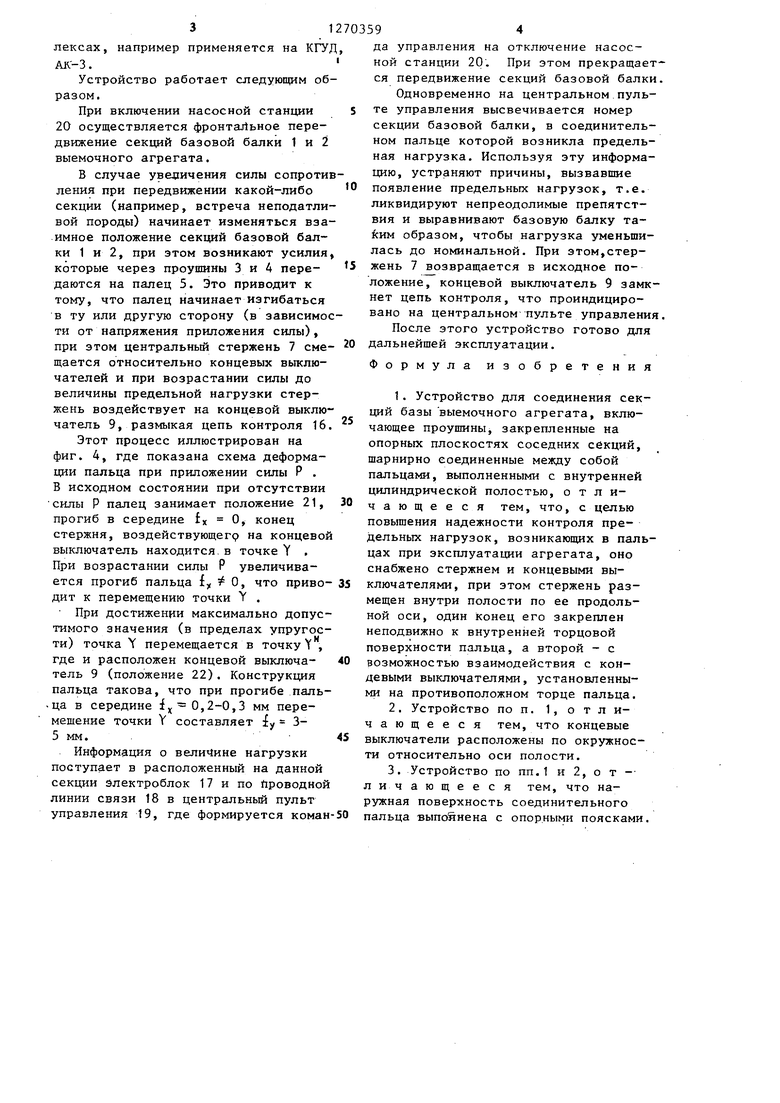
оси размещены стержень (С) 7 и концевой выключатель (KB) 9. Один конец С 7 закреплен неподвижно с одной стороны одного из П 5. Другой конец С 7 взаимодействует с KB 9, расположенным по окружности относительно полости 6. На наружной поверхности одного из П 5 имеются опорные пояски 14. При возникновении нагрузок в проушинах 3 и 4 усилие через пояски 14 передается на один из П 5,
который изгибается. При этом пропорционально смещается свободный конецС 7. При достижении передельной нагрузки С 7 воздействует на KB 9. Положение КВ 9, определяется заранее при тарировке и фиксируется винтом 13. Срабатывание КВ.9 приводит к размыканию цепи контроля, в результате чего отключается насосная станция, что приводит к прекращению роста нагрузок на п 5.2з.п.ф-лы,4ил.;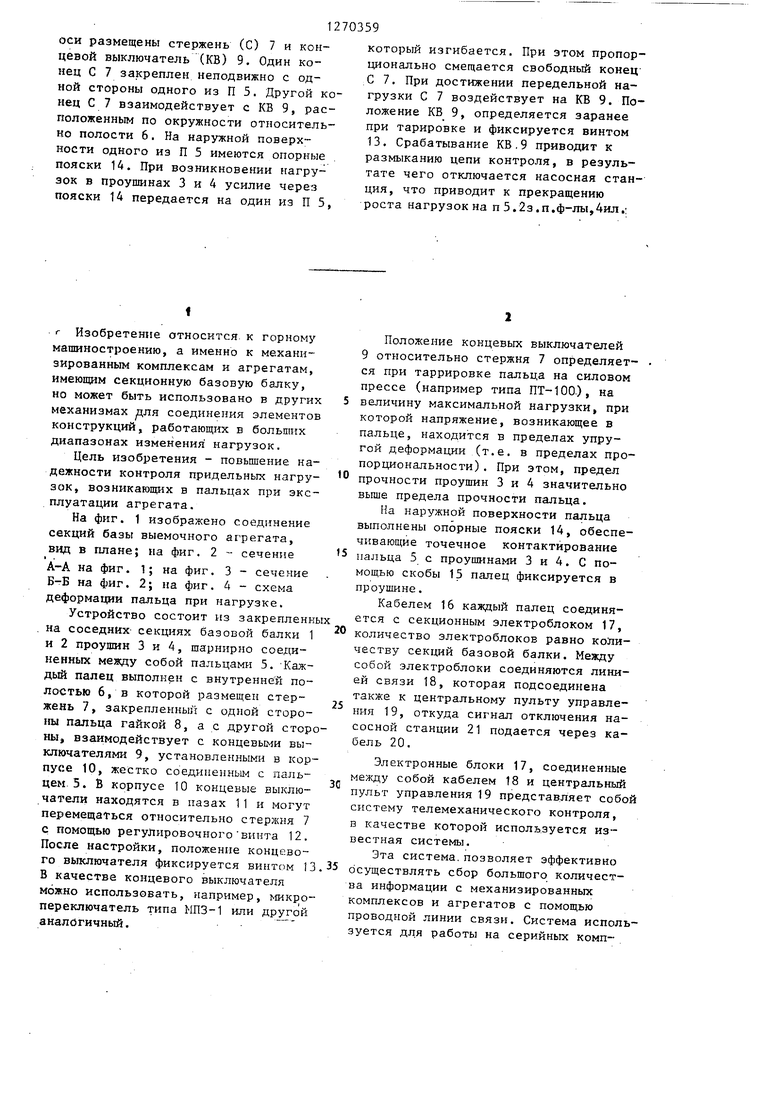
Изобретение относится к горному делу и предназначено для регистрации предельных критических значений нагрузок, возникающих в силовых конструкциях. Цель изобретения - повышение надежности сети контроля предельных нагрузок, возникающих в пальцах (П) 5 при эксплуатации агрегата. Каждый П 5 выполнен с полостью 6. Внутри полости 6 по ее продольной (Л
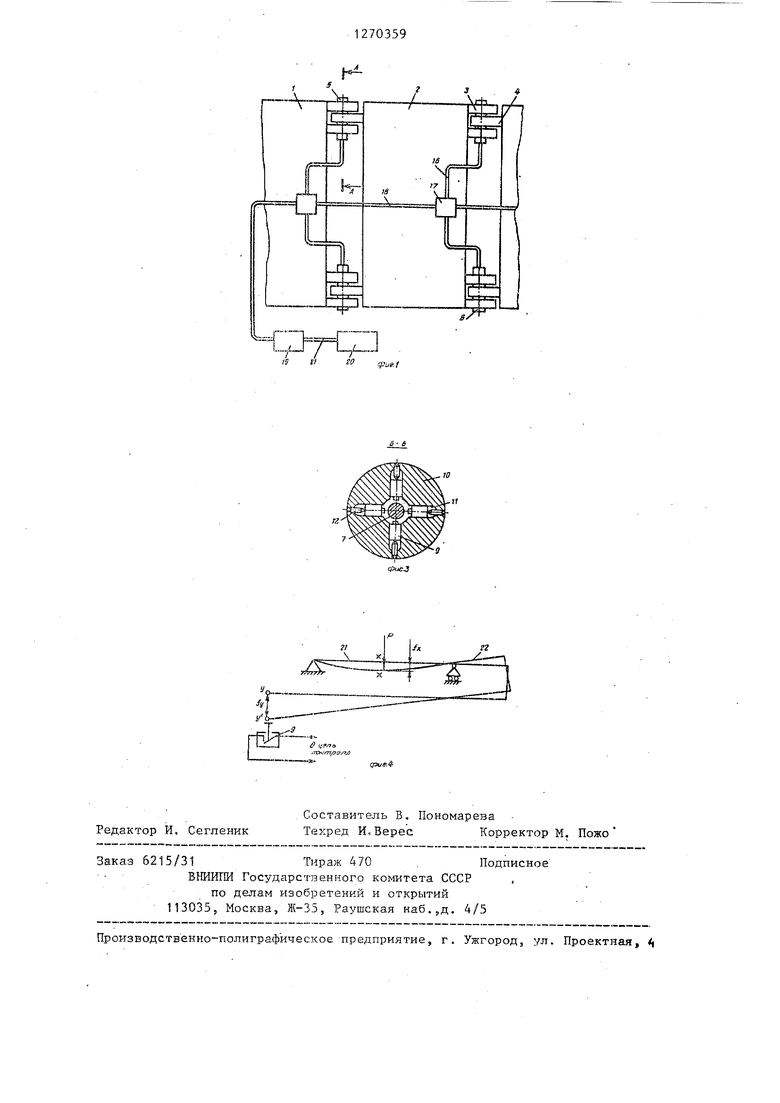
- Изобретение относится к горному машиностроению, а именно к механизированным комплексам и агрегатам, имеющим секционную базовую балку, но может быть использовано в других механизмах ля соединения элементов конструкций, работающих в больших диапазонах изменения нагрузок. Цель изобретения - повьшение надежности контроля придельньк нагрузок, возникающих в пальцах при эксплуатации агрегата. На фиг. 1 изображено соединение секций базы выемочного агрегата, вид в плане; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - схема деформации пальца при нагрузке. Устройство состоит из закрепленн на соседних- секциях базовой балки 1 и 2 проудшн 3 и 4, шарнирно соединенных между собой пальцами 5. -Каждый палец выполнен с внутренней полостью 6, в которой размещен стержень 7, закрепленнь й с одной стороны пальца гайкой 8, а с другой стор ны, взаимодействует с концевыми выключателями 9, установленными в кор пусе 10, жестко соединенным с пальцем. 5. В корпусе 10 концевые выключатели находятся в пазах 11 и могут перемещаться относительно стержня 7 с помощью регулировочноговинта 12. После настройки, положение концевого выключателя фиксируется винтом 1 В качестве концевого выключателя можно использовать, например, MHKJJO переключатель типа МПЗ-1 или другой аналогичный. Положение концевых выключателей 9 относительно стержня 7 определяет- . ся при таррировке пальца на силовом прессе (например типа ПТ-100.), на величину максимальной нагрузки, при которой напряжение, возникающее в пальце, находится в пределах упругой деформации (т.е. в пределах пропорциональности) . При этом, предел прочности проушин 3 и 4 значительно выше предела прочности пальца. На наружной поверхности пальца выполнены опорные пояски 14, обеспечивающие точечное контактирование пальца 5 с проушинами 3 и 4. С помощью скобы 15 пгшец фиксируется в проушине. Кабелем 16 каждый палец соединяется с секционным электроблоком 17, количество злектроблоков равно количеству секций базовой балки. Между собой электроблоки соединяются линией связи 18, которая подсоединена также к центральному пульту управления 19, откуда сигнал отключения насосной станции 21 подается через кабель 20. Электронные блоки 17, соединенные между собой кабелем 18 и центральный пульт управления 19 представляет собой систему телемеханического контроля, в качестве которой используется известная системы. Эта система, позволяет эффективно осуществлять сбор большого количества информации с механизированных комплексов и агрегатов с помощью проводной линии связи. Система используется ддя работы на серийных комп1 ., например применяется на КГУ лексах Устройство работает следующим об разом. При включении насосной станции 20 осуществляется фронтальное передвижение секций базовой балки 1 и 2 выемочного агрегата. В случае yвeJCIичeния силы сопроти ления при передвижении какой-либо секции (например, встреча неподатли вой породы) начинает изменяться вза имное положение секций базовой балки 1 и 2, при этом возникают усилия которые через проушины 3 и 4 передаются на палец 5. Это приводит к тому, что палец начинает изгибаться в ту или другую сторону (в зависимо ти от напряжения приложения силы), при этом центральный стержень 7 сме щается относительно концевых выключателей и при возрастании силы до величины предельной нагрузки стержень воздействует на концевой выклю чатель 9, размыкая цепь контроля 16 Этот процесс иллюстрирован на фиг. 4, где показана схема деформации пальца при приложении силы Р . В исходном состоянии при отсутствии силы Р палец занимает положение 21, прогиб в середине fx О, конец стержня, воздействушщегр на концевой выключатель находится.в точке Y При возрастании силы Р увеличивается прогиб пальца „ i О, что приводит к перемещению точки Y . При достижении максимально допустимого значения (в пределах упругости) точка Y перемещается в точку Y , где и расположен концевой выключатель 9 (положение 22). Конструкция пальца такова, что при прогибе паль-ца в середине ,2-0,3 мм перемешение точки Y составляет iy- 35 мм. Информация о величине нагрузки поступает в расположенный на данной секции Электроблок 17 и по йроводной линии связи 18 в центральный пульт управления 19, где формируется коман 94 да управления на отключение насосной станции 20. При этом прекращается передвижение секций базовой балки. Одновременно на центральном пульте управления высвечивается номер секции базовой балки, в соединительном пальце которой возникла предельная нагрузка. Используя эту информацию, устраняют причины, вызвавшие появление предельных нагрузок, т.е. ликвидируют непреодолимые препятствия и выравнивают базовую балку образом, чтобы нагрузка уменьшилась до номинальной. При этом,стержень 7 возвращается в исходное положение, концевой выключатель 9 замкнет цепь контроля, что проиндицировано на центральном пульте управления. После этого устройство готово для дальнейшей эксплуатации. Формула изобр е т е н и я 1. Устройство для соединения секций базы выемочного агрегата, включающее проушины, закрепленные на опорных плоскостях соседних секций, шарнирно соединенные между собой пальцами, выполненными с внутренней цилиндрической полостью, отличающееся тем, что, с целью повышения надежности контроля предельных нагрузок, возникающих в пальцах при эксплуатации агрегата, оно снабжено стержнем и концевыми выключателями, при этом стержень размещен внутри полости по ее продольной оси, один Конец его закреплен неподвижно к внутренней торцовой поверхности пальца, а второй - с возможностью взаимодействия с кондевыми выключателями, установленными на противоположном торце пальца. 2.Устройство по п. 1, о т л ичающееся тем, что концевые выключатели расположены по окружности относительно оси полости. 3.Устройство по пп.1 и 2, о т - личающееся тем, что наружная поверхность соединительного пальца выпойнена с опорными поясками.
| Устройство для соединения секцийбАзы ВыЕМОчНОгО АгРЕгАТА | 1979 |
|
SU819355A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для соединения секций базы выемочного агрегата | 1982 |
|
SU1016528A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
