Изобретение относится к системам программного управления н предназначено /ця плавного разгона, замедления и точного останова электроприводов производственных механизмов.
Цель изобретения -- повышение надежности устройства и улучшение динамических характеристик привода.
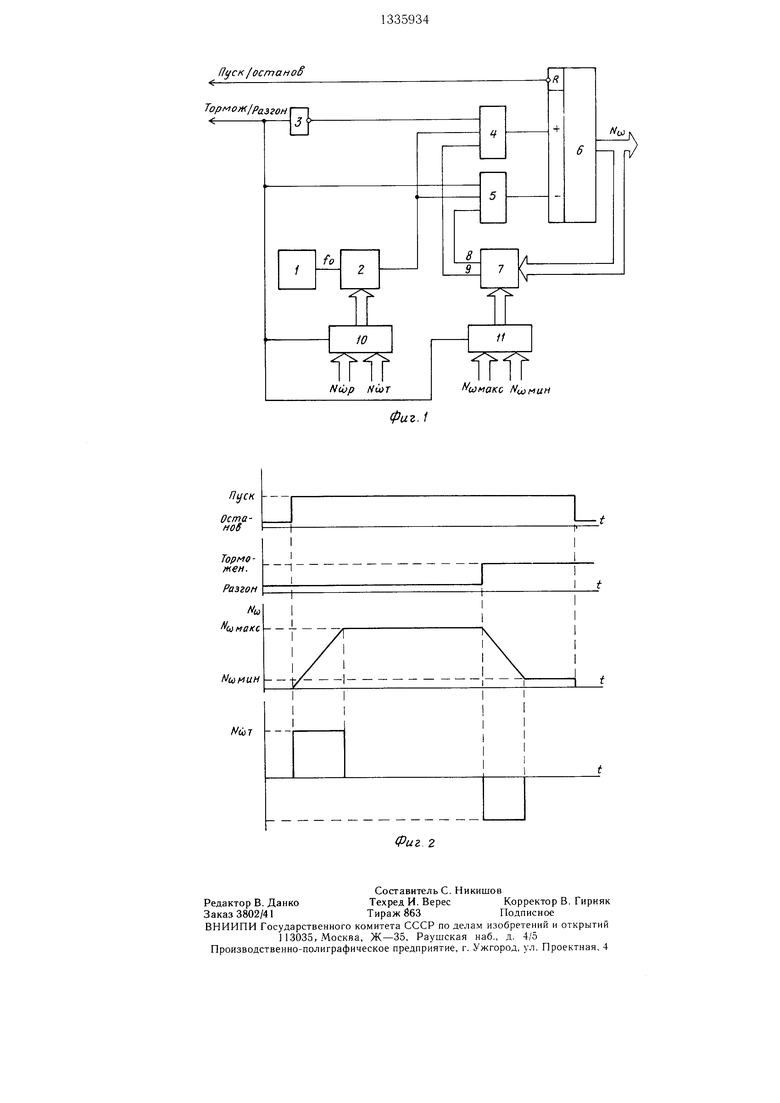
На фиг. 1 представлена блок-схема устройства для управления электроприводом;на фиг. 2 - диаграмма работы устройства.
Устройство содержит генератор 1 опорной частоты, управляемый делитель 2 частоты, элемент НЕ 3, первый 4 и второй 5 элементы И, реверсивный счетчик 6 импульсов, блок 7 сравнения с выходом «Л 1еньше 8 и «Больше 9, первый 10 и второй 11 коммутаторы.
Устройство работает следующим образом.
В исходпом состоянии (останов) низкий потенциал на шине «Пуск/останов поступает на вход R реверсивного счетчика 6, устанавливает и удерживает его в нулевом состоянии, независимо от состояния управляющей шины «Торможение/разгон. Для запуска привода сигнал «Торможение снимается и подается сигнал «Пуск, на выходе элемента НЕ 3 появляется высокий уровень напряжения, разрешающий поступление импульсов на суммирующий вход реверсивного счетчика 6 через элемент И 4. Интенсивность потока и.мпульсов определяется установкой Nip, поступающей с первой установочной njHHbi устройства через коммутатор 10 на управляемый делитель 2 частоты, на вход которого с генератора 1 поступают импульсы опорной частоты fo. При этом на вторые входы блока 7 сравнения через коммутатор 10 поступает уставка Ыи5.макс максимальной скорости. Разгон электропривода продолжается до тех пор, пока вых.одная кодовая комбинация NUI не достигнет величины Ышмакс. В этот момент сигнал с. выхода 9 блока сравнения закрывает низким уровнем элемент И 4, и увеличение параметра Ыш прекращается, электропривод работает на максимальной скорости.
При поступлении сигнала «Торможение на выходе элемента НЕ 3 появляется уровень логического «О, дополнительно блокирующий поступление импульсов на суммирующий вход реверсивного счетчика 6 через элемент И 4 и разрешающий их прохождение через элемент И 5 на вычитающий вход реверсивного счетчика 6. Одновременно коммутаторы 10 и 11 подключают к входам управляемого делителя 2 частоты и блока 7 сравнения вторую и четвертую установочные шины соответственно с уставками Ыйег и NW MHH, причем уставка NUS.MHH выбирается равной уставке скорости дотяжки . На выходе 8 блока 7 сравнения появляется сигнал, разрешающий поступление импульсов через элемент И 5 на вычитающий вход реверсивного счетчика 6. Величина скорости начинает уменьшаться с интенсивностью, определяемой пара.метром NUJT, до тех пор, пока не сравняется с Мшммн. В этот момент сигнал с выхода 8 блока 7 сравнения
низким уровнем запрещает дальнейшее поступление импульсов на вычитающий вход реверсивного счетчика 6, и электропривод работает на скорости дотяжки, определяемой параметром Ысомин. При поступлении сигнала «Останов на шину «Пуск/ос танов и далее на вход сброса реверсивного счетчика 6 на его выходе появляется нулевая комбинация и электропривод останавливается.
Предложенное устройство обеспечивает
5 возможность оперативного изменения значений минимальной и максимальной скорости электропривода,устраняет явление рывка при переходе с минимальной скорости на скорость дотяжки, сокращает число управляю- П1.ИХ линий и повышает за счет этого на0 дежность работы привода.
Формула изобретения
Устройство для управления электроприводом, содержащее генератор опорной частоты,
5 реверсивный счетчик импульсов, элемент НЕ, два элемента И, управляемый делитель частоты и блок сравнения, отличающееся тем, что, с целью повышения надежности и улучшения динамических характеристик, введены два коммутатора, причем первый и второй
0 входы первого коммутатора соединены соответственно с первой и второй установочными плинами устройства для управления электроприводом, первый и второй входы второго коммутатора связаны соответственно с третьей и четвертой установочными шина5 ми устройства для управления электроприводом, выход элемента НЕ подключен к первому входу первого элемента И, шина «Торможение/разгон устройства для управления электроприводом подключена к входу элемента НЕ, первому входу второго элемента И и управляющим входам первого и второго коммутаторов, выход генератора опорной частоты связан с тактовым входом управляемого делителя частоты, управляющий вход которого подключен к выходу первого
г коммутатора, выход второго коммутатора соединен с первым входом блока сравнения, второй вход которого подключен к выходу реверсивного счетчика импульсов и выходу устройства для управления электроприводом, выход управляемого делителя часто0 ты соединен с вторыми входами первого и второго элементов И, первый и второй выходы блока сравнения связаны с третьими входами соответственно первого и второго элементов И, выходы первого и второго элементов И подключены соответственно к сум5 мирующему и вычитающему входам реверсивного счетчика импульсов, вход сброса которого подсоединен к шине «Пуск/останов устройства для управления электроприводом.
0
Пуск foe тан об
1ПГ
Ышр HuiT
шт
имакс 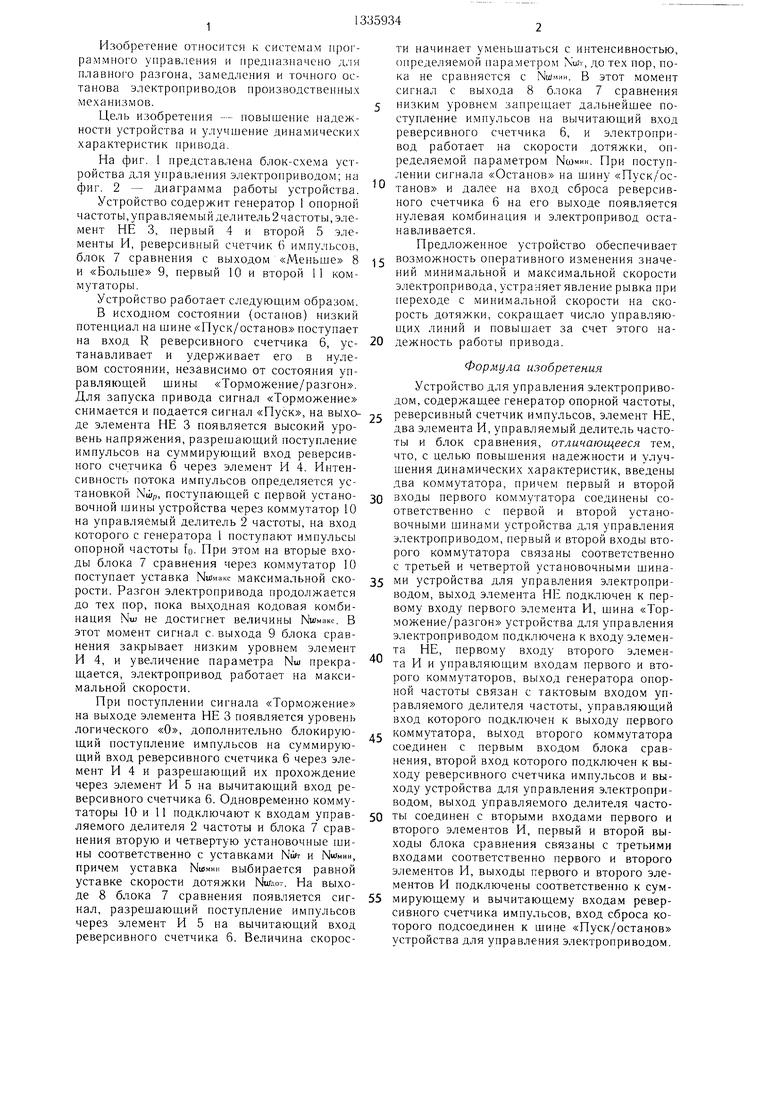
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Устройство для позиционного программного управления с самоконтролем | 1982 |
|
SU1072002A1 |
| Устройство для программного управления скоростью шагового электропривода | 1983 |
|
SU1137444A1 |
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1986 |
|
SU1361507A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Устройство для разгона и торможения электропривода | 1984 |
|
SU1177795A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1059012A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU928592A1 |
Изобретение относится к системам программного управления и предназначено для плавного разгона, замедления и точного останова электроприводов производственных механизмов. Целью изобретения является повышение надежности и улучшение динамических характеристик. Поставленная цель достигается тем, что для формирования переменной скорости движения электропривода введена цепь коррекции, позволяющая оперативно изменять максимальную и минимальную скорости, устранить явление рывка при переходе с максимальной скорости на скорость дотяжки. 2 ил. о со ел СО со 4
Пуск
Останов
Тор МО - тен.
Разгон
At
N,
и макс
| Двухконтурная система автоматического регулирования | 1984 |
|
SU1182484A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 1183942, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
