1
(61) 1488317
(21)4766452/02
(22)09.10.89
(46) 15.10.91. Бюл. №38
(71)Волгоградское обьединение Всесоюзного научно-исследовательского и проект- ного института по комплексной электрификации промышленных объектов Тяжпромэлектропроект им. Ф.Б.Якубовского
(72)А.М.Дубовец
(53) 669.054.2-282(088.8)
(56) Авторское свидетельство СССР
1488317, кл. С 21 С 7/10, 1987.
(54) СИСТЕМА ПРОГРАММНОГО УПРАВ ЛЕНИЯ ПРОЦЕССОМ ПОРЦИОННОЙ ВАКУУМНОЙ ОБРАБОТКИ СТАЛИ (57) Изобретение относится к автоматизации процесса порционной вакуумной обработки стали. Цель - повышение точности позиционирования, надежности работы и эффективности процесса вакуумной обработки стали. Для этого применено цифровое программирование движения с автоматически вычисляемой программой без предварительного набора программы с формированием ко мандных сигналов: разгон, замедления, до- тяжка. Это упрощает систему, повышает точность позиционирования в заданных положениях и надежность работы 1 ил.


Изобретение относится к внепечной обработке стали и предназначено для программного управления процессами порционной вакуумной обработки стали и является дополнительным к основному авт.св. № 1488317.
Цель изобретения - повышение надежности работы, точности позиционирования и расширение функциональных возможностей.
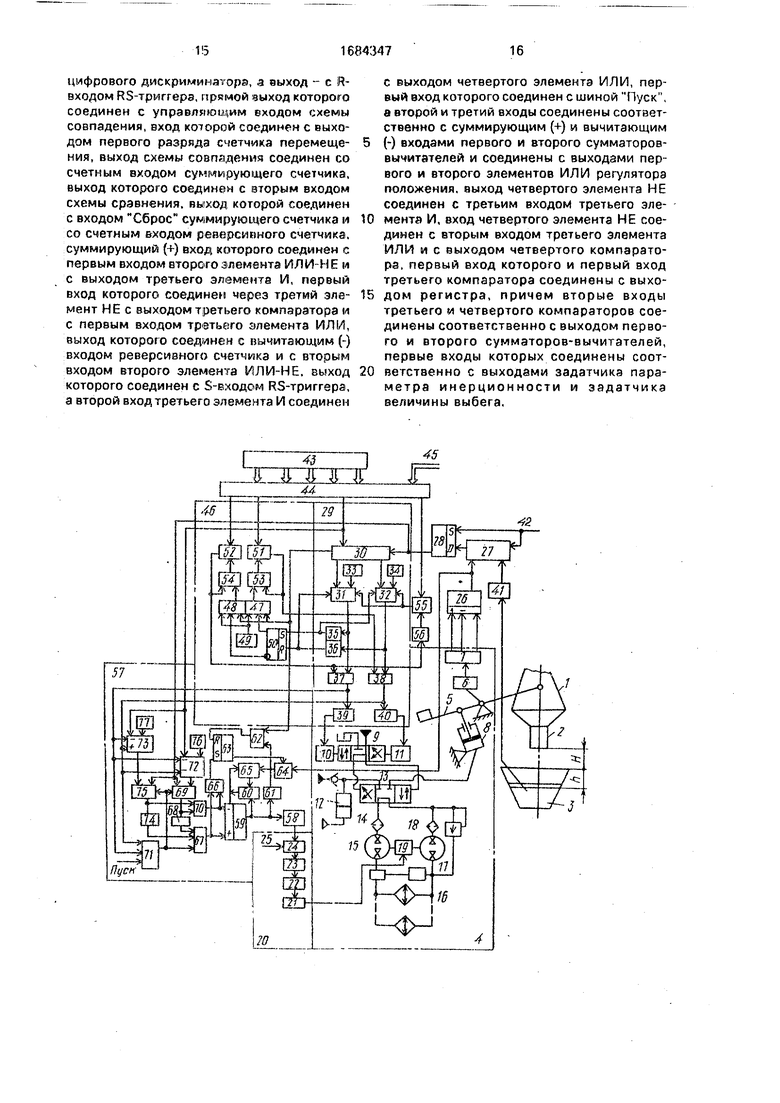
На чертеже представлена блок-схема системы.
Блок-схема содержит вакуум камеру 1 с всасывающим патрубком 2, сталерэзливоч- ный ковш 3 с металлом, гидропривод 4, состоящий из коромысла 5 с укрепленной на нем вакуум-камерой, ось которого через редуктор 6 кинематически связана с датчиком
(л
с
7 импульсов и гидравлически связанных между собой гидроцилиндра 8, электрогидравлического золотника 9 с первым и вторым электромагнитом 10, 11, аккумулятора 12, распределителя 13, первого фильтра 14 гидромотора 15, теплообменника 16. насоса 7, второго фильтра 18, электродвигатель 19 с блоком 20 управления, включающий преобразователь 21, контур 22 регулирования тока, контур 23 регулирования скорости, за- датчик 24 интенсивности, шину 25 пуска
Первый, второй и третий выходы датчи ка 7 импульсов соединены соответственно с входами сложения, вычитания и R-входом счетчика 26 перемещения, разрядные выходы которого соединены с первыми разряд ными входами сумматора 27 Разрядные выходы последнего через D-вход регистра
0
t
iCO
VJ
ю
28 соединена . перпым информационным входом ргг лчтора 2П положении состоящего из цифрового дискриминатора 30. первого и злрментов И 31 и 32 конечных выключателей } ч 1J крайних положений, первого и второго э/юменгов Ht 35 и 36, первого и второго э/к -.ентов ИЛИ 37 и 38 первого ii вюрого усипмтеля 34 и 40
Первый информационный вход регулятора 29 положения соединен ° пприиг ш раз ряднымивходамицифрового
дискриминатора 30 Пыхол 1 Меньше и Больше последнего сгецинрны гоогвегст- венно с первыми «ходами первою и дорого элементов И 31 и 32 Вторые входы их соответственно соединены с вы люмятепем 33 крайнего нижнего положении и с выключа телем 34 кртйчего полм гг ия а выходи гоогветст ч nijor входаш первого и второгоо злементог И Г 35, 36 и г первыми входами первого и второго - леменгов И ПИ 37 и 38 выходи которых ГОРДИНСПН соответ ственно с входами первою и второго угипи- телей 39 и 40, выходы которых соединены с первыми и вторыми входами гидропривода 4 и с входами первого и второго тлр тромэг нитов 10 и 11 электрпгмцраялиJPCKOIо золотника 9 Выходы первого м зторого элементов HF 35 и 36 j полются третьим и четвертым выходами рогуля гора 29 ппложс ния и входам1 второю и поркою элемент он И 31 и 32
Выход измерителя й уровня 1С чллг1 в ковше соединен с вторыми рчэролнмми входами сумматора 27, прэвлтоший вхпа которого соединен с ч/гдом легис грч 20 и с шиной V}. записи
Упртвтяющ й выход С .ска 43 зяцачгп пpoгpaм оедмне.. пп пя тщим эхсдом коммутатора К Перчы /, нюрои юетий и четвертый . вхол.ы послед него СО JMHCHM гоотне шепно . первым, вторым третщм и мяыходяг 5/ю кэ 43 задания программ
Информационная чина 5 or ACV If соединена с пятым информационным ахо дом коммутато(1а 44, г.рррмй информационный выход которого соединен с вторыми разрядными входами цифрового диггрими- натора 30 выход Равно кторпго СОРЦИ нен с первым входом рег/лятора 4R времени пауз м с первыми входами ею первого и второго элементов И &7 и 48 Вторые входы их объединены и соединены с в кодом re нератора 49 импульгоз а третьи гч сды соединены соотвегственно с прямым и инверсным выходами триггера 50 S- и R- входы которого являются вторым и фетьим входами регулятора 46 времени п iv-л л г-ое
соответственно с третг-игл и м твер- гьм входами регулятора 29 -тм/южения
Второй и третий информационные вы ходы коммутатора 44 соединены соответственно с первыми разрядными входами первого и второго компарзгорпр 51 и 52 регулятора 46 временных плуз вторые рз рядные входы которых соединены соот - ветственно с выходами первою второго
0 счетчиков 53 и 54 счетные входы которых Сординоьы соответственно с выходами пер- всго второго элементов И 47 и 48 Выход первого компаратора 51 соединен с вторым управляющим входом коммутатора 44 с R5 входом первого счетчика 53 и с вторым вхо дом второ о элемента ИЛИ 38 pei уля тора 29 положения
Выход второго ком оратора 52 обьеди- нгн с R-входом второю счетчика 54 и с вто0 рмм вводом nepfjoio элемента ИЛИ 37 ре уляторя 29 положения и соединен с тгегьим управляющим входом чоммутэтора 4 с счетным входом счетчика 55 циклов кгчаний выход которого соединен спервы
5 ми разрядными входами блока 56 срзвне ния вторые разрядные входы которого соединены с четвертым информационным выходом коммутатора 44, а выход с чет- РГ ртым входом первого и второ элементов
С И З1 и 32 регулятора 29 положения Допол- рврден формирователь 57 команд движения вакуумкамеры, содержащий циф- риащпоговый преобразоратель (ЦАП) 58, выход горого соединен с входом блока 20
/г рявчения через задэгчик 24 ии еисивно- сти. а вход - с выходом реверсивного счетчика 59 выходы которого поразрядно ооьединены с первыми входами схемы 60 сравнения и входами дешифратора 61 ко0 дов, выход которого соединен с первым входом первого элемента ИЛИ-НЕ 62, второй которого соединен с выходом Равно цифрового аискриминатора 30 а выход с R рходом R-S-григгера 63 Прямой выход
5 т риг ера 63 соединен с управляющим вхо дом схемы 64 впадения, вход которой со- одпнен с выходом первого разряда счетчика 2( перемещения. Выход схемы 64 совпадения соединен с счетным входом суммирую
0 щего счетчика 65, выход которого соединен с ьторым входом схемы сравнения 60, выход о-емы сравнения 60 соединен с входом брос суммирующего счетчика 65 и с счетным входом реверсивного счетчика 59
5Суммирующий (+) вход реверсивного
i-i егчика 59 соединен с первым входом вто- рпго элемента ИЛИ-HF 66 и с выходом третьего элемент з И , первый вход которого соединен через третий элемент НЕ 68 с РЫХОДОМ третьего компаратора 69 и с первым входом третьего элемента ИЛИ 70 Выход этого элемента соединен с вычитающим (-) входом реверсивного счетчика 59 и с вторым входом второго элемента ИЛИ-НЕ 66, выход которого соединен с S входом RS- триггера 63.
Второй вход третьего элемента И 67 соединен с выходом четвертого элемента ИЛИ 71, первый вход которого соединен с шиной Пуск, а второй и третий входы соединены соответственно с суммирующим () и вычитающим (-) входами первого и второго сум- матора-вычитателя 72 и 73 и соединены с выходами первого и второго элементов ИЛИ 37, 38 регулятора 29 положения, выход четвертого элемента НЕ 74 соединен с третьим входом третьего элемента И 67, вход четвертого элемента НЕ 74 соединен с вторым входом третьего элемента ИЛИ 70 и с выходом четвертого компаратора 75, первый вход которого и первый вход третьего компаратора 69 соединены с выходом регистра 28. Вторые входы третьего и четвертого компараторов 69 и 75 соединены соответственно с выходом первого и втрого сумматоров - вычитателей 72 и 73, первые входы которых соединены соответственно с выходами задатчика 76 параметра инерционности и задатчика 77 величины выбега.
Все блоки и узлы системы могут быть реализованы как аппаратным, так и программным путем на базе микропроцессорной техники.
В качестве измерителя 41 уровня металла в ковше 3 может быть использовано любое устройство измерения уровня, выполненное с возможностью хранения информации между замерами.
Блок 43 задания программ представляет собой четыре группы по два переключателя, каждый на десять позиций в двоичнодесятичном коде. Первая группа переключателей коммутирует по первому информационному выходу задание нижнего положения патрубка в ковше с металлом, вторая по второму информационному выходу-задание верхнего положения, третья по третьему информационному выходу - задания времени пауз при нижнем положении патрубка в ковше с металлом, а четвертая группа переключателей коммутирует по четвертому информационному выходу задание времени паузы при верхчем положении патрубка в ковше с металлом.
Блок 43 задания программ может быть реализован также с помощью набора клавиатуры с применением электронного номера набирателя на микросхеме К 145ИК8П,
Клавиатура может быть с аппаратным и программным фомированием выходного кодч. Клавиа1ура первого типа представляет собой функционально законченный эвтоном ный блок, на выходах которого формируется стандартный код. Тип клавиши (механиче- екая или сенсорная) не вличет на структуру блока 43 задания программ.
Коммутатор 44 может быть реализован на базе микросхем многорежимного буферного регистра типа К589ИР12 или на специализированном интерфейсе типа К580ИК55 с параллельным вводом-выводом информации. ЦАП 58 может быть выполнен на микросхемах К572ПА18.
Остальные узлы могут быть выполнены
с помощью цифровых микросхем.
Система программного управления процессом порционной вакуумной обработки стали работает следующим образом.
Перед началом вакуумировэния вакуумкамера 1 с всасывающим патрубком 2 поднимается в верхнее исходное положение под нее подается сталеразливочный ковш 3 с металлом, производятся технологические измерения. Перемещение вакуум-кэмеры 1
обеспечивается гидроприводом 4 путем поворота коромысла 5 вокруг оси. Угол поворота коромысла 5 через редуктор 76 отсчитывается датчиком 7 импульсов.
Одно плечо коромысла 5 кинематически
связано со штоком гидроцилиндра 8.
Команда на опускание вакуум-камеры 1 с всасывающим патрубком 2 формируется электрогидравлическим золотником 9 включением первого его электромагнита 10 при
обесточенном втором электромагните 11. При этом рабочая жидкость из аккумулятора 12 через распределитель 13, первый фильтр 14, гидромотор 15. теплообменники 16. насос 17, второй фильтр 18 поступает в бесштоковую полость гидроцилиндра 8, выдвигается и происходит опускание вакуум-камеры 1.
Гидромотор 15 создает на валу насоса 17 основную часть крутящего момента, остальную часть момента создает электродви- гатель 19, частота вращения ротора которого определяет скорость опускания г экуум-камеры 1.
Электродвигатель 19 управляется блокь .и 20 управления, структурная схема которого собрана по изиес.гнси схеме подчиненного регулирования и последовательной коррекции. Электродвигатель 19 управляется через преобразователь 21. В
блоке 20 управления используется внешний контур отрицательной обратной связи по скорости электродвигателя 19 и внутренний контур отрицательной обратной связи по току электродвигателя через дттчих тока
Контур регулятора 22 тока является подчиненным. На выходе его формируется сигнал, который подается на преобразователь 21. Регулятор тока 22 запускается сигналом с выхода регулятора 23 скорости, на вход которого поступает сигнал с выхода задат- чика 24 интенсивности, который запускается сигналом по шине 25 Пуск.
Команда на подъем вакуум-камеры 1 формируется электрогидравлическим золотником 9 при обесточенном первом его электромагните 10 и включением второго его электромагнита 11. Вакуум-камера 1 поднимается под действием противовеса, установленного на одном из плеч коромысла 5. При этом рабочая жидкость из бесшто- ковой полости гидро цилиндра 8 вытесняется в аккумулятор 12 через распределитель 13, первый фильтр 14, гидромотор 15, теплообменник 16, насос 17, второй фильтр 18.
При подъеме вакуум-камеры 1 гидромотор 15 притормаживается электродвигателем 19, частота вращения ротора которого определяет скорость подъема вакуум-камеры 1.
Теплообменники 16 предназначены для охлаждения рабочей жидкости, выходящей из гидромотора 15 и подаваемой на вход 17 насоса.
Количество одновременно работающих теплообменников 16 зависит от напряженности режима работы гидропривода 4 и тем- пературы окружающей среды. Каждый теплообменник 16 включается автоматически по сигналам от своего термосигнализатора. Чем выше температура подаваемого на вход насоса рабочей жидкости, тем больше теплообменников участвует в работе.
При подъеме вакуум-камеры 1 датчик 7 импульсов выдает сигналы с первого выхода на суммирующий вход счетчика 26 перемещения, а при опускании вакуум-камеры 1 - сигналы с второгоо выхода на вычитающий вход счетчика 26 перемещения В исходном положении с третьего выхода датчик 7 импульсов выдает сигнал, сбрасывающий в нуль счетчик26 перемещения, исключая при этом возможность наполнения ошибок от случайных помех.
С разрядных выходов счетчик 26 перемещения сигналы поступают на первые разрядные входы в сумматоре 27, с разрядных выходов которого сигналы через D-вход регистра поступают на первый информационный вход регулятора 29 положения и на первые разрядные входы цифрового дискриминатора 30. На одном из выходов Меньше или больше последнего формируется команда Спуск или Подъем, которая поступает соответственно на первые пходы первого или второго элементов И ч 1. 32 Ход вакуум-камеры 1 в нижнем положении ограничивается выключателем 33 крайнего нижнего положения, и в верхнем положении - выключателем 34 крайнего верхнею положения. При этом на вторые входы первого и второго элемента И 31, 32 поступают сигнал лог. О, который накладывает запрет на пе0 ремещение вакуум-камеры ниже или выше крайних положений. Первый и второй элементы И 31, 32 имеют взаимные блокировки соответственно через первый или второй элементы НЕ 35, 36.
5Поэтому на выходе только одного из
элементов И 31, 32 может появиться сигнал лог. 1.
На выходе первого элемента И 31 есть сигнал лог, 1 в том случае, если вакуум-каме0 ра движется вниз и она не находится в конечном нижнем положении и нет команды на подъем вакуум-камеры. На выходе второго элемента И 32 сигнал лог. 1 в том, случае, если вакуум-камера движется вверх и
5 она не находится в конечном верхнем положении и нет команды на опускание вакуум- намеры.
Сигнал с выхода первого элемента И 31 поступает на первый вход первого элемента
0 ИЛИ 37, а с выхода второго элемента И 32 - на первый вход втрого элемента ИЛИ 38, Сигнал с выхода первого элемента ИЛИ 37 через первый усилитель 39 переключает З лектр дрзвлический золотник 9 на опу5 екание вакуум-камеры путем включения первого электромагнита 10. а сигнал с выхода второго элемента ИЛИ 38 через второй усилитель 40 - на подъем вакуум-камеры включением второго электромагнита 11 и
0 обеспечиванием первого электромагнита 10.
Каждый раз перед началом процесса ва куумирования измерителем 41 уровня металла в ковше производят замер уровня h
5 металла относительно борта ковша. Эта величина h поступает на вторые разрядные входы сумматора 27. По сигналу с шины 42 записи в сумматоре 27 эта величина h суммируется с величиной Н, поступившей из
0 счетчика 26 перемещения, и перезаписывается в регистр 28.
Система имеет два режима работы: Автомат и Совет мастеру.
В режиме Автомат на управляющем
5 выходе блока 43 задания программ формируется сигнал лог. Г, который поступает на управляющий вход коммутатора 44. По этому сигналу на пятый информационный вход коммутатора 44 по шине 45 от АСУ ТП вводится задание нижнего и верхнего уровней
погружений патрубка в металл, а также время выдержек патрубка на этих уровнях.
В режиме Совет мастеру на учрзвля- ющем выходе блока 43 задания программ присутствует сигнал логического О. Предварительно в блоке 43 задания программ согласно расчетных данных от АСУ ТП устанавливается программа задания нижнего и верхнего уровней погружения патрубка в металл, а тлк//э время выдержек патрубка на этих уровнях. Эта программа задания с первого, второго, третьего, четвертого выходов блока 43 задания программы поступает на соответствующие входы коммутатора 44, с первого информационного выхода которого на вторые разрядные входы цифрового дискриминатора 30 поступает задание нижнего уровня погружения патрубка в металл. Так как эта величина много меньше текущего положения торца патрубка 2, поступившего на первый информационный вход цифрового дискриминатора 30, то на его выходе Меньше сигнал лог 1 По этому сигналу в регуляторе 29 положения первым элементом И 31 формируется команда на опускание вакуум-камеры 1 с всасывающим патрубком 2 в сталерачливочный ковш 3 с металлом, этой же командой через первый элемент НЕ 35 накладывается запрет на работу в регуляторе 29 положения второго элемента И 32. Сигнал лог. 1 с выхода первого элемента И 31 через первый элемент ИЛИ 37 и первый усилитель 39 держит первый электромагнит 10 во включенном состоянии. Патрубок 2 погружается в ковш 3 с металлом, и в вакуум-камеру 1 засасывается порция металла. При достижении заданного нижнего уровня торцом патрубка 2 на выходах Меньше, Больше цифрового дискриминатора 30 появится сигнал лог. О. При этом электромагниты 10, 11 обесточиваются, электрогидравлический золотник 9 устанавливается в нейтральное положение, и рабочая жидкость из аккумулятора 12 через распределитель 13 не поступает в бесшто- ковую полость гидроцилиндра 8 Вакуум - камера 1 с всасывающим патрубком 2 в ковше металлом останавливается в этом положении.
В результате сравнения на выходе Равно цифрового дискриминатора 30 появляется сигнал, который включает регулятор 36 времени пауз. Этот сигнал заведен на первые входы его первого и второго элементов И 47, 38, на вторые входы которых поступают тактовая частота от генератора 49 импульсов. Триггер 50 находится в состоянии 1, в которое он установлен сигналом логического О с выхода первого элемента НЕ 35 регулятора 29 положения Поэтому первый элемент И 47 срабатывает и нэ его вы ход поступают сигналы тактовой частоты от генератора 49 импульсов Второй элемент И 48 а это время закрыт.
5С второго и третьего информационных
выходов коммутатора 44 поступают задания времени выдержек патрубка для каждою заданного уровня погружения его соответственно на первые разрядные входы перео0 го и второго компараторов 51, 52 регулятора 46 пауз
Первый счетчик 53 через первый элемент И 47 запускается сигналами тактовой частоты от генератора 49 импульсов. На вы5 ходе первого счетчика 53 отсчитывается время нахождения патрубка 2 на заданном уровне погружения по формуле t Т. № , где Т период следования сигналов № число импульсов, отсчитанное счетчиком
0Отсчитанное время первым счетчиком
53 поступает на вторые разрядные входы
первого компаратора 51 регулятора 46 пауз
При равенстве отсчитанного времени
счетчиком 53 по данному времени выдерж5 ки, на выходе первого компаратора 51 появляется единичный сигнал, который на первый информационный выход коммутатора 44 подключает задание верхнего уровня погружения и через второй вход второго
0 элемента ИЛИ 38 и второй усилитель 40 включает второй электромагнит 11. а пер вый счетчик 53 регулятора 46 пауз сбрасывает.
Под действием противовеса рабочая
5 жидкость из бесштоковой полости гидроцилиндра 2 вытесняется в аккумулятор 12 через распределитель 13, и вакуум-камера 1 с всасывающим патрубком 2 поднимается При подьеме вакуум-камеры захваченная ее
0 порция металла сливается обратно в ковш и смешивается с остатком стали в нем
Когда торец патрубка 2 достигнет заданного верхнего уровня погружения то на выходе Больше цифрового дискриминато5 ра 30 сигнал лог. 1 исчезает. При этом элек- тромагниты 10 и 11 находятся в обесточенном состоянии, а электрогидрав чический золотник устанавливается в неит гчльное положение, циркуляция рабочей
0 ж дкости в гидроприводе 4 прекращается и вакуум-камера 1 с всасывающим патрубком 2 в ковше 3 с металлом останавливается в заданном положении. В результате сравне ния на выходе Равно цифрового дискри
5 минатора 30 появляется сигнал лог 1 По этому сигналу открывается второй элемент И 48 регулятора 46 пауз и запускается второй счетчик 54, который отсчитывает промя выдержки патрубка в верхнем урорн Отсчитанное это время с выходя рп п п :,.-,
т/.ка М поел ynaei на вторые разрядные входы НТРООГО к,мп;фатора 5 Когда время, отсчитанное вторым счетчиком 54 регулятора 46 рарно заданному времени выдержек, то на выходе второго компаратора 52 появляется сигнал логической 1, который на первый информационный выход коммутатора 44 подключает задание нижнего уровня погружения, сбрасывает в О второй счетчик 54 регулятора 46 пауз и через второй вход первого .элемента ИЛИ 37 и в первый усилитель 39 регулятора 29 положе ния включает первый электромагнит 10. Эпектрогидрарлический золотник 9 гидропривода 4 формирует команду на опускание ракуум-камеры г цт л вакуумирования продолжается Одновременно сиг налом логической 1 с выхода ВТОРОГО компаратора 54 регулятора 46 nav3 запускается счетчик 55 циклов качаний,
Цикл качания состоит из двух периодов: движение вакуум камеры вниз, останов, выдержка паузы в нижнем уровне погружения патрубка движение вакуум-камеры вверх, останов, выдержка паузы в верхнем уровне погружения патрубка Счетчик 55 циклов качаний производит отсчет этих циклов и полает на пеовые разрядные входы блока 56 с равнения
Когда число циклов, отсчитанное счет- чч-ом 55 циклов качаний, сравняется с за- цагп шм числом циклов, поступившим с -сгчерто 1нфо М г; нного выхода юм- мугаюра 44 на вторые разрядные входы Спока 5С: сравнения то на выходе ею пояа- потся сигнал лог. О . По JTOMV сигналу первый я ысчюй элементы И 31, 32 регулятора 29 положения закрываются, формиро пчние команд Опускание или Подъем прерывается электромагниты 10. 11 гидропривода 4 гюесючивяются Электргтидрац- лический золотник 9 устанавливается в нейтральное положение.
Перемещение вакуум-камеры в заданное положение производится при наличии соответствующей команды Спуск или Подъем и условий, разрешающих это перемещение.
Для обеспечения заданной точности позиционирования торца патрубка вакуум-камеры относительно заданных положений гикуум камера должна перемеща гься в трех последовательно сменяющихся режимах: на первом производится Разгон и перемещение на максимальной скорости, на втором - Замедление на третьем - Цотяжка. останов и стабилизация последнего
Гидропривод 4 перемещения вакуум-камеры имеет постоянную интенсивное разгона и торможения. Поэтому для формирования управляющих сигналов может быть применено цифровое программирование движения с автоматически вычисляемой
программой без предварительного набора программы, Это осуществляет дополнительно введенный формирователь 57 команд движения вакуум-камеры, который работает слэдующим образом. Сигнал с выхода ЦАП
0 58 поступает через вход блока 20 управления на задатчик 24 интенсивности. На вход ЦАП 58 поступает код с вы/ода реверсивного счетчика 59. Этот код также поступает на первый вход схемы сравнения 60 и на вход
5 дешифратора 61 кодов. Сигнал с выхода дешифратора 61 кодов поступает на первый вход первого элемента ИЛИ-НЕ 62, на вто- рсй вход которого поступает сигнал с выхода Равно цифрового дискриминатора 30.
0 RS-триггер 63 устанавливается в О логическим путем на выходе первого элемента ИЛИ-НЕ 62. Схема совпадения 64 открывается, когда R-триггер 63 находится в состоянии 1. В этот момент через схему 64
5 совпадения на счетный вход суммирующего счетчика 65 поступают импульсы с выхода первого разряда счетчика 26 перемещения. Суммирующий счетчик 65 и реверсивный счетчик 59 выполнен одинаковой емко0 сти. Перед пуском счетчики 59 и 65 устанавливаются в нулевое состояние,
Через элемент ИЛИ-НЕ 66, третий элемент И 67, третий элемент НЕ 68 и при няг,ич1. но выходе третьего компаратора 69
5 сигнала О третий элемент ИЛИ 70 блокируется и сигнал Разгон поступает через четвертый элемент ИЛИ 71 на суммирующий (+) вход реверсивного счетчика 59. При этом RS-триггер 63 устанавливается в 1
0 60 сравнения и цепь сброса суммирующего счетчика 65 образуют обратную связь, устанавливающую счетчик 65 в нуле- аое состояние, когда код № 1 суммирующего счетчика достигает кода № 2. находящегося
5 в этот момент времени в реверсивном счетчике 59. Схема сравнения работает по логике больше-меньше. Появление сигнала на в 31ходе схемы сравнения 60 происходит при N: 1 и № 2, что вызывает сброс в нуль сум0 мирующего счетчика 65 и увеличение кода N 2 на единицу при команде Разгон При команде Замедление происходит уменьшение кода № 2 на единицу.
Команда Замедление формируется
5 наличием сигнала 1 на выходе третьего кчмпэрзтора 69, который поступает чеоез тоетий элемент ИЛИ 70 на вычитающий (-) вход реверсивного счетчика 59 Присутствует cm нэп 1 на выходе третьего компарато- оа 69, когда код на выходе первого
сумматора-вычитателя 72 отлижет ся от кода текущего положения на выходе регистра 28. С приходом команды Замедление гни- мается команда Разгон сигналом О на выходе третьего элемента НЕ 68.
Команда Разгон формируется наличием сигналов на шине Пуск, Движение вниз или Движение вверх на выходах первого элемента ИЛИ 37 или второго элемента ИЛИ 38 регулятора 29 положения. При наличии команды Разгон другие команды снимаются сигналом 4 на выходе четвертого элемента ИЛИ 71.
Для организации точного позиционирования вводится команда Дотяжка, при которой гидропривод 4 отрабатывает конечный участок пути на скорость дотяжки, величина которой выбирается таким образом, чтобы исключить Выбег при останове.
Команда Дотяжка формируется вторым сумматором-вычитателем 73.
С приходом команды Дотяжка накладывается запрет сигналом О на выходе четвертого элемента НЕ 74 и команда Разгон снимается сигналом О на выходе третьего элемента И 67.
Появление на выходе четвертого компаратора 75 сигнала 1 является началом формирования команды Дотяжка, которая через третий элемент ИЛИ 70 поступает на вычитающий (-) вход реверсивного счетчика 59. При этом сигналом О на выходе четвертого элемента НЕ 74 по третьему входу третьего элемента И 67 блокируется команда Разгон.
Процесс Замедления гидропривода 4 начнется при подходе к участку, равному параметру инерционности до останова. С помощью задатчика 76 этот параметр устанавливается. При движении вакуум-камеры вниз первый сумматор-вычитатель 72 от заданной величины на первом выходе коммутатора 44 отнимается параметр инерционности, а при движении вверх к этой величине прибавляет параметр инерционности.
В этот момент сигнал 1 с выхода третьего компаратора 69 через третий элемент ИЛИ 70 поступает на вычитающий (-) вход реверсивного счетчика 59.
В этом случае сигналы со схемы сравнения 60 вызывают уменьшение кода № 2.
При отработке конечного участка пути протекает процесс Дотяжки. С помощью задатчика 77 устанавливается величина выбега.
При движении вакуум-камеры вниз второй сумматор-вычитатель 73 вычитает от заданного положения величину выбега, а при
движении вверх к заданному положению прибавляет величину выбега. В этой зоне участка срабатывает четвертый компаратор 75 и сигналом 1 через четвертый элемент 5 НЕ 74 закрывает третий элемент И 67 При этом команда Разгон снимается, а третий элемент сигнал 1 поступает на вычитающий (-) вход реверсивного счетчика 5У. и сигналы со схемы сравнения 60 вызывают
0 уменьшение кода № 2. Гидропривод 4 нами нает работать на скорости Дотяжки. По отработке рассогласования с выхода Равно цифрового дискриминатора 30 на второй вход первого элемента ИЛИ-НЕ 62
5 выдается команда Останов и система возвращается в исходное положение.
Код реверсивного счетчика 59 является цифровым выражением управляющего сигнала на выходе ЦАП 58.
0Интенсивность разгона можно задавать
масштабным коэффициентом ЦАП 58,
После выполнения программы вакууми- рования вакуум-камера 1 с всасывающим патрубком 2 останавливается в верхнем
5 уровне погружения патрубка. С этого момента процесс вакуумирования прекращается. Оператор вручную выполняет технологические операции. После этого ва куум камеру 1 поднимают в верхнее исход
0 ное положение, всасывающий патрубок 2 выводится из ковша 3 с металлом.
Применение изобретения позволяет повысить точность позиционирования, исключаются рывки, улучшается качество
5 управления процессом вакуумирования, расширяются функциональные возможно сти, увеличивается надежность системы.
Экономическая эффективность системы связана с повышением качества вакуумной
0 обработки и возрастает при аетоматиче ском управлении.
Формула изобретения Система программного управления процессом порционной вакуумной обработ5 ки стали по авт.св. № 1488317, отличаю щ а я с я тем, что. с целью повышения надежности работы, точности позиционирования и расширения функциональных возможностей, в нее дополнительно введен
0 ф рмирователь команд движения вакуум камеры, содержащий цифроаналоговый преобразователь, выход которого соединен с входом блока управления через задатчик интенсивности, а вход с выходом ревер
5 сивного счетчика, выходы которого пораз рядно объединены с первыми входами схемы сравнения и входами дешифратора кодов, выход которого соединен с первым входом первого элемента ИЛИ-НЕ, второй вход которого соединен с выходом Рарно
цифрового дискриминатора, а выход - с R- входом RS-триггерэ, прямой выход которого соединен с управляющим входом схемы совпадения, вход которой соединен с выходом первого разряда счетчика перемещения, выход схемы совпадения соединен со счетным входом суммирующего счетчика, выход которого соединен с вторым входом схемы сравнения, выход которой соединен с входом Сброс суммирующего счетчика и со счетным входом реверсивного счетчика, суммирующий (+) вход которого соединен с первым входом второго элемента ИЛИ-НЕ и с выходом третьего элемента И, первый вход которого соединен через третий элемент НЕ с выходом третьего компаратора и с первым входом третьего элемента ИЛИ, выход которого соединен с вычитающим (-) входом реверсивного счетчика и с вторым входом второго элемента ИЛИ-НЕ. выход которого соединен с S-входом RS-триггера, а второй вход третьего элемента И соединен
с иыходом четвертого элемента ИЛИ, первый вход которого соединен с шиной Пуск, а второй и третий входы соединены соответственно с суммирующим (+) и вычитающим
(-) входами первого и второго сумматоров- вычитателей и соединены с выходами первого и второго элементов ИЛИ регулятора положения, выход четвертого элемента НЕ соединен с третьим входом третьего элемента И, вход четвертого элемента НЕ соединен с вторым входом третьего элемента ИЛИ и с выходом четвертого компаратора, первый вход которого и первый вход третьего компаратора соединены с выходом регистра, причем вторые входы третьего и четвертого компараторов соединены соответственно с выходом первого и второго суммэторов-вычитателей, первые входы которых соединены соответственно с выходами задатчика параметра инерционности и задатчикэ величины выбега.
42
