Гироскоп, установленный таким образом, что ось его кожуха может неремещаться только в горизонтальной плоскости, будет уходить из плоскости меридиана с угловой скоростью 651Пф, где U - угловая скорость вращения земли, -широта места. Для гироскопов направления необходима компенсация такого ухода (широтная -коррекция). Широтную коррекцию осуществляют, прикладывая к гироскопу люмент, заставляющий его прецессировать со скоростью ухода гироскопа из плоскости меридиана, но в противоположную сторону.
Если коррекцию производить прн помощи груза, то при перемещении груза вручную возникает неопределенный уход гироскопа, поэтому такое перемещение приходится производить возможно реже. Известные системы непрерывной, коррекции, содержащие индукционный двигатель, имеют кинематическую схему и нуждаются в дополнительном устройстве, вырабатывающем момент, пропорциональный синусу широты.
Предлагаемое устройство не имеет указанных недостатков благодаря тому, что статор индукционного двигателя установлен на валу, параллельном оси прецессии гироскопа, и вырабатывает момент, пропорциональный синусу теографичеокой щироты.
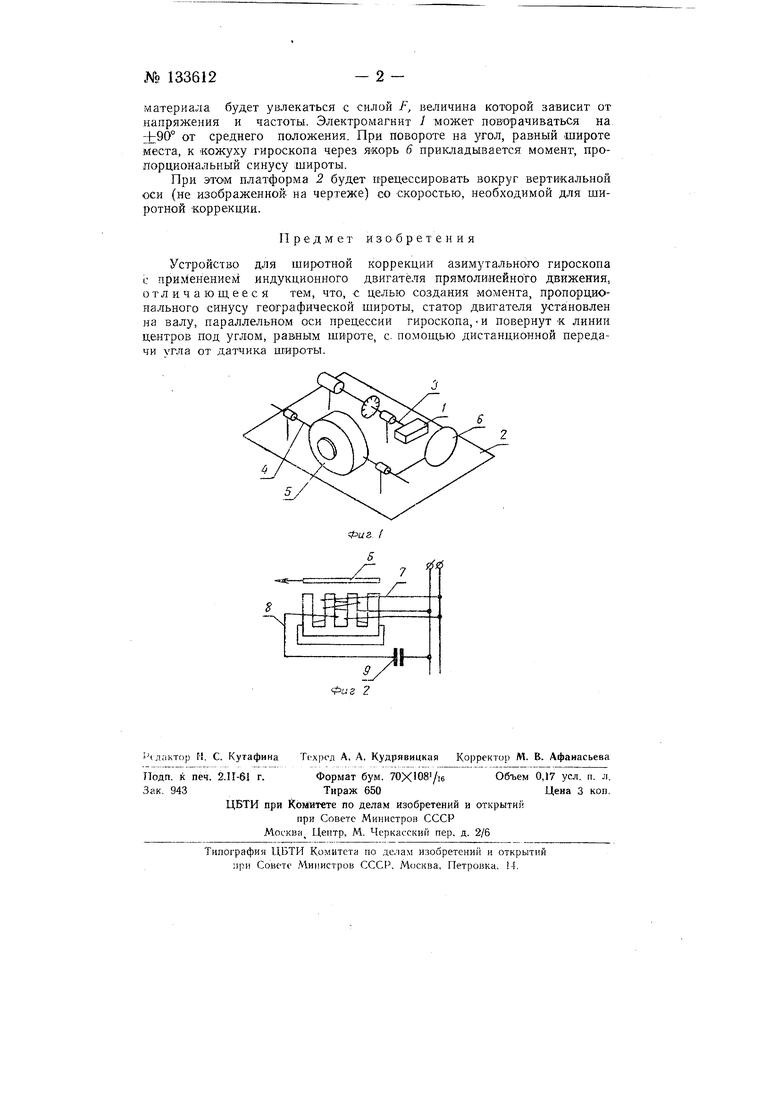
На фиг. 1 приведена схема устройства; на фиг. 2 - электромагнит индукционного двигателя.
Электромагнит / установлен на платформе 2 и может поворачиваться на оси 3, параллельной оси 4 кожуха гироскопа 5. На оси 4 ко жуха гироскопа укреплен якорь 6. Электромагнит имеет две обмотки 7 и 8, магнитные поля которых, питаемые переменным током от сети, с помощью Конденсатора 9, сдвинуты по фазе на 90°. Результирующее магнитное поле обмоток перемещается вдоль прямой, соединяющей полюса сердечников. Помещенный в это поле якорь 6 из немагнитного
материала будет увлекаться с силой F, величина которой зависит от напряжения и частоты. Электромагнит 1 может поворачиваться на. +90° от среднего положения. При повороте на угол, равный широте места, к «ожуху гироскопа через якорь 6 прикладывается момент, пропорциональный синусу широты.
При этом платформа 2 будет ггрецессировать вокруг вертикальной оси (не изображенной на чертеже) со скоростью, необходимой для широтной коррекции.
Предмет изобретения
Устройство для широтной коррекции азимутального гироскопа с применением индукционного двигателя прямолинейного движения, отл и ч а ю ш, еес я тем, что, с целью создания момента, пропорционального синусу географической широты, статор двигателя установлен на валу, параллельном оси прецессии гироскопа, и повернут к линии центров под углом, равным широте, с. помош:ью дистанционной передачи угла от датчика широты.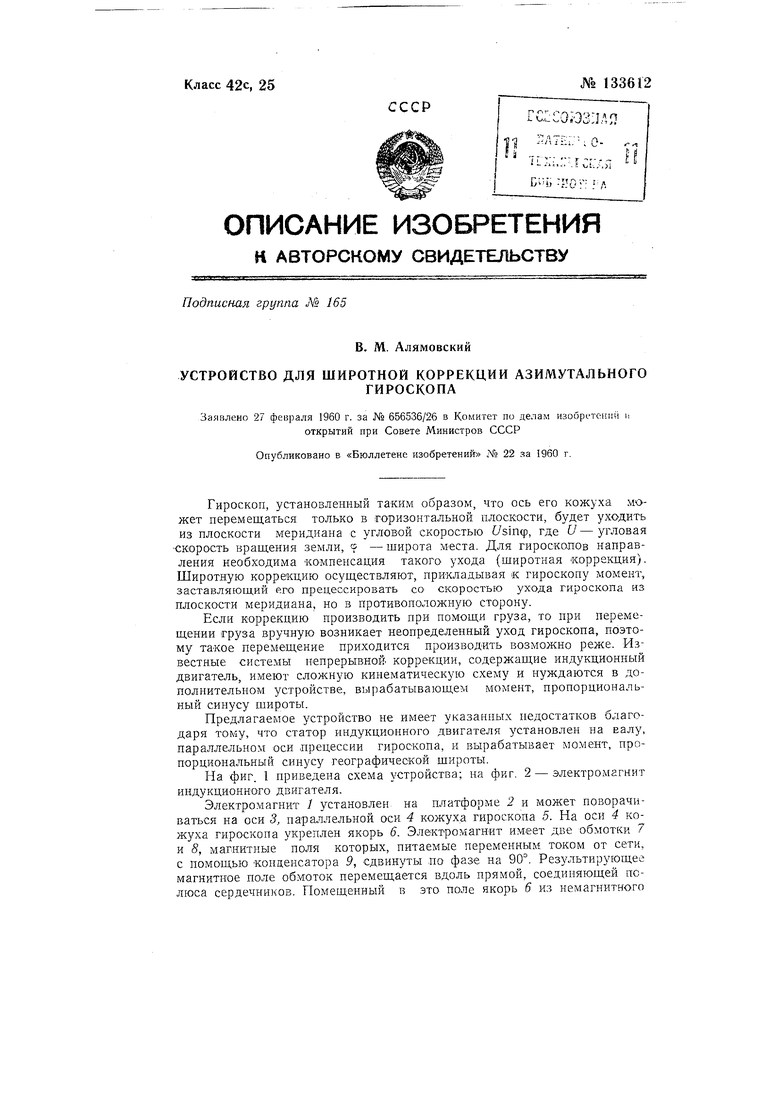
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АЗИМУТА ОСИ | 2005 |
|
RU2289787C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1972 |
|
SU355494A1 |
| Гирокомпас | 1991 |
|
SU1797690A3 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
