Изобретение относится к области навигации и может использоваться в навигационной аппаратуре наземных транспортных средств в качестве датчика направления движения. Устройства определения азимута оси широко используются в геодезии, в навигационной аппаратуре воздушных, морских и наземных транспортных средств (НТС). Вопросы быстрого и точного определения с помощью их значений азимута различных осей транспортных средств актуальны, что отражается обилием изобретений в этой области. Например, только ФГУП «ВНИИ «Сигнал» за последние годы по этой теме получил патенты №2171450, №2172473, №2166733, №2165674, №2124184 и др.
В качестве прототипа заявляемого устройства выбрана «Система самоориентирующаяся гироскопическая курсокреноуказания» по патенту РФ 2124184 [1].
Суть устройства-прототипа заключается в приводе вектора кинематического момента (ВКМ) гироскопа к направлению на Север по критерию минимума сигнала удержания ВКМ в горизонте.
Недостатком устройства-прототипа является относительно большое время определения направления на Север - время привода в меридиан, т.к. время привода в меридиан определяется максимальным углом привода, а он достигает 180°.
Изобретение направлено на уменьшение времени определения направления на Север.
Существо данного технического решения заключается в том, что после начала режима гирокомпасирования (РГК) блок определения направления привода (БОНП) определяет квадрант положения вектора кинематического момента (ВКМ) гироскопа и в случае нахождения ВКМ во 2, 3 квадрантах вырабатывает сигнал для:
- смены знака напряжения усилителя привода в меридиан;
- ввода поправки в снимаемое с датчика угла значение азимута нуля датчика.
Это обеспечивает привод ВКМ в плоскость меридиана не только к направлению на Север, а к направлению на Север или к направлению на Юг с соответствующей поправкой показаний датчика.
Сущность изобретения заключается в том, что в устройство-прототип, содержащее в интересующей нас части горизонтальную платформу (ГП), наружную (вертикальную) раму (HP), гироскопический чувствительный элемент (ГЧЭ), номинальное положение ВКМ гироскопа которого - горизонтальное, электрически последовательно соединенные первый датчик угла отклонения гироскопа от горизонта, первый усилитель привода в горизонт (и в меридиан), регулятор сигнала и первый задатчик момента прецессии вокруг горизонтальной оси ГЧЭ; электрически последовательно соединенные второй датчик отклонения гироскопа в горизонтальной плоскости, второй усилитель и второй задатчик момента вращения внутренней рамы (ВР) вокруг вертикальной оси; переключатель, блок сигнала коррекции, сумматор, третий задатчик момента прецессии гироскопа вокруг вертикальной оси ГЧЭ и датчик угла; при этом вход переключателя соединен с выходом первого усилителя привода в горизонт (и к меридиану), выход блока сигнала коррекции соединен с первым входом сумматора, выход которого соединен с входом третьего задатчика момента прецессии гироскопа вокруг вертикальной оси ГЧЭ (в горизонте); введены блок определения направления привода (БОНП), инвертор сигнала (ИС), блок ввода поправки (БВП), при этом вторые управляющие входы регулятора сигнала, переключателя и БОНП соединены с внешним источником команды о начале режима гирокомпасирования (на чертеже не показан), второй вход БОНП и первый вход БВП соединены с выходом датчика угла, выход БОНП соединен с управляющими входами инвертора сигнала и БВП, сигнальный вход инвертора сигнала соединен с выходом переключателя, а выход - со вторым входом сумматора, а выход БВП является выходом устройства по величине азимута.
Сущность изобретения поясняется блок-схемой заявленного устройства, изображенного на чертеже.
Заявленное «Устройство определения азимута оси» включает в свой состав горизонтальную платформу (ГП)1, наружную (вертикальную) раму (НР)2 карданового подвеса, гироскопический чувствительный элемент (ГЧЭ)3, номинальное положение ВКМ гироскопа которого - горизонтальное, электрически последовательно соединенные первый датчик отклонения гироскопа от горизонта 4, первый усилитель привода в горизонт (и в меридиан) 5, первый вход регулятора сигнала 6 и первый задатчик момента прецессии вокруг горизонтальной оси ГЧЭ 7; электрически последовательно соединенные второй датчик отклонения гироскопа в горизонтальной плоскости 8, второй усилитель 9 и второй задатчик момента вращения внутренней рамы (ВР) вокруг вертикальной оси 10; переключатель 11, блок сигнала коррекции 12, сумматор 13, третий задатчик момента прецессии гироскопа вокруг вертикальной оси ГЧЭ 14 и датчик угла 18; при этом первый вход переключателя 11 соединен с выходом первого усилителя привода в горизонт (и к меридиану) 5, выход блока сигнала коррекции 12 соединен с первым входом сумматора 13, выход которого соединен с входом третьего задатчика момента прецессии гироскопа вокруг вертикальной оси ГЧЭ (в горизонте) 14; введены блок определения направления привода (БОНП) 15, инвертор сигнала (ИС) 16, блок ввода поправки (ВВП) 17, при этом вторые входы регулятора сигнала 6 и переключателя 11 и первый вход БОНП 15 соединены с внешним источником команды о начале режима гирокомпасирования (на чертеже не показан), второй вход БОНП 15 и первый вход БВП 17 соединены с выходом датчика угла 18, выход БОНП 15 соединен с первым входом инвертора сигнала 16 и вторым входом БВП 17, второй вход инвертора сигнала 16 соединен с выходом переключателя 11, а выход - со вторым входом сумматора 13, а выход БВП 17 является выходом устройства по величине азимута.
В настоящее время датчик угла 18 реализуется с цифровым выходом, поэтому и БОНП 15, и БВП 17 реализуются тоже на цифровой технике. Поскольку привод осуществляется за счет прецессии гироскопа вокруг вертикальной оси, задаваемой сигналом системы удержания оси горизонта в горизонте, пропорциональным ω3cosϕ sinA, то скорость прецессии пропорциональна этому сигналу. Прецессия идет от больших значений угла между  и ВКМ к нулю по кратчайшему пути. Поэтому БОНП 15 должен определить за заданный отрезок времени знак изменения сигнала и при росте сигнала выработать выходной сигнал о реверсе направления и о введении поправки в угол. Поэтому БОНП 15 реализует следующий алгоритм:
и ВКМ к нулю по кратчайшему пути. Поэтому БОНП 15 должен определить за заданный отрезок времени знак изменения сигнала и при росте сигнала выработать выходной сигнал о реверсе направления и о введении поправки в угол. Поэтому БОНП 15 реализует следующий алгоритм:  , а БВП 17: А=Аdϕ+180° при
, а БВП 17: А=Аdϕ+180° при  .
.
Отсюда следует, что БВП представляет собой цифровое устройство сложения, а БОНП - устройство вычитания с определением знака разницы. Элементная база, позволяющая их реализовать, представлена, например в [2], стр.49-50.
Работает заявленное устройство при неподвижном основании следующим образом.
Свободный гироскоп с номинально горизонтальным направлением ВКМ стремится сохранять направление ВКМ неизменным относительно звезд. Вращение Земли будет приводить к изменению его положения относительно Земли. Для стабилизации ВКМ в Земной системе координат необходимо приложить к гироскопу моменты, вызывающие его прецессии со скоростями ωЗГ и ωЗВ. При этом угловая скорость Земли  ,
,  и
и  , где ϕ - широта места, ωЗГ - горизонтальная составляющая ωЗ, ωЗВ - вертикальная составляющая ωЗ. Эти функции в заявляемом устройстве выполняют система компенсации ωЗВ в составе блока сигнала коррекции 12, сумматора 13, третьего задатчика момента прецессии гироскопа вокруг вертикальной оси ГЧЭ (в горизонте) 14, второго датчика отклонения гироскопа в горизонтальной плоскости 8, второго усилителя 9 и второго задатчика момента вращения ВР вокруг вертикальной оси 10 и система компенсации ωЗГ в составе первого датчика угла отклонения гироскопа от горизонта 4, первого усилителя привода в горизонт (и в меридиан) 5, регулятора сигнала 6 и первого задатчика момента прецессии вокруг горизонтальной оси ГЧЭ 7. Обе системы удерживают ВКМ в постоянном положении относительно Земли. Остаточная негоризонтальность ВКМ зависит от синуса угла между ВКМ и и от усиления в цепи системы удержания (коррекции, регулировки, подстройки и т.п.). Если уменьшить сигнал на выход усилителя 5 и направить его дополнительно в задатчик момента прецессии гироскопа вокруг вертикальной оси 14, то можно образовать третью систему автоматического управления, приводящую и удерживающую ВКМ в плоскости меридиана. Для этого подаются соответствующие сигналы на регулятор сигнала 6 и на переключатель 11, после чего сумма сигналов о вращении с ωЗВ и о горизонтальном рассогласовании поступает в задатчик момента 14, в результате чего ВКМ будет приводиться к направлению на Север. Понятно, что при изменении полярности сигнала с переключателя 11 ВКМ будет приводиться к направлению на Юг.
, где ϕ - широта места, ωЗГ - горизонтальная составляющая ωЗ, ωЗВ - вертикальная составляющая ωЗ. Эти функции в заявляемом устройстве выполняют система компенсации ωЗВ в составе блока сигнала коррекции 12, сумматора 13, третьего задатчика момента прецессии гироскопа вокруг вертикальной оси ГЧЭ (в горизонте) 14, второго датчика отклонения гироскопа в горизонтальной плоскости 8, второго усилителя 9 и второго задатчика момента вращения ВР вокруг вертикальной оси 10 и система компенсации ωЗГ в составе первого датчика угла отклонения гироскопа от горизонта 4, первого усилителя привода в горизонт (и в меридиан) 5, регулятора сигнала 6 и первого задатчика момента прецессии вокруг горизонтальной оси ГЧЭ 7. Обе системы удерживают ВКМ в постоянном положении относительно Земли. Остаточная негоризонтальность ВКМ зависит от синуса угла между ВКМ и и от усиления в цепи системы удержания (коррекции, регулировки, подстройки и т.п.). Если уменьшить сигнал на выход усилителя 5 и направить его дополнительно в задатчик момента прецессии гироскопа вокруг вертикальной оси 14, то можно образовать третью систему автоматического управления, приводящую и удерживающую ВКМ в плоскости меридиана. Для этого подаются соответствующие сигналы на регулятор сигнала 6 и на переключатель 11, после чего сумма сигналов о вращении с ωЗВ и о горизонтальном рассогласовании поступает в задатчик момента 14, в результате чего ВКМ будет приводиться к направлению на Север. Понятно, что при изменении полярности сигнала с переключателя 11 ВКМ будет приводиться к направлению на Юг.
Это свойство привода ВКМ в горизонт использовано в заявленном изобретении.
При подаче извне на включенное устройство, конкретно на вход переключателя 11, БОНП 15, регулятора сигнала 6, устройство переходит в режим гирокомпасирования. На время действия этого сигнала регулятор сигнала 6 уменьшает сигнал, поступающий на задатчик момента прецессии по вертикали 7, что увеличивает отклонение ВКМ от горизонта, а переключатель 11 подает сигнал усилителя привода в горизонт 5 через сумматор 13 на задатчик момента прецессии по горизонтали 14, куда всегда поступает сигнал с блока сигнала коррекции 12, заставляющий всегда разворачиваться ГЧЭ с  (наличие последнего сигнала обеспечивает неизменность взаимного положения ГЧЭ и НР2 в режиме хранения направления меридиана). БОНП 15 по этому сигналу определяет вторую производную изменения сигнала с датчика угла А (сигнала с датчика угла 18). Поскольку привод осуществляется за счет прецессии, то сигнал в блоке сигнала коррекции 12 изменяется как
(наличие последнего сигнала обеспечивает неизменность взаимного положения ГЧЭ и НР2 в режиме хранения направления меридиана). БОНП 15 по этому сигналу определяет вторую производную изменения сигнала с датчика угла А (сигнала с датчика угла 18). Поскольку привод осуществляется за счет прецессии, то сигнал в блоке сигнала коррекции 12 изменяется как  , скорость изменения угла изменяется как Δ'˜sinΔ, a Δ''˜cosΔ.
, скорость изменения угла изменяется как Δ'˜sinΔ, a Δ''˜cosΔ.
Это позволяет по знаку Δ'' определить квадрант первоначального положения ВКМ и осуществить привод ВКМ к направлению на Юг, а направление на Север получить добавлением 180° к показаниям датчика угла 18, что позволит еще в 2 раза уменьшить время привода (время компасирования).
С данного момента устройство обеспечивает навигационную аппаратуру сигналом об азимуте нуля датчика угла 18 при всех изменениях положения НТС.
Данное устройство обеспечивает адаптивный режим привода (на Север или на Юг - куда ближе), что минимум в два раза сокращает время гирокомпасирования и особенно удобно при определении промежуточных точек трассы при маршрутах, расположенных один за другим.
Источники информации
1. Патент РФ 2124184.
2. Цифровые радиоприемные системы (справочник) под ред. Жодзинского, Москва: Радио и связь, 1990 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2019 |
|
RU2737383C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
Изобретение относится к области навигации наземных транспортных средств. Сущность изобретения заключается в том, что после начала режима гирокомпасирования блок определения направления привода определяет квадрант положения вектора кинетического момента гироскопа (ВКМ) и в случае нахождения ВКМ во 2,3 квадрантах вырабатывает сигнал для смены знака напряжения усилителя привода в меридиан и ввода поправки в снимаемое с датчика угла значение азимута нуля датчика. Техническим результатом является уменьшение времени определения направления на Север. 1 ил.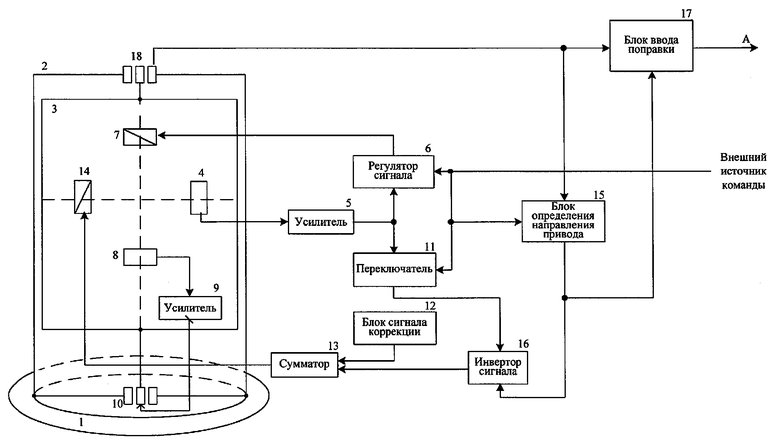
Устройство определения азимута оси, включающее в свой состав горизонтальную платформу, наружную раму карданового подвеса, гироскопический чувствительный элемент, номинальное положение вектора кинетического момента гироскопа которого - горизонтальное, электрически последовательно соединенные первый датчик угла отклонения гироскопа от горизонта, первый усилитель привода в горизонт, регулятор сигнала и первый задатчик момента прецессии вокруг горизонтальной оси; электрически последовательно соединенные второй датчик отклонения гироскопа в горизонтальной плоскости, второй усилитель и второй задатчик момента вращения внутренней рамы вокруг вертикальной оси; переключатель, блок сигнала коррекции, сумматор, третий задатчик момента прецессии гироскопа вокруг вертикальной оси и датчик угла; при этом вход переключателя соединен с выходом первого усилителя привода в горизонт, выход блока сигнала коррекции соединен с первым входом сумматора, выход которого соединен с входом третьего задатчика момента прецессии гироскопа вокруг вертикальной оси; отличающееся тем, что в него введены блок определения направления привода, инвертор сигнала, блок ввода поправки, при этом вторые управляющие входы регулятора сигнала, переключателя и блока определения направления привода соединены с внешним источником команды о начале режима гирокомпасирования, второй вход блока определения направления привода и первый вход блока ввода поправки соединены с выходом датчика угла, выход блока определения направления привода соединен с управляющими входами инвертора сигнала и блока ввода поправки, сигнальный вход инвертора сигнала соединен с выходом переключателя, а выход - со вторым входом сумматора, выход блока ввода поправки является выходом устройства по величине азимута.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА В СИСТЕМАХ НАВИГАЦИИ, ТОПОПРИВЯЗКИ, НАВЕДЕНИЯ И ПРИЦЕЛИВАНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2184936C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| US 4442723 A, 17.04.1984 | |||
| US 4807138 A, 21.02.1989 | |||
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЖИДКОСТИ ПРИ ГИСТЕРОСКОПИЧЕСКИХ ХИРУРГИЧЕСКИХ ВМЕШАТЕЛЬСТВАХ (ВАРИАНТЫ) | 1995 |
|
RU2124372C1 |

