Известны установки с несколькими гидравлическими силовозбудителями, управляемые от программ«ых устройств. Недостатком таких устройств является сложность узла регулирования усилия.
В описываемом автомате этот недостаток устраиен применением щелевого дросселя с электроприводом, перИодически работающим в .режиме перерегулирования.
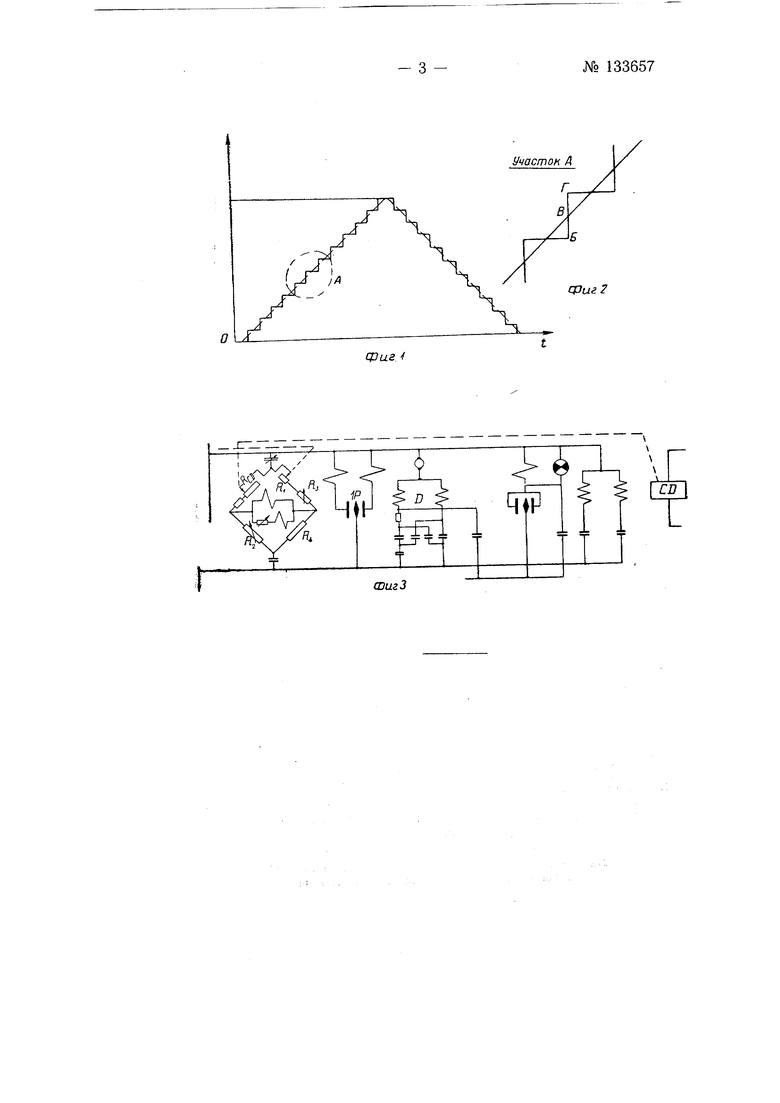
Автомат предназначен для -синхронного нагружения элементов конструкций гидравлическим.и силовозбудителя-ми. Группа силовозбудителей п-итается через щелевые дроссели от общей гидравлической магистрали, давление в которой остается постоянным в процессе нагрузки или разгрузки. Электропривод щелевого дросселя работает в импульсном режиме, благодаря чему график нагружения и разгружения имеет ступенчатый характер.
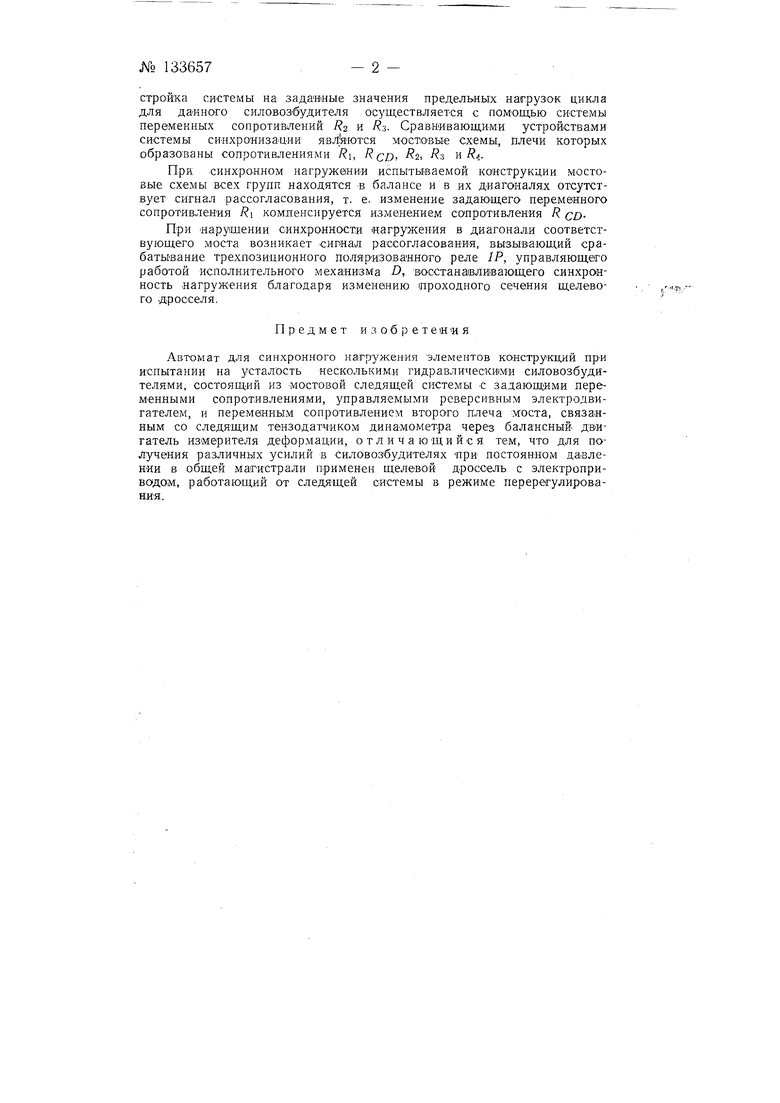
На фиг. 1 изображен график нагружения и разгружения; на фиг. 2 - участок Л графика на фит. 1; на фиг. 3-электрическая схема системы синхронизации автомата.
Точка Б графика соответствует началу регулирования; точка В, расположенная в средней части ступени, - достижению синхронной скорости нагружения, участок ВГ соответствует режиму перерегулИрования. Так как система периодически работает в режиме перерегулирования, то конец каждой ступени сопровождается закрытием дросселя, благодаря чему отпадает необходимость в редуцировании давления для каждого силовозбудителя.
Задающим элементом является переменное сопротивление Ri, явижок которого перемещается с определенной скоростью от реверсивного электродвигателя, скорость вращения которого определяет скорость нагружения конструкции. ТензодатчИК динамометра через балансный двигатель CD воздействует на переменного сопротивления RcD выполняющий функции элемента обратной связи. На№ 133657- 2 стройка системы на заданные значения предельных нагрузок цикла для данного силовозбудителя осуществляется с помощью системы переменных сопротивлений и Rs- Сравнивающими устройствами системы сИНХрониза|Ц«и являются МОСТОБЬЮ схемы, плечи которых образованы сопротивлениями Ri, RCD 2, Rs Ri.
При синхронном нагружании испытываемой конструкции мостовые схемы всех групп находятся в балансе ив их диагоналях отсутствует сигнал рассогласования, т. е. изменение задающего переменного сопротивления Ri компенсируется изменением сопротивления R CDПри нарушении синхронности «агружения в диагонали соответствующего моста возникает сигнал рассогласования, вызывающий срабатывание трехпозиционного поляризованного реле IP, управляющего работой исполнительного механизма D, восстанавли вающего синхронность нагружения благодаря изменению проходного сечения щелевого дросселя.
Предмет изобретения
Автомат для синхронного нагружения элементов конструкций при испытании на з сталость несколькими гидравлическими силовозбудителями, состоящий из мостовой следящей системы с задающими перем-енными сопротивлениями, управляемыми реверсивным электродвигателем, и переменным сопротивлением второго плеча моста, связанным со следящим тензодатчиком динамометра через балансный, двигатель измерителя деформации, отличающийся тем, что для получения различных усилий в силовозбудителях при постоянном давлении в общей магистрали применен щелевой дроссель с электроприводам, работающий от следящей системы в режиме перерегулирования.
Фиг 2
Фиг I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для механических испытаний сложных конструкций | 1959 |
|
SU134064A1 |
| Устройство для механических испытаний сложных конструкций | 1961 |
|
SU145381A1 |
| ВСЕСОЮЗНАЯ IПАТЕйТНО-Т?}(НИ«ЕС^{Д,я1toilbJlHC.)^ f-KA | 1972 |
|
SU359564A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ЗАКРЫЛКА САМОЛЕТА | 1966 |
|
SU183448A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2001 |
|
RU2192034C1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2004 |
|
RU2279980C1 |
| Устройство для автоматической стабилизации натяжения полосы между клетью и моталкой стана холодной прокатки | 1961 |
|
SU150467A1 |
| Машина для исследования сложного напряженного состояния трубчатых образцов материалов | 1958 |
|
SU121586A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |