Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к устройствам для измерения характеристик движения самоходных агрегатов.
Цель изобретения - повышение точности управления движением самоходного агрегата по заданной траектории
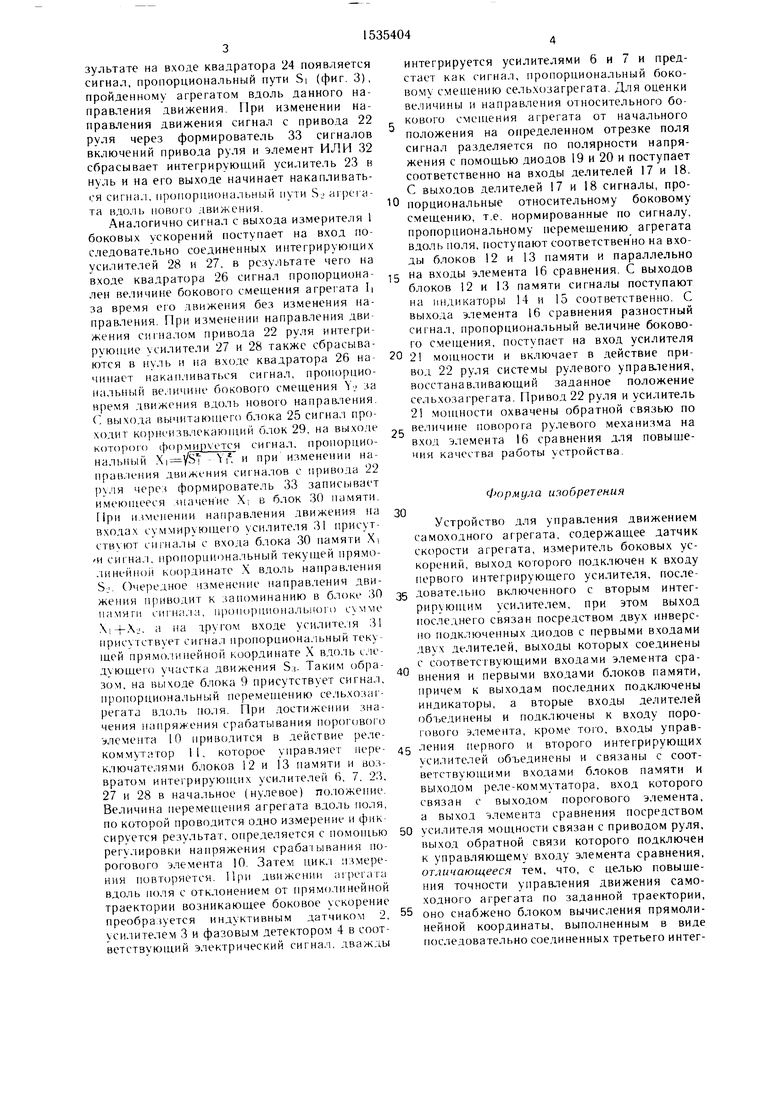
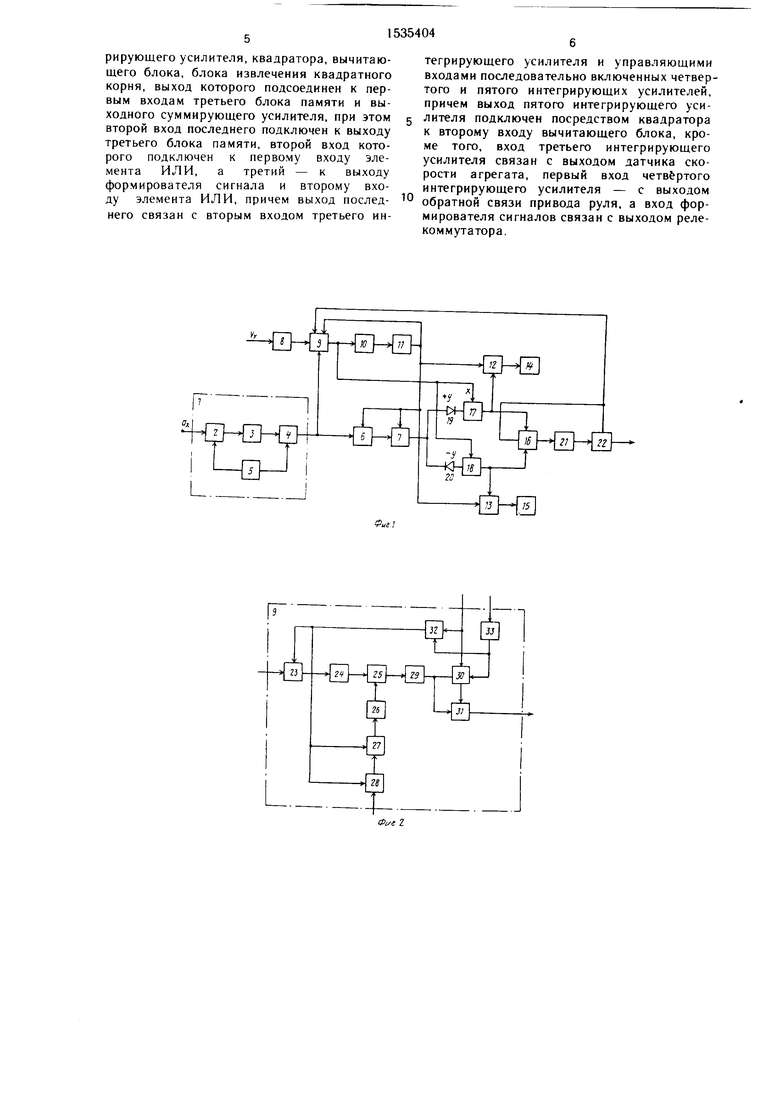
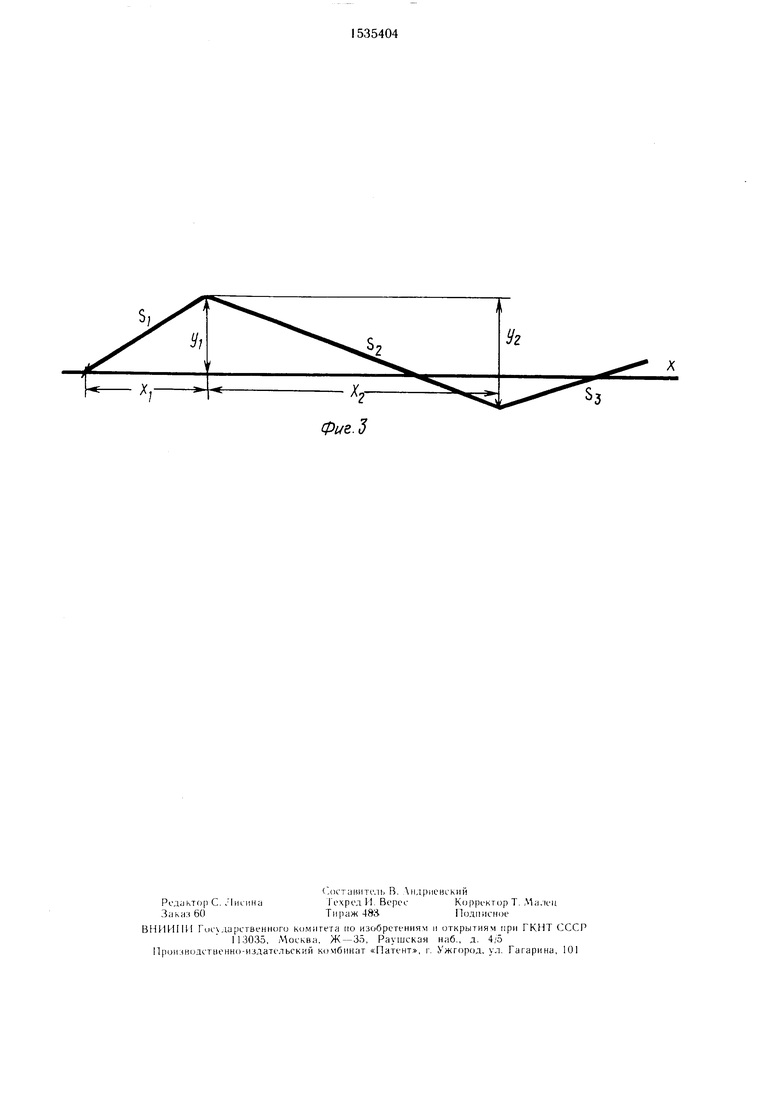
На фиг 1 показана структурная схема устройства; на фиг. 2 - структурная схема блока вычисления прямолинейной координаты; на фиг 3 - график движения самоходного агрегата.
Устройство содержит измеритель 1 боковых ускорений, состоящий из последовательно соединенных индуктивного датчика 2 ускорений, установленного на самоходном агрегате в его кинематическом центре с орие- ентировкой по направлению бокового смещения, усилителя 3, фазового детектора 4 и генератора 5, питающего датчик 2 и детектор 4. Выход измерителя 1 подключен к входу последовательно соединенных первого 6 и второго 7 интегрирующих усилителей Датчик 8 скорости агрегата включен на один из входов блока 9 вычисления прямолинейной координаты. Устройство также содержит пороговый элемент 10, реле-коммутатор 11,блоки 12 и 13 памяти.индикаторы 14 и 15, элементы 16 сравнения, делители 17 и 18, диоды 19 и 20, усилитель 21 мощности, привод 22 руля, интегрирующий усилитель 23, квадратор 24, вычитающий блок 25, квадратор 26, интегрирующие усилители 27 и 28, корнеизвлекающий блок 29, блок 30 памяти, суммирующий усилитель 31, элемент ИЛИ 32 и формирователь 33 сигналов
Устройство работает следующим образом.
Датчик 8 скорости, установленный на колесе агрегата, вырабатывает электрический сигнал, пропорциональный скорости движения агрегата вдоль направления движения (направление движения при поворотах агрегата изменяется), который поступает на интегрирхющий силитель 23 блока 9. В ресл
со
сл
4
зультате на входе квадратора 24 появляется сигнал, пропорциональный пути Si (фиг. 3), пройденному агрегатом вдоль данного направления движения При изменении направления движения сигнал с привода 22 руля через формирователь 33 сигналов включений привода руля и элемент ИЛИ 32 сбрасывает интегрирующий усилитель 23 в нуль и на его выходе начинает накапливаться сигнал, пропорциональный пути S. aipeia- та вдоль нового движения.
Аналогично сигнал с выхода измерителя 1 боковых ускорений поступает на вход последовательно соединенных интегрирующих усилителей 28 и 27, в результате чего на входе квадратора 26 сигнал пропорционален величине бокового смещения агрегата за время его движения без изменения направления При изменении направления движения сигналом привода 22 руля интегрирующие чсидители 27 и 28 также сбрасываются в и на входе квадратора 26 начинает накапливаться сигнал, пропорциональный величине бокового смещения Y. за время движения вдоль нового направления С. выхода вычитающего блока 25 сигнал проходит корноизвлекающий блок 29, на выходе которою формирчется сигнал, пропорциональный Х|-У$ Т и при изменении направления движения сигналов с привода 22 рчля чере формирователь 33 записывает имеющееся «качение X, в блок 30 памяти При изменении направления движения на входах суммирчющего силителя 31 присут- сигналы с входа блока 30 памяти И , пропорциональный текущей прямолинейной координате X вдоль направления Sj Очередное изменение направления движения приводит к упоминанию в блоке 30 памяти cm нала, пропорциональной) счмме Xi-f-X. а на входе усилителя 31 присч гствует сигнал пропорциональный тек - щей прямолинейной координате X вдоль следующею часгка движения Sf. Таким образом, на выходе блока 9 присутствует сигнал, пропорциональный перемещению сельхозн - регата вдоль поля. При достижении значения напряжения срабатывания пороговою элемента 10 приводится в действие реле- коммугагор 11, которое управляет переключателями блоков 12 и 13 памяти и возвратом интегрирующих усилителей 6, 7, 23, 27 и 28 в начальное (нулевое) положение Величина перемещения агрегата вдоль поля, по которой проводится одно измерение и фик сируется результат, определяется с помощью регулировки напряжения срабашвання порогового элемента 10 Затем цикл намерения повторяется. При движении aipeuia вдоль поля с отклонением от прямо чиненной траектории возникающее боковое ускорение преобра уется индуктивным датчиком 2, хсилителем 3 и фазовым детектором 4 в соответствующий электрический сигнал, дважды
0
интегрируется усилителями 6 и 7 и предстает как сигнал, пропорциональный боковому смещению сель.хозагрегата. Для оценки величины и направления относительного бокового смещения агрегата от начального положения на определенном отрезке поля сигнал разделяется по полярности напряжения с помощью диодов 19 и 20 и поступает соответственно на входы делителей 17 и 18. С выходов делителей 17 и 18 сигналы, пропорциональные относительному боковому смещению, т.е. нормированные по сигналу, пропорциональному перемещению агрегата вдоль поля, поступают соответственно на входы блоков 12 и 13 памяти и параллельно
на входы элемента 16 сравнения. С выходов блоков 12 и 13 памяти сигналы поступают на индикаторы 14 и 15 соответственно. С выхода элемента 16 сравнения разностный сигнал, пропорциональный величине бокового смещения, поступает на вход усилителя
0 21 мощности и включает в действие привод 22 руля системы рулевого управления, восстанавливающий заданное положение сельхозагрегата. Привод 22 руля и усилитель 21 мощности охвачены обратной связью по величине поворота рулевого механизма на вход элемента 16 сравнения для повышения качества работы устройства
5
0
5
0
5
0
5
Формула изобретения
Устройство для управления движением самоходного агрегата, содержащее датчик скорости агрегата, измеритель боковых ускорений, выход которого подключен к входу первого интегрирующего усилителя, последовательно включенного с вторым интег- рирчющим усилителем, при этом выход последнего связан посредством двух инверсно подключенных диодов с первыми входами делителей, выходы которых соединены с соответс вующими входами элемента сравнения и первыми входами блоков памяти, причем к выходам последних подключены индикаторы, а вторые входы делителей объединены и подключены к входу поро- твого элемента, кроме того, входы управления первого и второго интегрирующих усилителей объединены и связаны с соответствующими входами блоков памяти и выходом реле-коммутатора, вход которого связан с выходом порогового элемента, а выход элемента сравнения посредством усилителя мощности связан с приводом руля, выход обратной связи которого подключен к управляющему входу элемента сравнения, отличающееся тем, что, с целью повышения точности управления движения самоходного агрегата по заданной траектории, оно снабжено блоком вычисления прямолинейной координаты, выполненным в виде последовательно соединенных третьего интегрирующего усилителя, квадратора, вычитающего блока, блока извлечения квадратного корня, выход которого подсоединен к первым входам третьего блока памяти и выходного суммирующего усилителя, при этом второй вход последнего подключен к выходу третьего блока памяти, второй вход которого подключен к первому входу элемента ИЛИ, а третий - к выходу формирователя сигнала и второму входу элемента ИЛИ, причем выход последнего связан с вторым входом третьего интегрирующего усилителя и управляющими входами последовательно включенных четвертого и пятого интегрирующих усилителей, причем выход пятого интегрирующего усилителя подключен посредством квадратора к второму входу вычитающего блока, кроме того, вход третьего интегрирующего усилителя связан с выходом датчика скорости агрегата, первый вход четвёртого интегрирующего усилителя - с выходом
обратной связи привода руля, а вход формирователя сигналов связан с выходом реле- коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения боковогоСМЕщЕНия и упРАВлЕНия уСТОйчиВОСТьюдВижЕНия СЕльСКОХОзяйСТВЕННОгО Аг-РЕгАТА пО пОСТОяННОй ТРАЕКТОРии | 1979 |
|
SU832531A1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Устройство для обучения водителей транспортных средств | 1984 |
|
SU1277172A1 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Система управления электрогидравлической рулевой машиной | 1988 |
|
SU1615059A1 |
Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к устройствам для измерения характеристик движения самоходных агрегатов. Целью изобретения является повышение точности управления движением самоходного агрегата по заданной траектории. Датчик скорости агрегата вырабатывает сигнал, пропорциональный скорости движения вдоль колеи, после чего вычисляется значение пути, пройденного вдоль этого направления. Аналогично вычисляется величина сигнала о токовых смещениях. После этого сигнал с блока вычисления прямоугольной координаты дважды интегрируется и полярно разделяется. Далее осуществляется нормирование полученного сигнала относительно пройденного пути. Полученный сигнал усиливается и поступает на привод пути системы рулевого управления, охваченной обратной связью, которая повышает качество работы системы. 3 ил.
| Устройство для измерения боковогоСМЕщЕНия и упРАВлЕНия уСТОйчиВОСТьюдВижЕНия СЕльСКОХОзяйСТВЕННОгО Аг-РЕгАТА пО пОСТОяННОй ТРАЕКТОРии | 1979 |
|
SU832531A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
