Изобретение относится к области оперативного измерения грузопотока горной масс}з1, транспортируемой ленточными конвейерами, на открытых и подземных горных работах.
Целью изобретения является упрощние процесса взвешивания горной массы, упрощение конструкции устройств и повышение его надежности.
На фиг.1 представлена схема устройства для измерения грузопотока горной массы, вид вдоль направления движения грузопотока} на. фиг,2 - то же, вид в направлении, нормальном к направлению грузопотока.
Способ измерения грузопотока горной массы включает измерение амплитуды и частоты вынужденных колебани подпружиненной роликоопоры при частоте этих колебаний, пропорциональной скорости перемещения транспортирующего органа. Производительность грузопотока определяется по величинам указанной частоты и амплитуды.
Устройство, реализующее предлагаемый способ, содержит подпружиненную роликоопору 1, установленную на пружинно-гидравлические амортизаторы 2 между стационарными ролико- опорами (не показаны), центральный ролик 3 с эксцентрично расположенной осью вращения, транспортирующий орган 4, транспортируемый груз 5, электродинамический датчик 6, состоящий из магнитопровода 7 и катушки 8 индуктивности, и конвейерный став 9.
Устройство работает следующим об- .
При перемещении транспортирующего органа 4 с транспортируемым грузом 5 активный ролик 3 вращается и вызывает колебания роликоопоры 1, транспортирующего органа 4 и груза 5 Амплитуда и частота механических колебаний электродинамическим датчиком 6 преобразуются в электрический сигнал, необходимый для расчета и регистрации производительности грузопотока горной массы, транспортируемой ленточным конвейером, в соответствии ,со следующим соотношением:
. uRmi
,. UIUlli N 2f - 2
- (---;) - (5) --Р.С
-Ял1
где Q - производительность грузопотока горной массы,кг/с;
СО 0
5
uR К
т,
m
р. on Чл
коэф(жциент жесткости пру- жинно-гидравличес ког о амортизатора, Н/м; коэффициент вязкого сопротивления пружинно-гидравлического амортизатора, кг/с;
частота колебаний роликоопоры, рад,/с; амплитуда колебаний роликоопоры, м;
эксцентриситет активного ролика, м;
радиус указанного ролика, м;
масса активного ролика,кг; масса роликоопоры, кг; погонная масса транспортирующего органа, кг/м; расстояние между ролико- опорами, м.
Формула изобретения
1 , Способ измерения грузопотока горной массы, заключаюш;ийся в сообщении определенной частоты колебаний транспортирующему органу, измерении
амплитуды этих колебаний и определении грузопотока массы по величине частоты и амплитуды колебаний с учетом величины жесткости упругих связей и массы транспортирующего органа, отличающийся тем, что, с целью упрощения процесса измерения, .колебания транспортирующему органу сообщают посредством одного из его роликов, причем величину, частоты устанавливают пропорционально скорости перемещения транспортиующего органа, а производительность грузопотока массы определяют в соответствии со .-Следующим соотношением: „ UR Г К I /uRm,-., ,Ъ.,
Y о-г-(-у;- ) -(й - Р.оп
де Q - производительность грузопотока горной массы,, кг/с; К - коэффициент жесткости пружинно-гидравлическогоамортизатора, Н/м} Ъ - коэффициент вязкого сопротивления пружинно-гидрав- лического амортизатора,
кг/с;
со - частота колебаний, сообща- емая одному из опорных роликов, рад/с;
3 .13394
у - амплитуда колебаний всей
роликоопоры, м;
uR - величина эксцентриситета указанного опорного ролика, м;
т. - масса опорного ролика,кг; q - погонная масса транспортирующего органа, кг/м; 1 - расстояние между ропикоопорами, м;
Гор on - масса всей роликоопоры,кг; R - радиус указанного ролика,м.
2. Устройство для измерения грузо- 15 отока горной массы, содержащее поающий транспортирующий орган, дат10
9
чик перемещений транспортирующего ор гана и возбудитель колебаний, отличающееся тем, что подающий транспортирующий орган выполнен в виде ленточного конвейера, одна из роликоопор которого установлена на пружинно-гидравлических амортизаторах, возбудитель колебаний выполнен в виде ролика в указанной роликоопоре с эксцентричным расположением его оси вращения относительно рабочей ципиндри- ческой поверхности, причем эксцент- ричньй ролик расположен в центре роликоопоры, а датчик перемещений,- между роликоопорой и основанием, на котором установлены амортизаторы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления ленточным конвейером | 1986 |
|
SU1442480A1 |
| Способ транспортирования грузов многосекционным вибрационным конвейером | 1989 |
|
SU1722986A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2010 |
|
RU2457165C1 |
| Загрузочное устройство конвейера | 1990 |
|
SU1773821A1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 1999 |
|
RU2149815C1 |
| Ленточный конвейер | 1989 |
|
SU1728090A1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1994 |
|
RU2078723C1 |
| Крутонаклонный ленточный конвейер | 1980 |
|
SU906831A1 |
| Роликоопора ленточного конвейера | 1982 |
|
SU1102737A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА, ТРАНСПОРТИРУЕМОГО КОНВЕЙЕРОМ | 2024 |
|
RU2829033C1 |
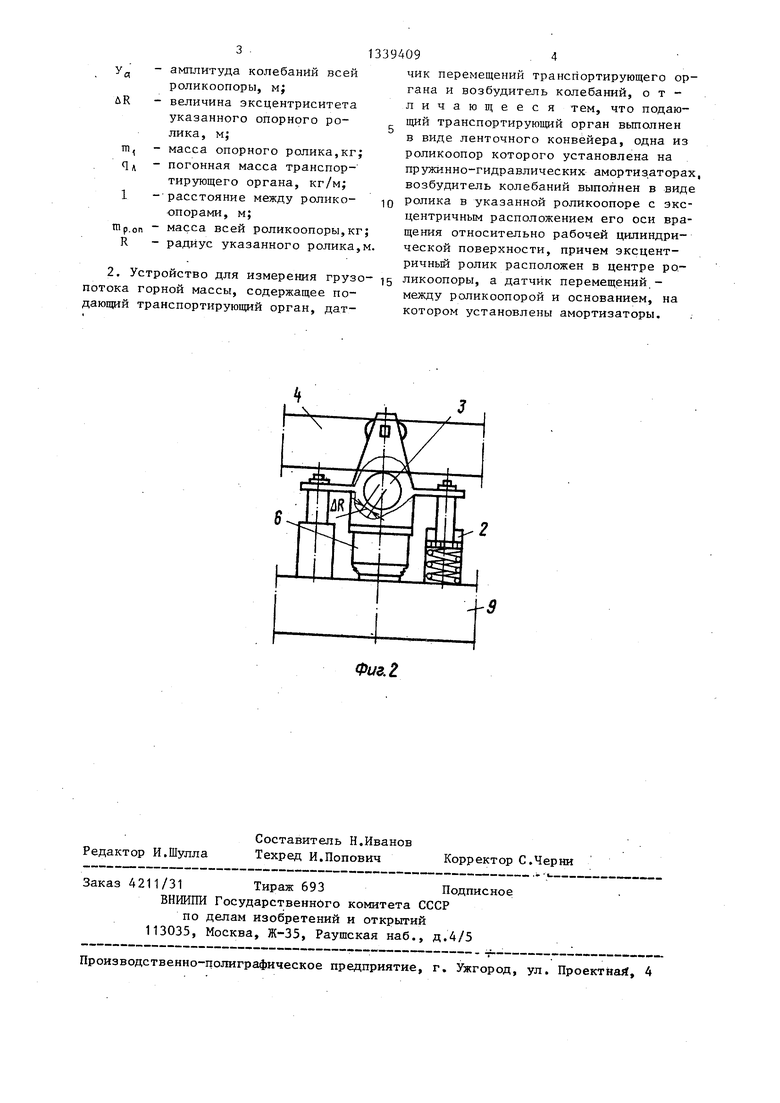
Изобретение относится к измерительной технике и может быть использовано при проведении открытых и подземных горных работ. Цепь изобретения - упрощение процесса измерения грузопотока горной массы при транспортировании ее ленточньм конвейером. При перемещении ленты 4 с грузом 5 ей сообщаются колебания посредством центрального ролика 3 с эксцентрично расположенной осью вращения. Частота колебания выбирается пропорционально скорости перемещения ленты. Электродинамический датчик перемеще-г НИИ, состоящий из магнитопровода 7 и катушки 8 индуктивности, преобразует колебания роликоопоры 1 в электрический сигнал. Роликоопора 1 установлена на пружинно-гидравлических тизаторах 2. 2 с.п. ф-лы, 2 ил. t СО со (Г) 4 о Фиг.1
Редактор И.Шулла
Составитель Н.Иванов Техред И.Попович
/011/41Типаж 693Подписное
Заказ 4211/31хираж оз-з
ВНИИПИ Государственнйго комитета LLor
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,. д.4/5
П ойзводГт ённо-по гр йчГскоГпрёдпрняти Ужгород, ул. проектная. 4
Фиг.2
Корректор С. Ч ер ни
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
