Изобретение относится к средствам управления ленточными конвейерами, транспортирующими горную массу с крупными кусками, преимущественно на роторных комплексах при транспортировании вскрьпли.
Целью изобретения является повышение надежности работы конвейера за счет снижения ударных нагрузок на роликоопоры при попадании крупных кус- ков,
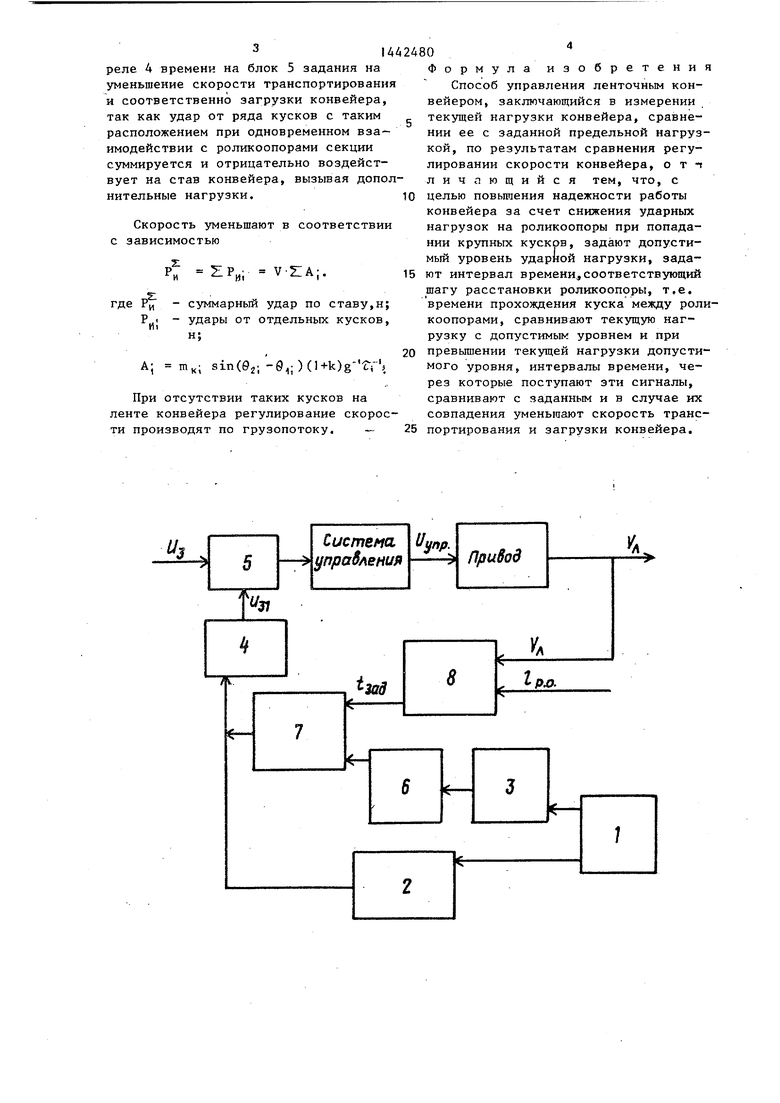
На чертеже изображена блок-схема .реализующая предлагаемый способ.
Подсистема включает датчик I ударов , соединенный с двумя разноуровневыми компараторами 2 и 3.Компаратор 2 соединен через реле 4 времени с блоком 5 задания. Компаратор 3 через счетчик 6 времени соединен с вторым входом логического блока 7, первый вход которого соединен с делителем 8. Логический блок 7 также через реле 4 времени соединен с блоком 5 задания.
При транспортировании ленточным конвейером крупнокусковой горной массы датчик 1 ударов 5 установленный на роликоопоре вблизи места загрузки, воспринимает и регистрирует ударные нагрузки от грузопотока, которые представляют непрерьтный ряд импульсов различной амплитуды. Амплитуда ударных импульсов зависит от массы транспортируемых кусков. На конвейерах определенного назначения транспортируют горную массу соответствующей крупности. При этом известен средний и предельный (допустимый) размер и вес транспортируемых кусков . Определив по формуле
т V sin (0j,-0,) (l+k)g r-
где m - масса куска, кг; величину импульсного удара по конструкции от среднего и предельного кусков и зная соответствующую им амплитуду импульсов, судим о величине проходящего над роликоопорой куска. При попадании на конвейер очень крупного куска груза, что бывает при работе роторного экскаватора Б зимнее и весенне-осеннее время (смерзание, слипание), амплитуда ударного импульса при взаимодействии куска с роликоопорой превышает предельный уровень. Сигналы с датчика 1
g
5
0
5
0
5
0
поступают на компараторы 2 и 3, один из которых 2 срабатывает при поступлении сигнала с амплитудой, превышающей предельный уровень нагрузки, другой 3 - при поступлении сигнала, превьщгающего по амплитуде допустимый уровень нагрузки. При срабатьгеа- нии компаратора 2 на блок 5 задания через реле 4 времени поступает сигнал на уменьшение скорости транспортирования и загрузки конвейера. Уровень снижения скорости заложен в задающем устройстве 5 в соответствии с зависимостью
Р„ (l+k) sin(, )g- tгде Р - величина импульсного удара, Н (ей соответствует импульс определенной амплитуды); V - скорость транспортирования,
м/с;
PZ.I углы между куском и роликом;
g - ускорение свободного падения,
с - время взаимодействия куска с роликоопорой, с.
Причем реле 4 времени устанавливает время действия сигнала, соответствующее времени прохождения куска по ставу конвейера. При срабатывании компаратора 3 сигналы через счетчик 6 времени поступают на логический блок 7, где время, через которое поступают сигналы, сравнивается с заданным временем t ,соответст - вующим времени прохождения куска между роликоопорами (т.е.шагу расстановки роликоопор)
45
V/lp,o .с.
где 1„д - расстояние между роликоопорами.
При прохождении одиночного куска, амплитуда ударного импульса которого превьшгает допустимый, логический блок 7 не срабатьшает.
При поступлении на логический блок 7 п (,3,...,п) сигналов с шагом следования, соизмеримым с шагом расстановки роликоопор, логический блок 7 срабатывает и подает сигнал черед
реле 4 времени на блок 5 задания на уменьшение скорости транспортирования и соответственно загрузки конвейера, так как удар от ряда кусков с таким расположением при одновременном взаимодействии с роликоопорами секции суммируется и отрицательно воздействует на став конвейера, вызывая дополнительные нагрузки.
Скорость уменьшают в соответствии с зависимостью
SP
И1
V-ГА;
где РИ - суммарный удар по ставу,н; - удары от отдельных кусков, н;
А; sin(02;-9ii)(l+k)
При отсутствии таких кусков на ленте конвейера регулирование скоросФормула изобретения
Способ управления ленточным конвейером, заключающийся в измерении текущей нагрузки конвейера, сравнении ее с заданной предельной нагрузкой, по результатам сравнения регулировании скорости конвейера, о т i личпющийся тем, что, с
целью повышения надежности работы конвейера за счет снижения ударных нагрузок на роликоопоры при попадании крупных кусков, задают допустимый уровень ударной нагрузки, задают интервал времени,соответствующий шагу расстановки роликоопрры, т.е. времени прохождения куска между роликоопорами, сравнивают текущую нагрузку с допустимым уровнем и при
превышении текущей нагрузки допустимого уровня, интервалы времени, через которые поступают зти сигналы, сравнивают с заданным и в случае их совпадения уменьшают скорость транс
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения технического состояния роликоопор ленточного конвейера | 1989 |
|
SU1710463A1 |
| Устройство для предохранения опорных металлоконструкций конвейера от перегрузки | 1986 |
|
SU1419962A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЩЕКОВОЙДРОБИЛКИ | 1972 |
|
SU335001A1 |
| Способ определения наличия неисправных роликов ленточного конвейера и их местоположения | 1990 |
|
SU1770130A1 |
| Ленточный конвейер | 1989 |
|
SU1728090A1 |
| Способ мониторинга состояния ленточного конвейера с модулем камеры искробезопасной машинного зрения и тепловизора | 2023 |
|
RU2803042C1 |
| Устройство для поддержания ленты конвейера в месте ее загрузки | 1983 |
|
SU1224223A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПЛАВНОСТИ ХОДА ГУСЕНИЧНЫХ МАШИН ПРИ ОБУЧЕНИИ ВОЖДЕНИЮ | 1997 |
|
RU2113015C1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
Изобретение относится к транспортировке горной массы. Цель - повьппение надежности конвейера в работе за счет снижения ударных нагрузок на роликоопоры при попадании крупных кусков. Для этого задают допустимый уровень ударной нагрузки. Задают интервал времени, соответствующий шагу расстановки роликоопоры, т.е. времени прохождения куска между роликоопорами. Сравнивают текущую нагрузку с допустимь1м уровнем и при повышении текущей нагрузки допустимого уровня определяют интервалы времени, через которые поступают эти сигналы. Интервалы времени сравнивают с заданными и в случае их совпадения уменьшают скорость транспортирования и загрузки конвейера. При отсутствии крупных кусков на ленте конвейера скорость ее передвижения регулируют по грузоцото- ку. 1 ил. SS СЛ
ти производят по грузопотоку.
и
Система упраВлени
- 25 портирования и загрузки конвейера.
и,
упр
Прибод
зад
8
PJ).
4
| Гаврилов П.Д.,.Гимельштейн Л.Я., Медведев А.Е | |||
| Автоматизация производственных процессов | |||
| М,; Недра, 1985, с.108-109 | |||
| Способ управления ленточным конвейером | 1984 |
|
SU1154173A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
