Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока цик- .лического действия.
Целью изобретения является снижение потерь энергии в электрвириводе.
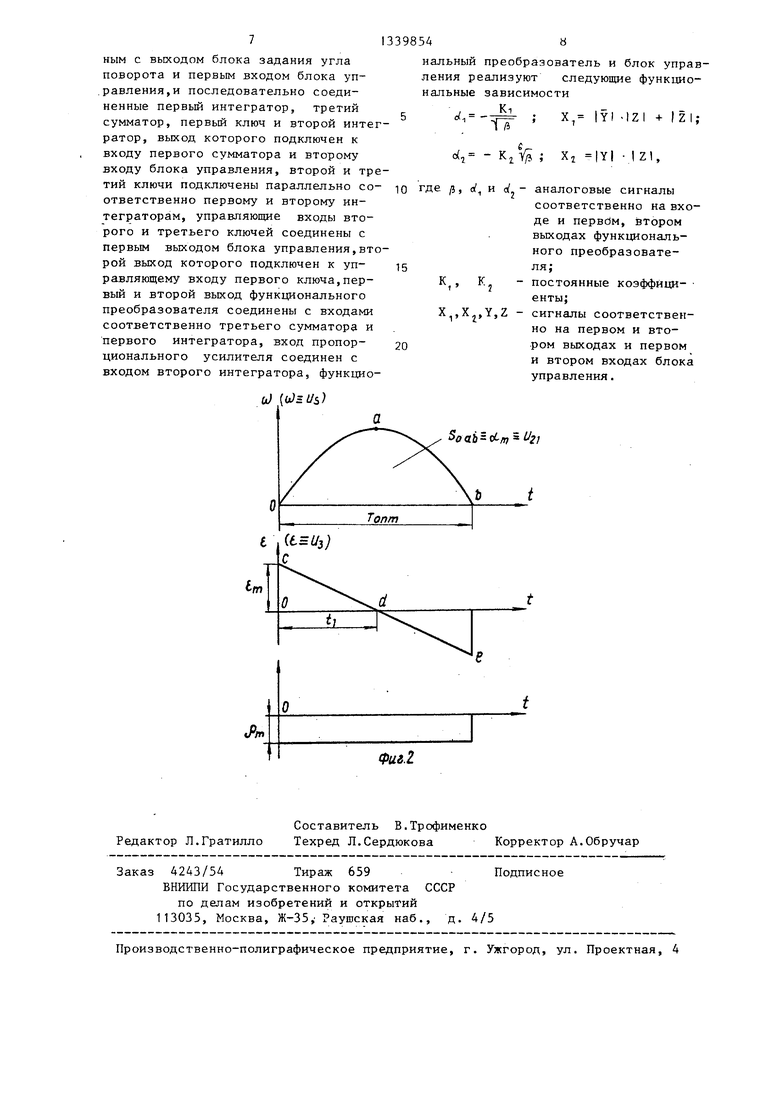
На фиг. 1 дана структурная схема электропривода с оптимальным управлением; на фиг. 2 - диаграммы скорости, ускорения, рывка, где Ui - напряжение на п-выходе i-блока.
Электропривод с оптимальным управлением содержит электродвигатель 1 постоянного тока, подключенный к блоку 2 регулирования напряжения, и последовательно соединенные первый сумматор 3, регулятор 4 частоты вращения,второй сумматор 5 и регулятор 6 тока, выход которого подключен к входу блока 2 регулирования напряжения, датчики 7 и 8 частоты вращения и тока, входы которых подключены к входам соответственно первого 3 и второго 5 сумматоров, пропорциональный усилитель 9, соединенный с входом второго сумматора 5, три ключа 10 - 12, блок 13 управления с двумя входами и двумя выходами,функцио- нальньй преобразователь 14 с двумя выходами и входом, соединенным с первым входом блока 13 управления, и последовательно соединенные первьм интегратор 15, третий сумматор 16, первьш ключ 10 и второй интегратор 17, выход которого подключен к входу первого сумматора 3 и второму входу 15 блока 13 управления, параллельно первому 15 и второму 17 интеграторам подключены соответственно второй и третий 12 ключи, управляющие вхо- .ды которых соединены с первым выходом блока 13 управления,второй выход которого подключен к управляющему входу первого ключа 10, первый и второй выходы функционального преобра- . зователя 14 соединены с входами соответственно третьего сумматора 16 и первого интегратора 15,вход пропорционального усилителя 9 соединен с входом второго интегратора 17.Вход функционального преобразователя 14 соединен также с блоком 18 задания угла поворота.
Электропривод работает следующим образом.
Для обеспечения оптимального управления по минимуму потерь электрической энергии электропривода при
различньгх значениях угла поворота (или пути перемещения рабочего органа)
электродвигателя 1 определяется оптимальное время Т цикла при заданных максимальных значениях, ускорения gf и рывка р . На вход устройства (клемма 18) подается напряжение Ug(, пропорциональное углу поворота электродвигателя 1 ( и/ ). Обработка заданного угла
Сл Гг
поворота вала двигателя d производится при определенных значениях ускорения Ё и рывка р„. Напряжения, пропорциональные величинам 8 и Р|, формируются на выходе функционального преобразователя 14
и,
J f fn Р Текуш,ее значение ускорения изменяется по прямой 20 cde, - р t (фиг. 2). Напряжение, пропорциональное ускорению , формируется на выходе сумматора 16 с характеристикой U и,ф - - - Upt. Интегратор 15 име25 ет характеристику U и„
t
Up t. Угловая скорость электродвигателя 1 определяется как
и
dt („- ) dt.
Напряжение,пропорциональное угловой скорости, формируется на вьйоде интегратора 17 с .передаточной функцией
: и„ u,g. t ( ) t
и подается на регулятор 4 частоты вращения с сумматора 3 с характеристикой Uj и , - и.
Коэффициент передачи датчика 7 частоты вращения
40
К.
Ul«c
5
U)
MCtK t
скорости теля 1 Угол поворота
S(m- fmt) tdt,
тогда
t t3
d i -T--Pm0
вала электродвига- / Jwdt
Угловая скорость u) ется по кривой oab (фиг. болическими. участками оа
Ul7
2) и ab, а
изменя- с параплощадь, ограниченная кривой оаЪ, равна углу поворота d ,
В момент времени t угол поворота
ol
d
il
f
m
ЗР
fn,
Vi75p,,
следовательно,
-ri
Ускорение „ связано с динамической составляющей тока 1л электродвигателя 1 соотношением I „ с 1, где I - приведенный момент инерции
электропривода;
С - постоянный коэффициент для принятого электродвигателя. При коэффициенте обратной связи по току
К.
и
I маис
и
1« а КС
-максимальное напряжение на выходе датчика тока при максимальном значении тока электродвигателя;
-максимальный ток электродвигателя .
Uq И.равно напEm IK.
выходе сумматора 16, U
- напряжение на выходе усисоответствующее заданному электропривода, пропорциоамическому току
и, и,
1Кт
Е.-КЗ и,, к,.
коэффициент переда-г чи пропорционального усилителя 9.
подается на регулясумматор 5 с харак
и.
и
4 + Uj - и,
в точке а (фиг. 2) величина угловой скорости .0) имеет максимальТрпт оптимальное значение времени периода;
MC - момент статической нагрузки электропривода;
I - ток электродвигателя.
de-„ „ dl, .
ак как
dt
С
dt dt
Pm следовательно,
С 12
Р -
тJ
I с/г
12а р
ХЭ
епт
Подставляя выражение для Т 2 М
опт
,
получим р„ - -у f6
Используя последнее вьфажение, величина ускорения определится как
- ifm
у 2 1
Y6
25
Напряжение на втором выходе функционального преобразователя 14 формируется по выражению
и.
fm I V6
на первом
5
0
5
0
0
и.
-т
Мс
,-v
,
em t 2 i
Так как величины приведенного момента инерции I и момента статического Mj. являются постоянными для конкретного электропривода, то напряжения Un и и с„ на выходе функ/ Ш 1Г1
ционального преобразователя 14 изменяются только в зависимости от значения заданного угла поворота, т.е. напряжение l d Отключение электропривода в конце цикла (точка b на фиг. 2) производится ключом 10, который, размыкаясь, разрьшает связь сумматора 16 и интегратора 17, Замыкаются ключи 11 и 12, которые закорачивают выходы и входы интеграторов 15 и 1,7, и сигнал зада-, ния скорости электропривода становится равным нулю.
Ключ 10 име.ет характеристику
2
и
16
при
1;
О
при
0.
55
Аналогичные характеристики имеют ключи 12 и 11
где Т
опт
,ГбТ7
V м.
и
10
при
11
при
51
UM p 15 1;
I 0 при и 0..
1}
Управление ключами производится блоком 13 управления, который имеет характеристику при lU-iol
13
13
1при Up о;.
0при (и,, I 0;
1при (и I 0; Опри и,, 0.
при и
При снятии входного сигнала (U. 0) на выходе блока 13 управления дут следующие значения сигналов:
:, 1;
Ui оРассмотрим работу устройства при подаче на его вход (клемма 18) напряжения, пропорционального заданному углу поворота вала электродвигателя . Это напряжение, пропорциональное площади, ограниченной кривой оаЬ (фиг. 2), подается на первьш вход блока 13 управления, при этом ключ 10 замыкается,а ключи 11 и 12 размы- каются. Входное напряжение U. подается на функциональный преобразователь 14, с выхода которого через сумматор 16, ключ 10, пропорциональный усилитель 9, сумматор 5, регулятор тока 6, блок 2 регулирования напряжения, датчик 8 тока - на электродвигатель 7. При вращении якоря электродвигателя сигнал датчика час тоты вращения подается через сумматор 3 на регулятор 4 частоты вращения. Сигнал датчика 8 тока подается на сумматор 5. Напряжение U s Up подается на интегратор 15. Напряжение на его выходе начинает увеличиваться и подается на сумматор 16, на выходе которого напряжение изменяется по прямой cd (фиг. 2)в период разгона электродвигателя 1. Когда напряжение на выходе интегратора 15 превьшает напряжение на втором входе сумматора 16, начинается замедление электродвигателя 1 по прямой de. Изменение напряжения на выходе интегратора 15 происходит по прямой ode, так как на его входе в период всего цикла приложено постоянное напряжение U Up . Когда напряжение с выхода сумматора 16 через ключ
3398546
10 подается на вход интегратора 17, на его выходе напряжение увеличивается по второй оЬ при разгоне электродвигателя 1 и уменьшается по кривой аЬ при его замедлении. Это напряжение пропорционально заданной скорости W и, . При напряжении на выходе интегратора 17, равном ную, на выходах блока 13 U 1; и 0. При этом ключ 10 размыкается и сигнал на его выходе становится равным нулю,а ключи 11 и 12 замыкаются и интеграторы 15 и 17 подготавливаются к следующему циклу.Электродвигатель 1 останавливается.
Таким образом, обеспечивается автоматическая остановка электр-опри- вода при любом задании входного
сигнала U .
Для разгона электродвигателя 1 в обратную сторону необходимо сигнал задания угла поворота двигателя и подать противоположной полярности. При снятии сигнала U на выходе блока 13 управления устанавливаются логические уровни U;, 1; и,, 0. При этом ключ 10 разомкнут, а ключи 11 и 12 замкнуты.
Работа электродвигателя 1 производится по оптимальному закону по потерям энергии, так как его движение производится по кривой оаЬ (фиг. 2) с оптимальным временем цикла.
Формула изобретения
Электропривод с оптимальным управлением,содержащий электродвигатель постоянного тока, подключенный к блоку регулирования напряжения,и последовательно соединенные первый сумматор,регулятор частоты вращения,второй сумматор и регулятор тока, выход которого подключен к входу блока регулирования напряжения, датчик частоты вращения и датчик тока якоря, выходы которых подключены к входам соответственно первого и второго сумматоров, отличающийся тем,что, с целью снижения потерь энергии,в него введены пропорциональный усилитель,выход которого подключен к входу второго сумматора, блок задания угла поворота, блок управения с двумя входами и двумя выходаи, функциональный преобразователь с двумя выходами и входом, соединен7
ным с вьсходом блока задания угла поворота и первым входом блока уп- .равления,и последовательно соединенные первый интегратор, третий сумматор, первый ключ и второй интегратор, выход которого подключен к входу первого сумматора и второму входу блока управления, второй и третий ключи подключены параллельно со- ответственно первому и второму интеграторам, управляющие входы второго и третьего ключей соединены с первым выходом блока управления,второй выход которого подключен к управляющему входу первого ключа,первый и второй выход функционального преобразователя соединены с входами соответственно третьего сумматора и первого интегратора, вход пропорционального усилителя соединен с входом второго интегратора, функцио
и) {(jJsUs)
, где , с и 54а
нальный преобразователь и блок управления реализуют следующие функциональные зависимости Ki
ТУ
х.
IY I -1Z I -t- I Z I ;
, с и
о( - ; Xi |Y| IZl,
где , с и
2
л , X j, Y, Z
аналоговые сигналы соответственно на входе и первЬм, втором выходах функционального преобразователя;
постоянные коэффйци- енты;
сигналы соответственно на первом и втором выходах и первом и втором входах блока управления.
So(ii, cf-frj 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с оптимальным управлением | 1987 |
|
SU1534719A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока | 1984 |
|
SU1264286A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
Изобретение относится к электротехнике и может быть использовано 18 для управления электродвигателями постоянного тока в механизмах циклического действия. Целью изобретения является снижение потерь энергии в электроприводе. Устройство содержит функциональный преобразователь 14, вход которого соединен с блоком 18 задания угла поворота и с первым входом блока 13 управления, последовательно соединенные первый интегратор 15, третий сумматор 16, первый ключ 10 и второй интегратор 17, выход которого подключен к входу первого сумматора 3. Устройство позволяет снизить потери электроэнергии за счет формирования диаграммы скорости оптимальной по потерям для каждого значения заданного угла поворота вала электродвигателя.2 ил. с (Л Сл: оо QO 00 сл 4; Фиг. 7
Редактор Л.Гратилло
Составитель В.Трофименко
Техред Л.Сердюкова Корректор А.Обручар
Заказ 4243/54 Тираж 659 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Асинхронный электропривод с экстремальным управлением | 1977 |
|
SU746855A1 |
| Нереверсивный вентильный электропривод постоянного тока | 1981 |
|
SU1070679A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
