4 tsd
эе
9

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| Способ автоматического управления электроприводом центрифуги и устройство для его осуществления | 1984 |
|
SU1292842A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
Изобретение относится к электротехнике и может быть использовано для привода валков клетей непрерыв- . ных прокатных станов. Снижение колебательности и улучшение динамических характеристик обеспечивается за счет введения второго функционалького преобразователя 16, причем выход пропорционального усилителя 6 регулятора 5 через функциональный преобразователь 9, а выход интегрального усилителя 7 регулятора скорости через функциональньй преобразователь 16 подключены к входам сумматора 10. Дополнение злектропривода функциональными преобразователями обеспечивает оптимальную по быстродействию отработку площади регулирования А Ф, возникающую под действием ударных нагрузок, соответственно снижается колебательность регулирования ско(Л рости. 3 ил.
15
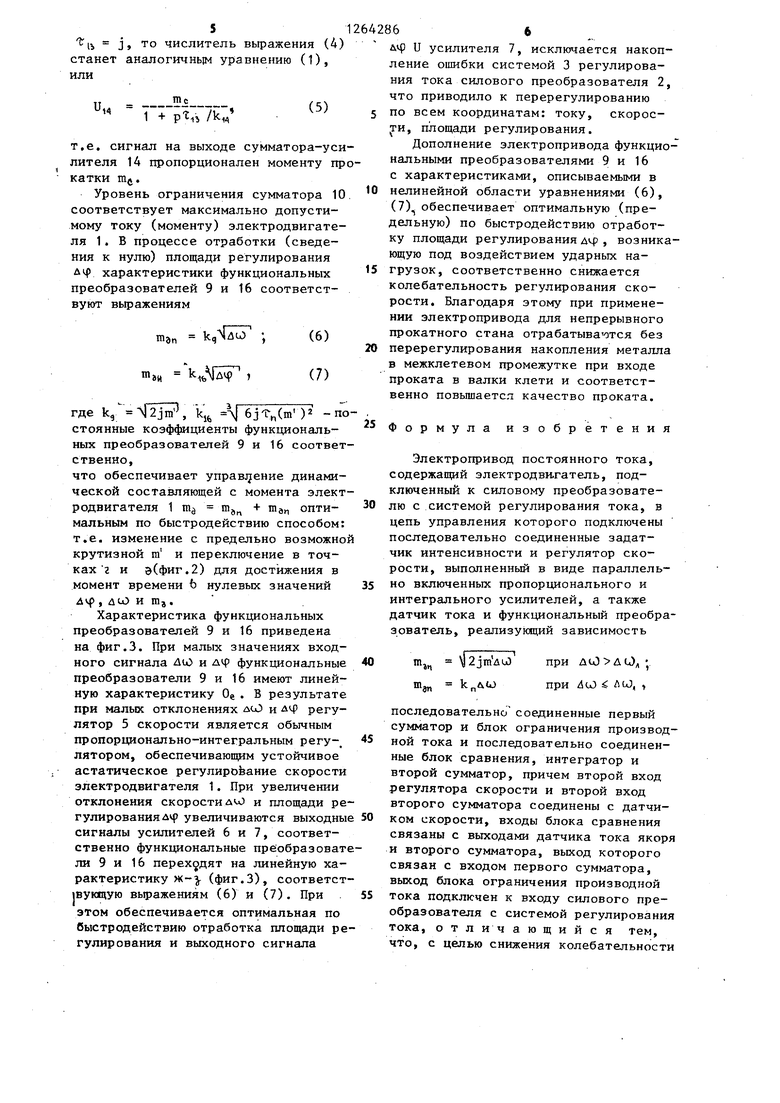
1 Изобретение относится к электротехнике, а .именно, к системам подчиненного регулирования электропривода, и может применяться для привода валков клетей непрерывных прокатных станов - сортовых,заготовочных,черновых групп непрерывных широкополосных трубопрокатных станов. Цель изобретения - снижение колебательности и улучшение динамических характеристик электропривода при обработке воздействий ударных нагрузок. На фиг,1 изображена функциональная схема электропривода; на фиг.2 временные диаграммы момента и рассогласований по скорости и по углу; на фиг.З - зависимости, реализуемые функциональными преобразователями. Электропривод содержит электродви гатель 1, подключенный к силовому преобразователю 2 с системой 3 регул рования тока, в цепь управления кото рого включены последовательно соеди ненные задатчик 4 интенсивности и регулятор 5 скорости, выполненный в виде параллельно включенных пропо ционального 6 и интегрального 7 уси лителей, а также датчик 8 тока и функциональный преобразователь 9, реализующий зависимость ди) ДСи) V2jmda) , kn л CJ последовательно соединенные первый сумматор 10 и блок 11 ограничения производной тока и последовательно соединенные блок 12 сравнения, интегратор 13 и второй сумматор 14, причем второй вход регулятора 5 ско рости и второй вход второго суммато ра 14 соединены с датчиком 15 скоро ти, входы блока 12 сравнения связаны с выходами датчика 8 тока якоря и сумматора 14, выход которого связан также с входом сумматора 10, выхо блока 11 ограничения -производной то ка подключен к входу силового преоб разователя 2. Кроме того, электропривод содержит второй функциональный преобразователь 16, реализующий зависимост (т )4Ч при - электромеханическая постоянная электропривода; 6 m - предельно допустимая крутизна нарастания момента электродвигателя; Ли)- рассогласование по скорости;% - постоянная времени интегрального усилителя; Ф- рассогласование по углу (интеграл отклонения скорости) ; Л14, дф - соответственно величины рассогласования по скорости и по углу, соответствующие точке перехода блока ограниченияпроизводной тока в режим ограничения; kn - коэффициент усиления пропорционального усилителя причем выход пропорционального усиителя 6 регулятора 5 скорости через функциональный преобразователь 9, а выход интегрального усилителя 7 регулятора скорости через функциональный преобразователь 16 подключен к входам сумматора 10. Электропривод работает следующим эбразом. Сигнал u)j на скорость электродвигателя 1 от задатчика 4 интенсивности сравнивается с сигналом обратной связи по скорости от датчика 15 скорости, и их разность преобразуется последовательно включенными регулятором скорости 5, функциональными преобразователями 9 и 16, сумматором 10, блоком 11 ограничения производной тока в сигнал задания на ток. Сигнал задания на ток преобразуется системой 3 регулирования тока, входящей в силовой преобразователь 2, в выпрямленное напряжение, которое соответствует Заданию на скорость СО, и подается на электродвигатель 1 в качестве питающего. При изменении питагацего напряжения изменяется скорость электродвигателя 1 . При отсутствии проката в валках клети и момента нагрузки электродвигат еля 1 на входах регулятора скорости сигналы задающий и обратной связи равны (u)tOj), соответственно на выходах регулятора 5 скорости, функциональных преобразователей 9 и 16, сумматора 10 и блока 11 сигналы нулевые, а выпрямленное напряжение силового преобразователя 2 определяется сигналом регулятора тока астатической системы 3 регулирования тока. При ударном приложении к электродвигателю 1 момента нагрузки тс вход проката в валки клети (диаграмма на фиг.2) - на интервале времени 0 происходит нарастание тока (или электромагнитного момента т) электродвигателя 1 с крутизной т . Крутиз на является предельно возможной и регламентируется блоком 11 ограничения производной тока. Пока электромагнитный момент га электродвигателя 1 меньше момента прокатки in. (интервал времени 0) происходит снижение скорости U)электродвигателя 1 и увеличение рассогласования по скорости лсо на входе регулятора скорссти в соответствии с уравнением механического равновесия m - m. pJAU3, где p - символ дифференцирования. Из уравнения (1) следует, что при знак динамического момента ™ PJ1J отрицательный, соответственно отрицательное ускорение электродвигателя 1 и его скорость снижается. На участке Оа происходит увеличение выходного сигнала U усилителя 7 регулятора 5 скорости в соответ ствии с уравнением
что соответствует увеличению площади регулирования.
В момент времени а (фиг.2) не. личина m уравнивается с величиной го, снижение скорости прекращается. Для последующей обработки рассогласования Ди), достигшей к моменту времени х максимальной величины, динамический момент т должен стать положительным, чтобы обеспечить рост скорости U) до первоначальной величины Oj. Рост электромагнитного момента га электродвигателя 1 и соответственно реверс и рост динамического момента га обеспечивается с помощью возрастающего сигнала Аф U усилителя 7. Благодаря этому в момент времени сГ (фиг.2) рассогласование скорости л сО на входе регулятора скорости сводится к нулю, а рост площади регулирования и сигнала Дф U
(m - и,, ) -uj U,4 , (3)
kiA
:pr«
де k 1 , U,4 - коэффициент усиления
и выходной сигнал сумматора-усилителя 14; m - сигнал тока (момента) электродвигателя -1, подводимый от датчика 8 тока;
.TIJ - постоянная интегрирования интегратора 13; 1/р - символ интегрирования. Из уравнения (3) получаем
.
(4)
l pt7i 7krt
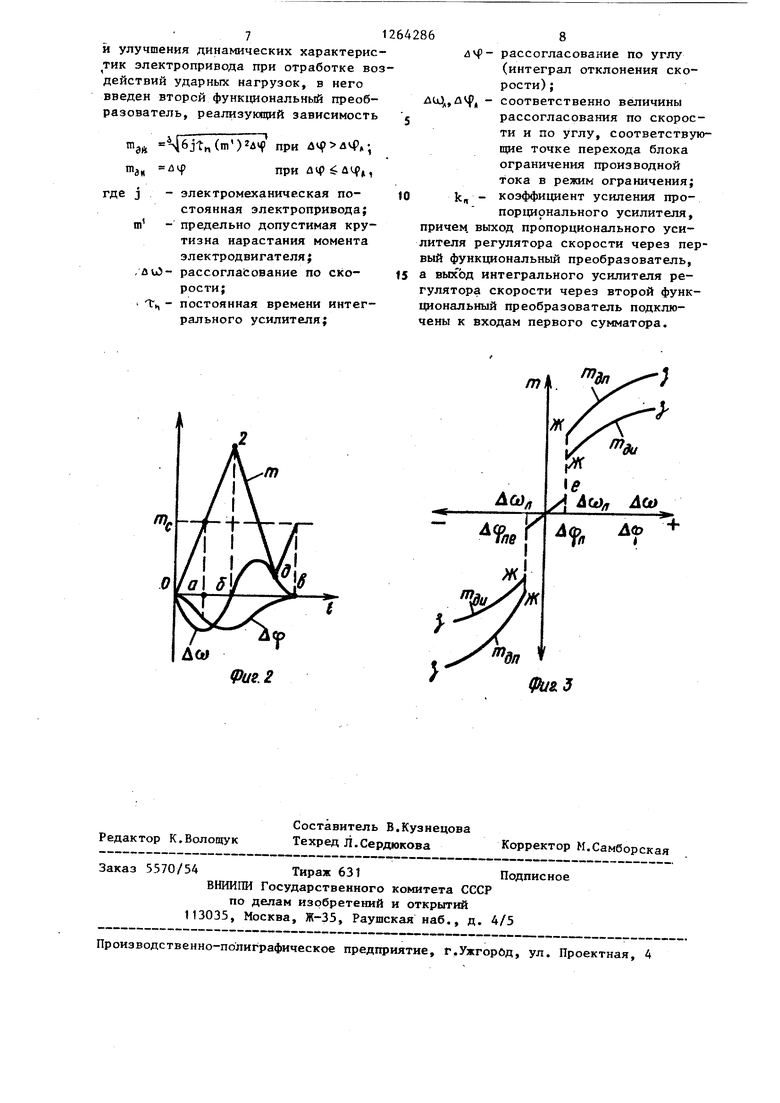
Если постоянную интегрирования t,j принять равной электромеханической постоянной j .электропривода, т.е. усилителя 7 прекращается. Для сведения к нулю площади регулирования и соответственно сигнала дф U усилителя 7 необходимо обеспечить рост скорости U) электродвигателя 1 или среверсировать рассогласование по скорости Дсо на входе регулятора скорости. При этом необходимо одновременно начать снижение электромагнитного момента m и динамического момента Ша электродвигателя 1, чтобы к моменту времени Ь (фиг.2) сведения к нулю площади регулирования и выходного сигнала лф и усилителя 7 оказались также нулевыми динамический момент Год и рассогласование по скорости ли) электродвигателя 1, т.е. необходимо с помощью выходного сигнала аФ и усилителя 7 управлять переключениями динамического момента Шд оптимальным способом. Чтобы управлять динамическим моментом электродвигателя 1 с обеспечением предельной по быстродействию обработки площади регулирования Дф, на регулятор 5 скорости возможна функция управления только динамической составляющей шд момента т. Для ввода в систему 3 регулирования тока силового преобразователя 2 задающего сигнала момента прокатки fflg через сумматор tO с ограничением используется контур, составленный из интегратора 13 и сумматора-усилитея 14. Контур функционирует согласно уравнению; 1 j О числитель вьфажения (4) станет аналогичным уравнению (1), или т.е. сигнал на выходе сумматора-усилителя 14 пропорционален моменту про катки т. Уровень ограничения сумматора 10 соответствует максимально допустимому току (моменту) электродвигателя 1 . В процессе отработки (сведения к нулю) площади регулирования Дф характеристики функциональных преобразователей 9 и 16 соответствуют выражениям man цЧл ; (6) mji, (7) где k, 42ji , kl л| 6jT(m )2 - по стоянные коэффициенты функциональных преобразователей 9 и 16 соответ ственно, что обеспечивает управ:;ение динамической составляющей с момента элект родвигателя 1 т fflj, + Шап оптимальным по быстродействию способом: т.е. изменение с предельно возможно крутизной т и переключение в точках г и э(фиг.2) для достижения в момент времени Ь нулевых значений 4vf , дю и т,. Характеристика функциональных преобразователей 9 и 16 приведена на фиг.3. При малых значениях входного сигнала ДЮ и дф функциональные преобразователи 9 и 16 имеют линейную характеристику Og. В результате при малых отклонениях дО и Дф регулятор 5 скорости является обычным пропорционально-интегральным регулятором, обеспечивающим устойчивое астатическое регулироЬание скорости электродвигателя 1. При увеличении отклонения скор ости Дл) и площади ре гулирования ДЦ увеличиваются выходны сигналы усилителей 6 и 7, соответственно функциональные преобразоват ли 9 и 16 переходят на линейную характеристику ж- (фиг.З), соответст 1ву1ацую вьфажениям (6) и (7). При этом обеспечивается оптимальная по быстродействию отработка площади ре гулирования и выходного сигнала 6 ЛЦЗ и усилителя 7, исключается накопление ошибки системой 3 регулирования тока силового преобразователя 2, что приводило к перерегулированию по всем координатам: току, скорос ги, площади регулирования. Дополнение электропривода функциональными преобразователями 9 и 16 с характеристиками, описываемыми в нелинейной области уравнениями (6), (7) обеспечивает оптимальную (предельную) по быстродействию отработку площади регулирования дц) , возникающую под воздействием ударных нагрузок, соответственно снижается колебательность регулирования скорости. Благодаря этому при применении электропривода для непрерывного прокатного стана отрабатываются без перерегулирования накопления металла в межклетевом промежутке при входе проката в валки клети и соответственно повышается качество проката. Формула изобретения Электропривод постоянного тока, содержащий электродвигатель, подключенный к силовому преобразователю с системой регулирования тока, в цепь управления которого подключены последовательно соединенные задатчик интенсивности и регулятор скорости, выполненный в виде параллельно включенных пропорционального и интегргшьного усилителей, а также датчик тока и функциональный преобразователь, реапизуКщий зависимость j 2jirfMO при )л; mjn „&W при 4tO ALO, , последовательно соединенные первый сумматор и блок ограничения производной тока и последовательно соединенные блок сравнения, интегратор и второй сумматор, причем второй вход регулятора скорости и второй вход второго сумматора соединены с датчиком скорости, входы блока сравнения связаны с выходами датчика тока якоря и второго сумматора, выход которого связан с входом первого сумматора, выход блока ограничения производной тока подключен к входу силового преобразователя с системой регулирования тока, отличающийся тем, что, с целью снижения колебательности 7 и улучшения динамических характерис тик электропривода при отработке во действий ударных нагрузок, в него введен второй функциональный преобразователь, реализующий зависимость 46Jt«(m)2Avf при лф при лц) лц,1, где j - электромеханическая постоянная электропривода; т - предельно допустимая крутизна нарастания момента электродвигателя; /лО- рассогласование по скорости;I f,, - постоянная времени интегрального усилителя; 86 4Ц)- рассогласование по углу (интеграл отклонения скорости) ; U),nvf, - соответственно величины рассогласования по скорости и по углу, соответствуюпще точке перехода блока ограничения производной тока в режим ограничения; It - коэффициент усиления пропорционального усилителя, причем, выход пропорционального усилителя регулятора скорости через первый функциональный преобразователь, а выход интегрального усилителя регулятора скорости через второй функциональный преобразователь подключены к входам первого сумматора.
(pus. 2
/77
-
Фив.
| Авторское свидетельство СССР № 913541, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ЗАБОРА ОТДЕЛЯЕМОГО ИЗ ПОСЛЕОПЕРАЦИОННОЙ РАНЫ | 2007 |
|
RU2337722C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1156229, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
