113398612
Изобретение относится к электро-аппроксимацию с помощью простьЕХ ре- технике, а именно к частотно-регули-зисторно-диодных схем, руемым электроприводам, построенным Частотно-регулируемый электропри- на основе асинхронного двигателя свод работает следующим образом, короткозамкнутым ротором с экстрема-
льным управлением по минимуму потерь, Сигнал задания U, поступает на
и может быть использовано в системахвходы блоков 3 и 4 управления частои механизмах общепромышленного казна-той и напряжением соответственно,
чения. QЦепь регулирования частоты разомкнуЦелью изобретения является упро-тая, а цепь регулирования напряжения
щение и повьаиение надежности электро-замкнутая и содержит в обратной связи
привода.блок 8 вычисления оптимального потоНа фиг.1 представлена функциональ-ка. На входы этого блока 8 поступает
ная схема частотно-регулируемого информация об измеренных частоте о(
электропривода; на фиг.2 и 3 - види моменте и с выходов датчиков частозависимостей, реализуемых в первом иты 5 и момента 7 соответственно. На
втором функциональных преобразовате-выходе блока 8 вычисления оптимальнолях соответственно.го потока формируется сигнал ф,
Частотно-регулируемый электропри- который сравнивается с сигналом дейвод содержит асинхронный двигатель 1ствительного потока Ф, поступающего
(фиг. 1) ,подключенньш к выходам стати-с выхода датчика 6 потока. Результат
ческого преобразователя 2 частоты,блоксравнения о указанных сигналов с вы3 управления частотой и блок 4управле-хода элемента 9 сравнения поступает
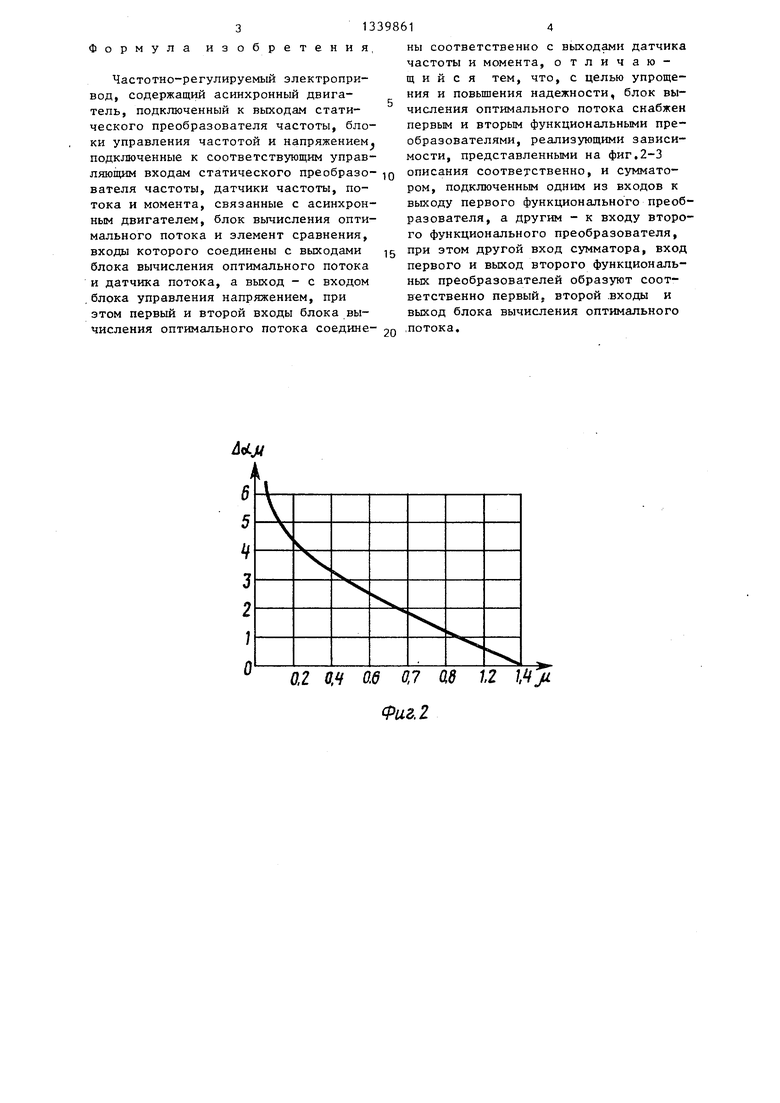
ния напряжением,подключенные к соотБст-25на блок 4 управления напряжением, ствующим управляющим входам статического преобразователя 2 частоты, дат- Оптимальное значение потока Ф,, чик 5 частоты, датчик 6 потока и дат-соответствующее минимальным потерям чик 7 момента, связанные d асинхрон-двигателя, убывает с увеличением ча- ным двигателем 1, блок 8 вычисления 30стоты d и уменьшением (момента) наг- оптимального потока и элемент 9 срав-рузки /и. Это позволяет совместить нения, входы которого соединены с вы-зависимости Для различных зна- ходами блока 8 вычисления оптимально-чений в одну плавную зависимость го потока и датчика 6 потока, а вы-ф д (о/ч-ло, реализуемую одним ход - с входом блока 4 управленияфункциональным преобразователем 11, напряжением, при этом первый и второй зависимость idf от )u реализуется входы блока 8 вычисления оптимальногофункциональным преобразователем 10. потока соединены соответственно сХарактер указанных зависимостей, по- выходами датчика 5 частоты и датчикалученных для различных типов двигате- момента. одинаков. На фиг. 2 и 3 дан приВ частнотно-регулируемом электро- зависимостей для асинхронных дви- приводе блок 8 вычисления оптимально-.телей серии 4А, полученных в ре- го потока снабжен первым и вторымзультате уточненного расчета с уче- функциональными преобразователями 10 насыщения и температурных измене- и 11 и сумматором 12, подключенным параметров двигателя и скоррек- одним из входов к выходу первого фун-тированных в результате ряда экспери- кционального преобразователя 10, а.„ентов. Параметры на фиг.2 и 3 пред- выходом - к входу второго функциона-„авлены в относительных единицах, льного преобразователя 11. При этом
другой вход сумматора 12, вход перво- Таким образом, поддержание потока
го и выход второго функциональныхна оптимальном уровне и управление
преобразователей 10 и 11 образуют со-по минимуму потерь осуществляются в
ответственно первый и второй входычастотно-регулируемом электроприводе
и выход блока 8 вычисления оптималь-без сложного aлгopипv a с помощью проного потока. Реализуемые в первом истых в реализации функциональных превтором функциональных преобразовате-образователей, благодаря чему упрощалях 10и11 зависимости (фиг.2 и 3)ется конструкция и повышается надежимеют монотонный характер, позволяю-ность электропривода в сравнении с
щий обеспечить их кусочно-линейнуюизвестным решением.
ормула иэобре
1339861 тения,
н ч н ч п о м
Частотно-регулируемый электропривод, содержащий асинхронный двигатель, подключенный к выходам статического преобразователя частоты, блоки управления частотой и напряжением подключенные к соответствующим управляющим входам статического преобразо- IQ описания соответственно, и сумматователя частоты, датчики частоты, потока и момента, связанные с асинхронным двигателем, блок вычисления оптимального потока и элемент сравнения, входы которого соединены с выходами блока вычисления оптимального потока и датчика потока, а выход - с входом ,блока управления напряжением, при этом первый и второй входы блока вычисления оптимального потока соедине1
ны соответственно с выходами датчика частоты и момента, отличающийся тем, что, с целью упрощения и повьшения надежности, блок вычисления оптимального потока снабжен первым и вторым функциональными преобразователями, реализующими зависимости, представленными на фиг.2-3
ром, подключенным одним из входов к выходу первого функционального преобразователя, а другим - к входу второго функционального преобразователя, при этом другой вход сумматора, вход первого и выход второго функциональных преобразователей образуют соответственно первый, второй .входы и выход блока вычисления оптимального ,потока.
сриг.2
Редактор Л.Гратилло
Составитель А.Жилин
Техред Л.Сердюкова Корректор А.Обручар
Заказ 4243/54 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фи.г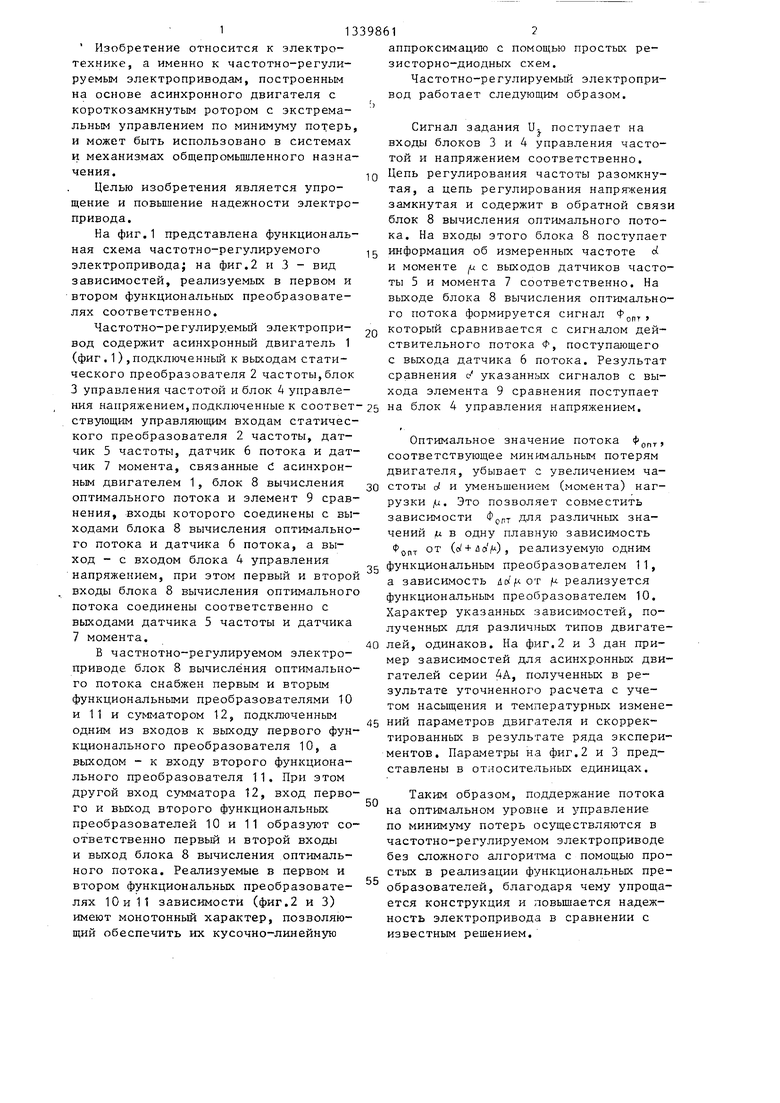
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1379932A2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| Частотно-регулируемый электропривод | 1985 |
|
SU1350802A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Частотно-управляемый асинхронный электропривод | 1982 |
|
SU1083316A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2017 |
|
RU2677682C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
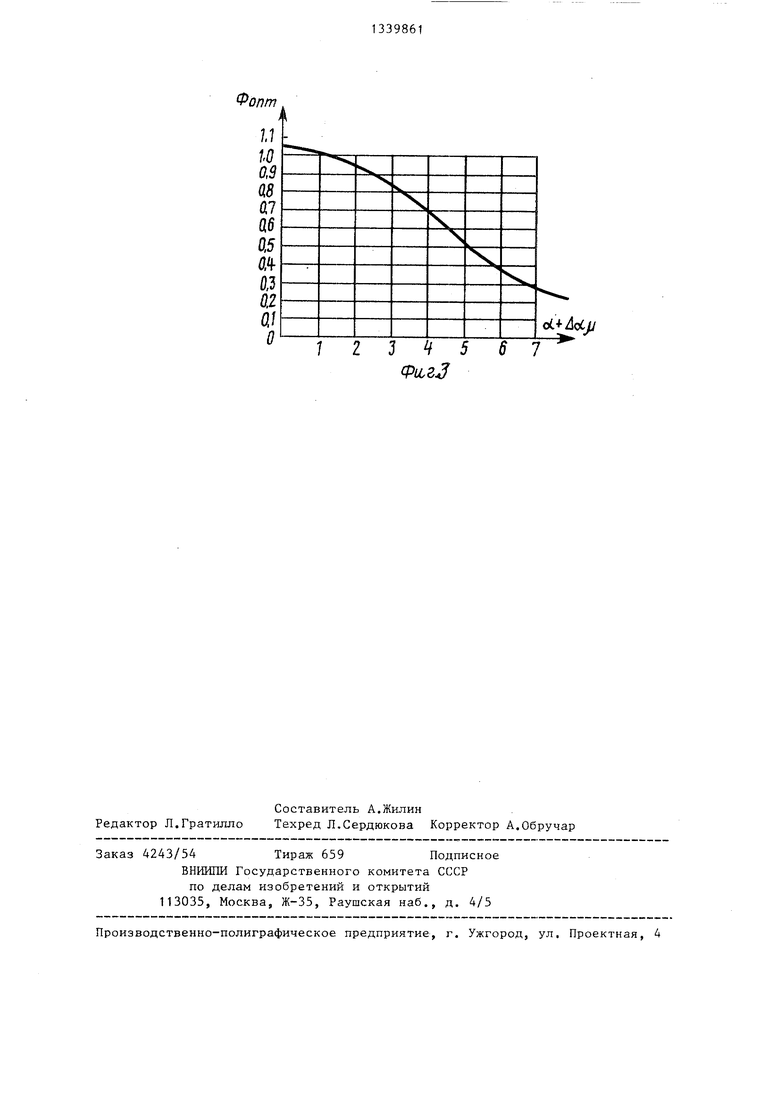
Изобретение относится к электротехнике. Целью изобретения является упрощение и повьшение надежности. Указанная цель достигается тем, что в частотно-регулируемом электроприводе блок 8 вычисления оптимального потока снабжен функциональными преобразователями (ФП) 10, 11 и сумматором (С) 12. Один вход С 12 соединен с выходами ФП 10, 11, а выход С 12 - с входом ФП 11, другой вход С 12 подключен к выходу задатчика частоты 5. Каждый ФП 10,11 реализует монотонную зависимость. Благодаря этому в электроприводе обеспечивается поддержание потока на оптимальном уровне и управление по минимуму потерь без сложного алгоритма с помощью простых в реализации ФП 10, 11о 3 ил. (Л со оо 00 05 Фиг.1
| Асинхронный электропривод с экстремальным управлением | 1978 |
|
SU888319A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сандлер А.С., Сарбатов Р.С | |||
| Частотное управление асинхронньии двигателями, М | |||
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
