13
Изобретение относится к средствам управления приводами, преимущественно на текстильных вытяжных машинах.
Цель изобретения - повышение точности управления.
На фиг. 1 изображена структурная схема устройства; на фиг. 2 структурная схема блока управления.
Устройство включает регулятор 1 скорости привода 2, датчики натяжения 3 и отрыва 4 жгута 5, кoм fyтaтop 6, блок 7 управления, первое интегрирующее звено 8, ограничитель 9, второе интегрирующее звено 10, за- датчик 11 заправочной скорости, датчик 12 скорости жгута 5, который сматывается с паковки 13 механизмом 14 намотки. Датчик 3 и задатчик 15 натяжения связаны через элемент 16 сравнения с входом первого интегрирую звена 8, выход которого соединен с входом коммутатора 6, а датчик 4 отрыва жгута 5 соединен с вкoдa D второго интегрирующего звена 10 и коммутатора 6, выход которого связан с входом блока 7 управления, а выходы второго интегрирующего звена 10 соединены соответственно с входом коммутатора 6 и выходом блока 7 управления, связанным с входом первого интегрирующего звена 8 и входом ограничителя. 9, второй вход которого соединен с задатчиком 11 заправочной скорости, а выходы - соответственно с входом блока 7 управления и входом регулятора 1 скорости привода 2, второй вход которого связгтн с ком 12 скорости жгута 5. 3веио 8 содержит конденсатор 17 и сопротивление 18. Ограничитель 9 выполнен в виде операционного усилителя 19, охваченного обратной связью через одно- полярный нуль-орган 20 и диод 21. Интегрирующее звено 10 состоит из конденсатора 22 и сопротивления 23. Коммутатор 6 вьшолнен в виде реле 24 повторителя, связанного с источником 25 опорного напряжения и управляемого нормально-открытым контактом 26 датчика 4 отрыва жгута 5.
Переключающий контакт 27 реле 24 повторителя подключает первое и второе интегрирующие звенья 8 и 10 к корпусу, а нормально-открытый контакт 28 этого реле связывает сопротивление 23 с источником 29 опорного напряжения. Задатчик 11 заправочной скорости выполнен в виде переменного со12
гтротивления 30, входом связанного с источником 31 опорного напряжения.
Устройство работает следующим образом.
Жгут 5 с паковки 13 поступает на механизм 14 намотки. Скорость намотки измеряется датчиком 12 скорости жгута 5, а заданное значение скорости намотки формируется регулятором 1 скорости привода 2.
В режиме автоматического управления коррекция оборотов привода 2 осуществляется следующим образом. Сигналы от датчика 3 и задатчика 15 натяжения жгута 5 подаются на входы элемента 16 сравнения, формирующего сигнал рассогласования Не путем алгебраического суммирования сигналов
Ug и из. Сигнал рассогласования Ue подается на вход первого инте- грир тощего звена 8 и далее через коммутатор 6 на вход блока 7 управления, выходной сигнал которого через ограничитель 9 подается на вход регулятора 1 скорости привода 2 и на вход первого интегрирующего звена 8. В момент отрыва жгута 5 срабатывает датчик 4 отрыва жгута 5, управляющий коммутатором 6. При этом коммутатор 6 замыкает вход блока 7 управления и выход первого интегрирую- и;его звена 8, подключая на другой вход блока 7 управления выход второго интегрирующего звена 10. После этого выходной сигнал блока 7 управления монотонно уменьшается до значения 5orip) устанавливаемого ограничителем 9, а величина этого значения задается задатчиком 11 заправочной скорос
т и.
При достижении выходным сигналом порогового значения со э„р ограничитель 9 обеспечивает подачу ограничивающе45 го воздействия на вход блока 7 управления, тем самым поддерживая на выходе ограничителя 9 сигнал, равный W jnp- Установленное таким образом значение заправочной скорости будет
50 по;здерживаться регулятором 1 скорости привода 2 до момента перезаправки жгута 5. После устранения отрыва жгута 5 коммутатор 6 деблокируется и вновь соединяет первое интегри55 рующее звено 8 с входом блока 7 управления и начинает увеличивать скорость привода 2, увеличивая тем самым значение натяжения жгута 5 до заданного значения.
13
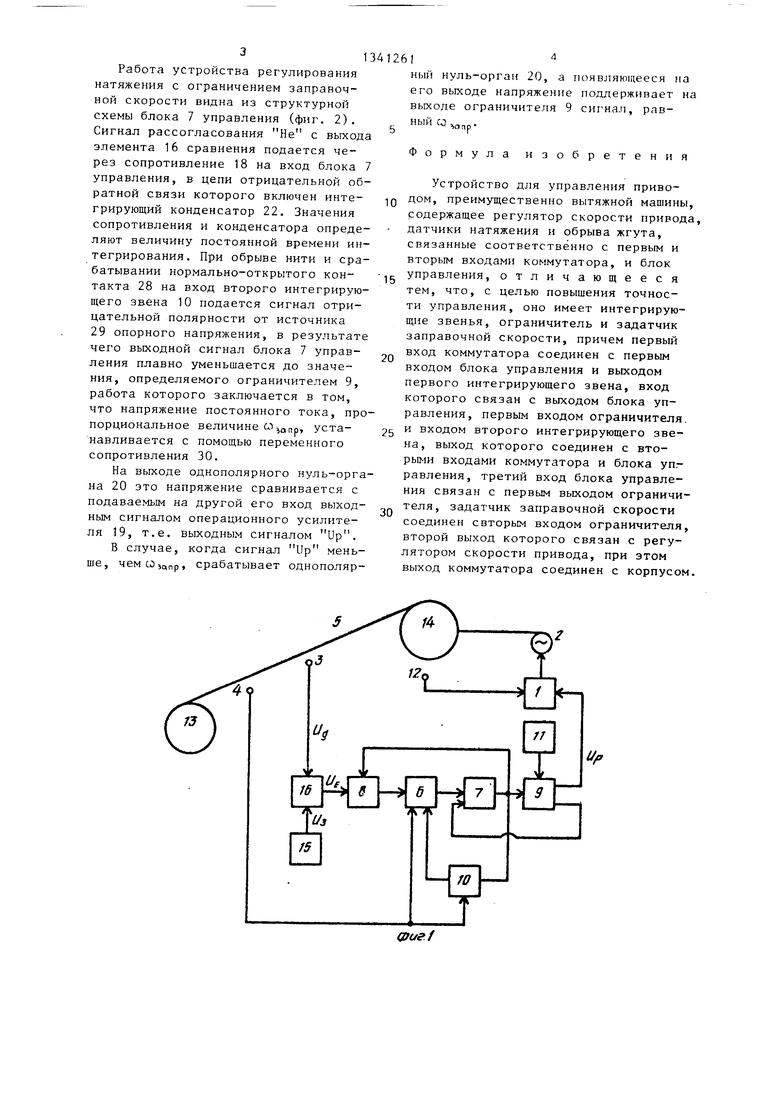
Работа устройства регулирования натяжения с ограничением заправочной скорости видна из структурной схемы блока 7 управления (фиг. 2). Сигнал рассогласования Не с выхода элемента 16 сравнения подается через сопротивление 18 на вход блока 7 управления, в цепи отрицательной обратной связи которого включен интегрирующий конденсатор 22. Значения сопротивления и конденсатора определяют величину постоянной времени интегрирования. При обрыве нити и срабатывании нормально-открытого контакта 28 на вход второго интегрирующего звена 10 подается сигнал отрицательной полярности от источника 29 опорного напряжения, в результате чего выходной сигнал блока 7 управления плавно уменьшается до значения, определяемого ограничителем 9, работа которого заключается в том, что напряжение постоянного тока, пропорциональное величине , устанавливается с помощью переменного сопротивления 30.
На выходе однополярного нуль-органа 20 это напряжение сравнивается с подаваемым на другой его вход выходным сигналом операционного усилителя 19, т.е. выходным сигналом Up.
В случае, когда сигнал Up меньше, чемсОздпр срабатывает однополяр1261
ный нуль-орган 20, а появляющееся на его выходе напряжение поддерживает на выходе ограничителя 9 сигнал, равный со
Формула
изобретения
0
5
0
5
0
Устройство для управления приводом, преимущественно вытяжной машины, содержащее регулятор скорости привода, датчики натяжения и обрыва жгута, связанные соответственно с первым и вторым входами коммутатора, и блок управления, отличающееся тем, что, с целью повышения точности управления, оно имеет интегрирующие звенья, ограничитель и задатчик заправочной скорости, причем первый вход коммутатора соединен с первым входом блока управления и выходом первого интегрирующего звена, вход которого связан с выходом блока управления, первым входом ограничителя. и входом второго интегрирующего звена, выход которого соединен с вторыми входами коммутатора и блока уп,- равления, третий вход блока управления связан с первым выходом ограничителя, задатчик заправочной скорости соединен свторым входом ограничителя, второй выход которого связан с регулятором скорости привода, при этом выход коммутатора соединен с корпусом.
Составитель Б.Быковский Редактор А.Долннич Техред М.Дидык Корректор С.Шекмар
Заказ 44(У7/34 Тираж 427Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Прсшчнпдственно-полиграфическое предприятие, г, Ужгород, ул. lIpcieK i и IH , 4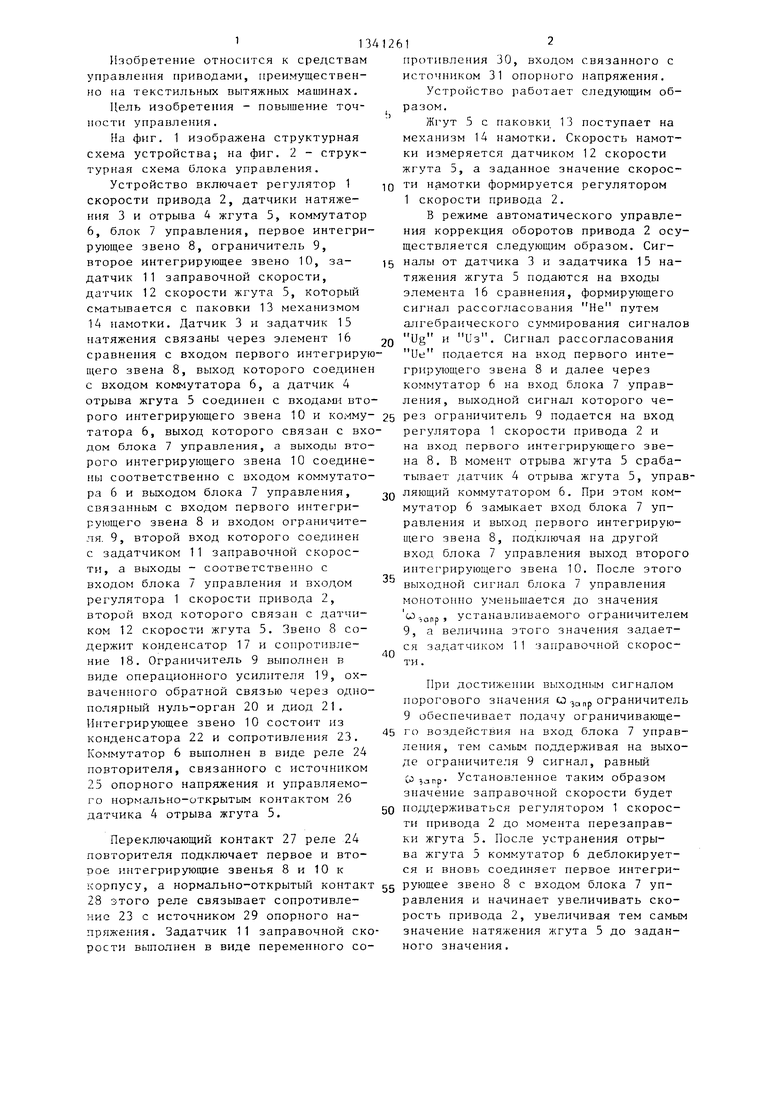
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом | 1983 |
|
SU1180411A1 |
| Способ управления процессом формования химических нитей | 1978 |
|
SU931832A2 |
| Устройство для управления раскладчиком мотального механизма | 1982 |
|
SU1074790A1 |
| Устройство контроля производительности многоместного прядильного агрегата | 1988 |
|
SU1724750A1 |
| Устройство для регулирования натяжения нити на мотальном автомате | 1981 |
|
SU1027127A1 |
| Устройство для регулирования натяжения при намотке длинномерного материала | 1988 |
|
SU1627488A1 |
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
| Регулятор натяжения нити при намотке на паковку | 1976 |
|
SU636168A1 |
| Устройство для регулирования напряжения импульсной дуги | 1983 |
|
SU1098705A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
Изобретение относится к средствам управления приводами преимущественно на текстильных вытяжных машинах. Цель изобретения - повышение точности управления. Устройство включает паковку 13, наматывающий механизм 14 с приводом 2, датчики натяжения 3 и обрыва 4 жгута 5, связанные посредством коммутатора 6 с блоком 7 управления, выход которого соединен через ограничитель 9 и регулятор 1 скорости с приводом 2, В случае обрыва жгута 5 коммутатор 6 подсоединяет к входу блока 7 управления интегрирующее звено 8, в результате чего скорость привода 2 плавно уменьшается до величины, определяемой ограничителем 9 и значение которой задается задатчиком 11 заправочной скорости. После, устранения обрыва жгута 5 схема приходит в исходное состояние, 2 ил. ю (Л
| Устройство для управления приводом | 1983 |
|
SU1180411A1 |
