2. Устройство по П.1, о т л н чающееся тем, что блок
управления снижением скорости вы11олнен 3 виде реле времени.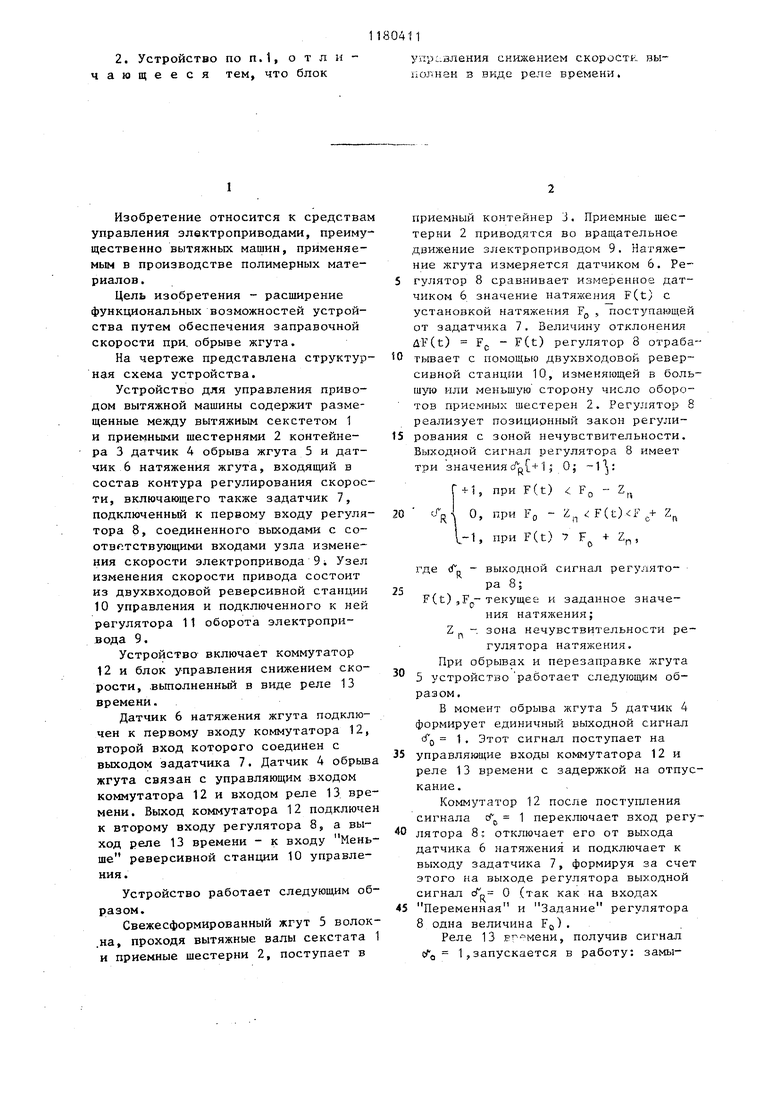

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом | 1985 |
|
SU1341261A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| Устройство для контроля за работой прядильных машин | 1976 |
|
SU592886A1 |
| Способ управления процессом формования химических нитей | 1978 |
|
SU931832A2 |
| Устройство для размотки рулонного материала | 1979 |
|
SU903267A1 |
| Устройство для управления аккумуля-TOPOM пОлОСы | 1979 |
|
SU814499A1 |
| Поточная линия для обработки ткани | 1988 |
|
SU1668509A1 |
| Устройство для управления перезаправкой приемного контейнера | 1980 |
|
SU933840A1 |
| Устройство управления реверсивным правильно-дрессировочным станом | 1980 |
|
SU884768A1 |
| Устройство для автоматического запуска и регулирования уровня жидкого металла в кристаллизаторе машины непрерывного литья стали | 1978 |
|
SU730460A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ преимущественно вытяжной машины, содержащее датчик обрыва жгута и контур регулирования скорости, включающий датчик и задатчик, подключенный к первому входу регулятора, соединенного выходами с соответствующими входами узла изменения скорости привода, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения заправочной скорости при обрыве жгута, оно имеет коммутатор и блок управления снижением скорости, причем датчик контура регулирования скорости подключен к первому входу коммутатора, задатчик дополнительно соединен с вторым входом коммутатора, управляющий вход которого связан с датчиком обрыва жгута и входом блока i управления снижением скорости, а соответствующий вход узла изменения скорости привода дополнительно подключен к выходу блока управления снижением скорости. 00 
Изобретение относится к средства управления электроприводами, преиму щественно вытяжных машин, применяемым в производстве полимерных материалов . Цель изобретения - расширение функциональных возможностей устройства путем обеспечения заправочной скорости при, обрыве жгута. На чертеже представлена структур ная схема устройства. Устройство для управления приводом вытяжной машины содержит размещенные между вытяжным секстетом 1 и приемными шестернями 2 контейнера 3 датчик 4 обрыва жгута 5 и датчик 6 натяжения жгута, входящий в состав контура регулирования скорос ти, включающего также задатчик 7, подключенный к первому входу регуля тора 8, соединенного выходами с со отвптствующими входами узла изменения скорости электропривода 9i Узел изменения скорости привода состоит из двухвходовой реверсивной станции 10 управления и подключенного к ней регулятора 11 оборота электропривода 9. Устройство включает коммутатор 12 и блок управления снижением скорости, .вьтолненный в виде реле 13 времени. Датчик 6 натяжения жгута подключен к первому входу коммутатора 12, второй вход которого соединен с выходом задатчика 7. Датчик 4 обрьш жгута связан с управляющим входом коммутатора 12 и входом реле 13 вре мени. Выход коммутатора 12 подключе к второму входу регулятора 8, а выход реле 13 времени - к входу Мень ше реверсивной станции 10 управления . Устройство работает следующим об разом. Свежесформированный жгут 5 волок .на, проходя вытяжные валы секстата и приемные шестерни 2, поступает в приемный контейнер 3, Приемные шестерни 2 приводятся во вращательное движение злектроприводом 9. Натяжение жгута измеряется датчиком 6. Регулятор 8 сравнивает измеренное датчиком 6 значение натяжения F(t) с установкой натяжения F, , поступающей от задатчика 7. Величину отклонения ub4t) Fj. - F(t) регулятор 8 отрабатывает с помощью двухвходовой реверсивной станции 10, изменяющей в большую или меньшую сторону число оборотов приемных шестерен 2. Регулятор 8 реализует позиционный закон регулирования с зоной нечувствительности. Выходной сигнал регулятора 8 имеет три значения cf( , 0; Г + , при F(t) FO - Z,, fA О, при FO - (t)F + Z 1-1, при F(t) 7 F н- Z, где fn выходной сигнал регулятора 8; F(t)jFp- текущее и заданное значения натяжения; гулятора натяжения. При обрывах и перезаправке жгута 5 устройство работает следующим образом. В момент обрыва жгута 5 датчик 4 формирует единичный выходной сигнал 1 . Этот сигнал поступает на управляющие входы коммутатора 12 и реле 13 времени с задержкой на отпускание. Коммутатор 12 после поступления сигнала cf 1 переключает вход регулятора 8: отключает его от выхода датчика 6 натяжения и подключает к выходу задатчика 7, формируя за счет этого на выходе регулятора выходной сигнал . О (так как на входах Переменная и Задание регулятора 8 одна величина FQ). Реле 13 вг ь5ени, получив сигнал 1,запускается в работу: замы3 11804114
кает контакт Меньше станции 10 рость приемных шестерен равна запрауправления и выдерживает его в этомночной,
псхпожении в течение времени задержкиПосле перезаправки жгута на выi , выбранной с учетом требуемогоходе датчика 4 формируется сигнал
снижения скорости приемных шесте-j 1, коммутатор 12 устанавливаетрен 2, Спустя время t , реле 13 от-ся в исходное состояние, а система
ключается, а его контакт в цепи стан-управления работаетв режимерагулироции 10 управления размыкается. Ско-вания скорости в функции натяжения жгута.
| Мильман Я.В | |||
| и др | |||
| Автоматизация технологических процессов текстильной промьшшенности | |||
| - М.: Машиностроение, 1971, с | |||
| СПОСОБ ПОЛУЧЕНИЯ ЧИСТОГО ГЛИНОЗЕМА И ЕГО СОЛЕЙ ИЗ СИЛИКАТОВ ГЛИНОЗЕМА, ПРОСТЫХ ГЛИН И. Т.П. | 1915 |
|
SU280A1 |
| Рельсовый башмак | 1921 |
|
SU166A1 |
