1
Изобретение относится к общему машиностроению и может быть использовано в робототехнике (например, в исполнительных механизмах штамповочных автоматов или печатных машин).
Цель изобретения - расп ирение эксплуатационных возможностей путем обеспечения возможности регулировки величины хода ведомого звена в широких пределах.
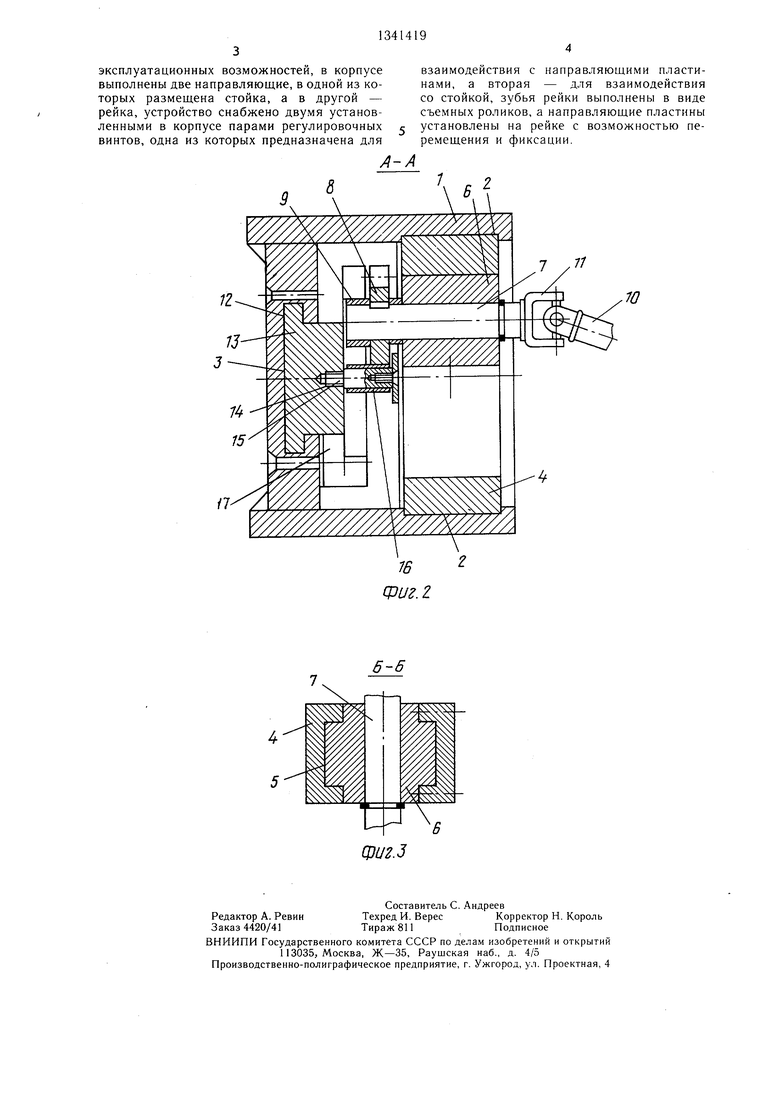
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг.. 1.
Устройство содержит корпус 1, выполненные в корпусе 1 горизонтальные направляющие 2 и 3. В направляющих 2 размещена стойка 4 с вертикальными на- правляюпшми 5, в которых установлен ползун 6.
В ползуне 6 размещен ведущий вал 7 с установленными на нем жестко зубчатым колесом 8 и щарнирно - роликом 9. Ведущий вал 7 соединен с приводом 10 с помощью универсального щарнира II. В направляющих 3 корпуса 1 установлена рейка 12, взаимодействующая с зубчатым колесом 8. Рейка 12 выполнена в виде планки 13, в отверстиях 14 которой установлены оси 15 сменных роликов 16. На рейке 12 установлены направляюнхие пластины 17, взаимодействующие в крайних положениях рейки 12 с роликом 9.
На направляющих пластинах 17 выполнены выступы 18, взаимодействующие с регулировочными винтами 19, установленными в отверстиях 20 упоров 21, установленных на корпусе 1. Направляющие пластины 17 установлены на рейке 12 в отверстиях 22 с возможностью перестановки и фиксации их винтами 23. В корпусе 1 установлены регулировочные винты 24, ограничивающие перемещение стойки 4 в направляющих 2.
Подготовка устройства к работе включает в себя закрепление на планке 13 осей 15 с роликами 16, причем количество их должно быть таковым, чтобы расстояние между осями симметрии крайних роликов 16 было больше требуемой чины возвратно-поступательног О движения в пределах шага рейки 12. На корпусе 1 устанавливаются и закрепляются упоры 21 с обеих сторон рейки 12 в тех местах, г.а.е они будут ограничивать ход рейки 12 с установленным на ней определенным количеством осей 15 с роликами 16, отвечающим вышеуказанному условию. С помощью регу.чи- ровочных винтов 19 хода пластины 17 устанавливают зазор .между выступом 18 направляющей пластины 17 и упором 21, равный разности расстояния между осями симметрии крайних роликов и требуемой величины возвратно-поступательного движения, с обеих сторон хода рейки 12.
Между стойкой 4 и корпусом 1 с помощью регулировочных винтов 24 хода стойки 4
0
5
0
5
0
5
0
5
устанавливают зазор, равный разности величины шага роликовой рейки 12 и величины зазора, установленного между упорами 21 и выступами 18 направляющих пластин 17, с обеих сторон стойки 4.
Устройство работает следующим образом.
При вращении зубчатого колеса 8, катящегося по верхней стороне роликовой рейки 12 против хода часовой стрелки, рейка 12 перемещается вправо со скоростью, равной окружной скорости зубчатого колеса 8 по ее начальной окружности. Когда выступ 18 направляющей пластины 17 войдет в соприкосновение с регулировочным винтом 19 хода пластины 17 с правой стороны хода рейки 12, рейка 12 остановится, стойка 4 начнет отодвигаться влево, а зубчатое ко.чесо 8 будет опускаться по вертикали, так как любому другому его перемещению препятствует направляющая пластина 17, по дуге которой катится ролик 9. За 1/4 оборота зубчатое колесо 8 достигнет среднего положения, его ось совпадает с продолжением оси си.мметрии рейки 12, а стойка 4 сместится влево на величину зазора между регу- ;1ировочным винтом 24 и стойкой 4. В результате дальнейи его опускания зубчатого колеса 8 роликовая рейка 12 меняет направление движения и начинает двигаться роликом 9 влево. При этом зубчатое колесо 8 входит в зацепление с нижней стороны роликовой рейки 12 и перемещает ее влево. При соприкосновении выступа 18 другой направляющей пластины 17 с регулировочным винтом 19 второго упора 21 зубчатое колесо 8 вновь поднимется, что влечет за собой изменение направления движения рейки 12.
При необходимости изменения величины хода возвратно-поступательного движения рейки 12 в пределах одного щага между роликами 16 .достаточно изменить положение регулировочных винтов 19 и 24. Если же изменяется величина хода возвратно-поступательного движения больше шага, то необходи.мо переставить направляющие пластины 17 и изменить количество роликов 16 у роликовой рейки 12.
Формула изобретения
Устройство для преобразования вращательного движения в возвратно-поступательное, содержащее корпус, размещенную в нем стойку с направляющими, ползун, установленный в направляющих, ведущий вал, размещенный в ползуне, зубчатое колесо и ролик, установленные на ведущем валу, привод, щарнирно соединенный с ведущим валом, рейку, направляющие пластины, предназначенные для взаимодействия с роликом в крайних положениях рейки, отличающееся тем, что, с целью расширения
эксплуатационных возможностей, в корпусе выполнены две направляющие, в одной из которых размещена стойка, а в другой -- рейка, устройство снабжено двумя установленными в корпусе парами регулировочных винтов, одна из которых предназначена для
взаимодействия с направляющими пластинами, а вторая - для взаимодействия со стойкой, зубья рейки выполнены в виде съемных роликов, а направляющие пластины установлены на рейке с возможностью перемещения и фиксации.
П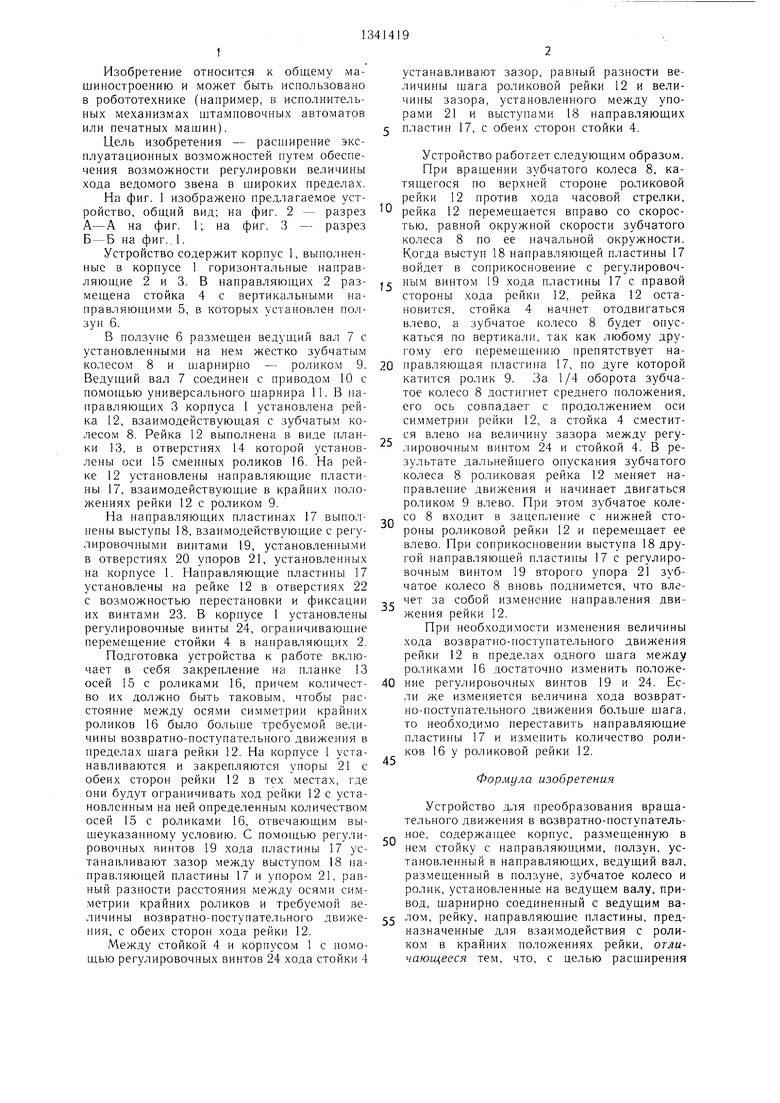
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Устройство для нанесения защитного покрытия на тире спиралей электрических источников света | 1985 |
|
SU1356043A1 |
| Устройство для нанесения защитного покрытия на тире спиралей электрических источников света | 1984 |
|
SU1432634A1 |
| Устройство для обжатия наконечников оплетки кабелей | 1986 |
|
SU1398008A1 |
| ГУСЕНИЧНЫЙ СВАРОЧНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ РОБОТОМ | 2019 |
|
RU2754728C1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Устройство для подачи материала в рабочую зону пресса | 1979 |
|
SU929283A2 |
| Контрольно-обкатной станок для конических и гипоидных зубчатых колес | 1985 |
|
SU1288000A1 |
| Шаговый конвейер | 1987 |
|
SU1475098A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
Изобретение относится к общему машиностроению и может быть использовано в робототехнике, например, в исполнительных механизмах штамповочных автоматов или печатных машин. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения возможности регулировки величины хода ведомого звена в широких пределах. При вращении колеса 8, катящегося по верхней стороне рейки 12 про77 тив часовой стрелки, рейка 12 перемеш,а- ется вправо. Когда выступ 18 направляющей пластины 17 войдет в соприкосновение с регулировочным винтом 19 упора 21 с правой стороны хода рейки 12, рейка 12 остановится, а стойка 4 начнет отодвигаться влево, колесо 8 будет опускаться по вертикали, так как любому другому ее перемещению препятствует направляющая пластина 17, по дуге которой катится ролик. В результате опускания колеса 8 рейка 12 меняет направление движения и начинает двигаться влево. Колесо 8 при этом входит в зацепление с нижней стороной рейки 12. При соприкосновении выступа 18 другой направляющей пластины 17 с регулировочным винтом 19 второго упора 2Г колесо вновь поднимется, что приведет к изменению направления движения рейки 12. Для изменения величины хода рейки 12 в пределах одного шага между роликами 16 достаточно изменить положение винтов 19 и 24. Если же изменяется величина хода рейки 12 больше, чем на шаг рейки 12, необходимо переставить направляющие пластины и изменить количество роликов 16 у рейки 12. 3 ил. S (Л со 4 4 ;& /9 Фиг.1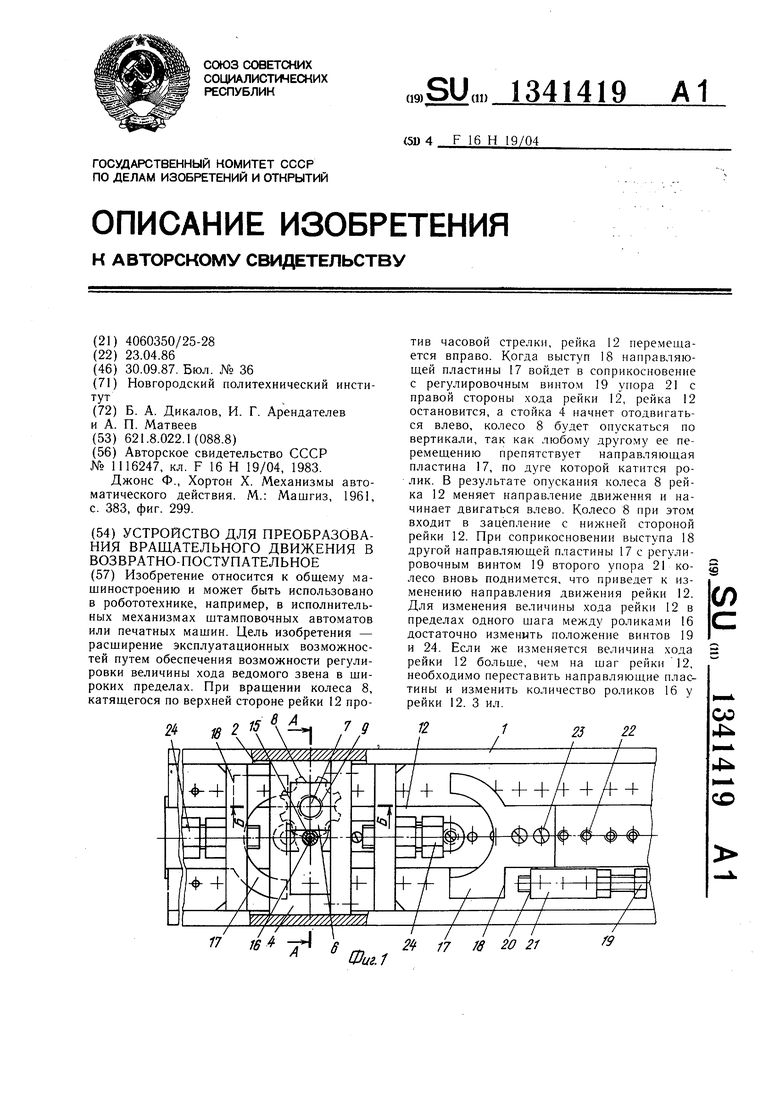
6-6
Составитель С. Андреев
Редактор А. РевинТехред И. ВересКорректор Н Король
Заказ 4420/41Тираж 811Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, у.п. Проектная, 4
Фиг.З
| Устройство для преобразования вращательного движения в возвратно-поступательное с выстоями в крайних положениях | 1983 |
|
SU1116247A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Джонс Ф., Хортон X | |||
| Механизмы автоматического действия | |||
| М.: Машгиз, 1961, с | |||
| Передвижная комнатная печь | 1922 |
|
SU383A1 |
| АВТОМАТ ДЛЯ ПУСКА В ХОД ПОРШНЕВОЙ МАШИНЫ | 1920 |
|
SU299A1 |
