13
Изобретение относится к системам автоматического управления инерционными объектами, подверженными влиянию случайных возмущений с большой амплитудой, и может быть использовано в сельском хозяйстве, в частности в тепличном хозяйстве.
Целью изобретения является повышение качества регулирования за счет увеличения точности и устойчивости.
На чертеже изображена структурная схема предлагаемой системы.
Система содержит объект 1 регулирования, исполнительньй блок 2, второй сумматор 3, усилитель 4, интегратор 5, первый сумматор 6, ключ 7, блок 8 определения модуля, третий сумматор 9, второй блок Ю умножения, первый блок 11 умножения, релейный элемент 12 и блок 13 задания смещения.
Система работает следующим образом.
На выходе второго сумматора 3 определяется отклонение текущего значения регулируемой переменной X от заданного значения Хэ„д(ошибка регулирования 8 Хздд- X). В блоке 8 определение модуля определяется модуль ошибки (|. По ошибке регулируемой величины и ее модулю формируются две составляющие управляющего информационного сигнала, получаемого на выходе первого блока 6 суммирования.
Первая составляющая (квадратичная) формируется умножением в первом блоке 11 умножения ошибки на модуль ошибки и Последуюш 1м усилением полученного информационного сигнала усилителем 4. Первая составляющая выражается формулой
и.
К В-|Е1,
где К - коэффициент усиления усилителя 4.
Вторая составляющая (интегральная) формируется на выходе интегратора 5. На выходе третьего сумматора 9 определяется разность между задаваемой постоянной величиной с/ и модулем ошибки IEI-. - c/ -IEI. Релейный элемент 12 осуществляет анализ знака величины 1J,
Если 1.70, т.е. .ir то ключом 7 на вход интегратора 5 подается формируемый на выходе второго блока 10 умножения информационный сигнал,
16162
равный произведению ошибки регулирования на величину t , Если ч С , т.е. , то ключом 7 на входе интег - ратора 5 сигнал обнуляется, т.е.
) при I 1 d
Z
О
при |g I 7/ 1/.
Управляющий информационный сигнал, определяемый выражением U Kjfz dt+ , с выхода первого сумматора 6 поступает на вход исполнительного
блока 2, который представляет собой пропорциональное или апериодическое звено.
Значения коэффициентов К,, К, а также величина о выбираются в зависимости от свойств объекта 1 регулирования и требований к системе,
В частности, коэффициеи-г усиления К, квадратичной составляющей целесообразно определять из условия
К 1,5 Кп/а, где
К. 1,5 К,
где У-п - коэффициент усиления пропорциональной составляющей, реализующей линейное пропорционально-интегральноерегулирование.
Коэффициент усиления интегральной составляющей целесообразно определять из условия
К
где К - коэффициент усиления интегральной составляющей системы, реализующей пропорционально-интегральное регулирование, при котором соответствующая система устойчива.
При больших значениях ошибки
Ifl 7, 0
величина квадратичной составляющей имеет большие значения (по абсолютной величине), что приводит к быстрому уменьшению величины
50 ошибки. При этом величина интегральной составляющей остается на том уровне, на котором находилась до выхода из области | d . Это уменьшает влияние интегральной составляющей
55 т.е. повьш1ает устойчивость процесса регулирования.
Формула иг; обретения Система автоматического регулирования, содержащая усилитель, интегратор, ключ, релейный элемент, первы блок умножения и первый сумматор, выход которого соединен с входом ис- полнительного блока, второй сумматор первый вход которого соединен с выходом объекта регулирования, второй вход второго сумматора является входом системы, а выход соединен с первым входом первого блока умножения, отличающаяся тем, что, с целью повьшения качества регулирования за счет увеличения точности и устойчивости, дополнительно введены блок задания смещения, второй блок умножения, третий сумматор и блок определения модуля, вход которого объединен с первым входом первого блока умножения, выход котороРедактор Е.Копча
Составитель Б.Кирсанов Техред Л.Сердюкова
4434/51
Тираж 863Подписное
ВНРШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
го через усилитель соединен с первым входом первого сумматора, выход блока определения модуля соединен с вторым входом первого блока умножения и первым входом третьего сумматора, второй вход которого соединен с блоком задания смещения, а выход третьего сумматора соединен с первым
входом второго блока умножения, второй вход которого соединен с выходом второго сумматора, выход третьего сумматора через релейный, элемент соединен с управляющим входом ключа,
информационный вход которого соединен с выходом второго блока умножения, выход ключа через интегратор соединен с вторым входом первого сумматора.
Корректор М.Пожо
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МОЩНОСТИ ЯДЕРНОГО РЕАКТОРА | 2003 |
|
RU2244350C2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Управляемый генератор гармонических сигналов | 1988 |
|
SU1624485A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Регулятор с переменной структурой | 1985 |
|
SU1348770A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403608C1 |
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
Изобретение относится к системам автоматического управления инерционными объектами, подверженными влиянию случайных возмущений большой амплитуды, и может быть использовано в сельском .хозяйстве, в частности в тепличном хозяйстве. Целью изобретения является повьшение качества регулирования за счет увеличения точности и устойчивости. Система содержит объект 1 регулирования, исполнительный блок 2, три сумматора 6,3,9, усилитель 4, интегратор 5, ключ 7, блок 8 определения модуля, два блока умножения 11 и 10 и блок 13 задания смещения. Сущность изобретения заключается во введении нелинейных и логических действий в ПИ-закон регулирования, причем пропорциональная часть закона формируется в нелинейном виде, а интегральная часть включает логическую обработку ошибки регулирования. 1 ил. (Л Oi О5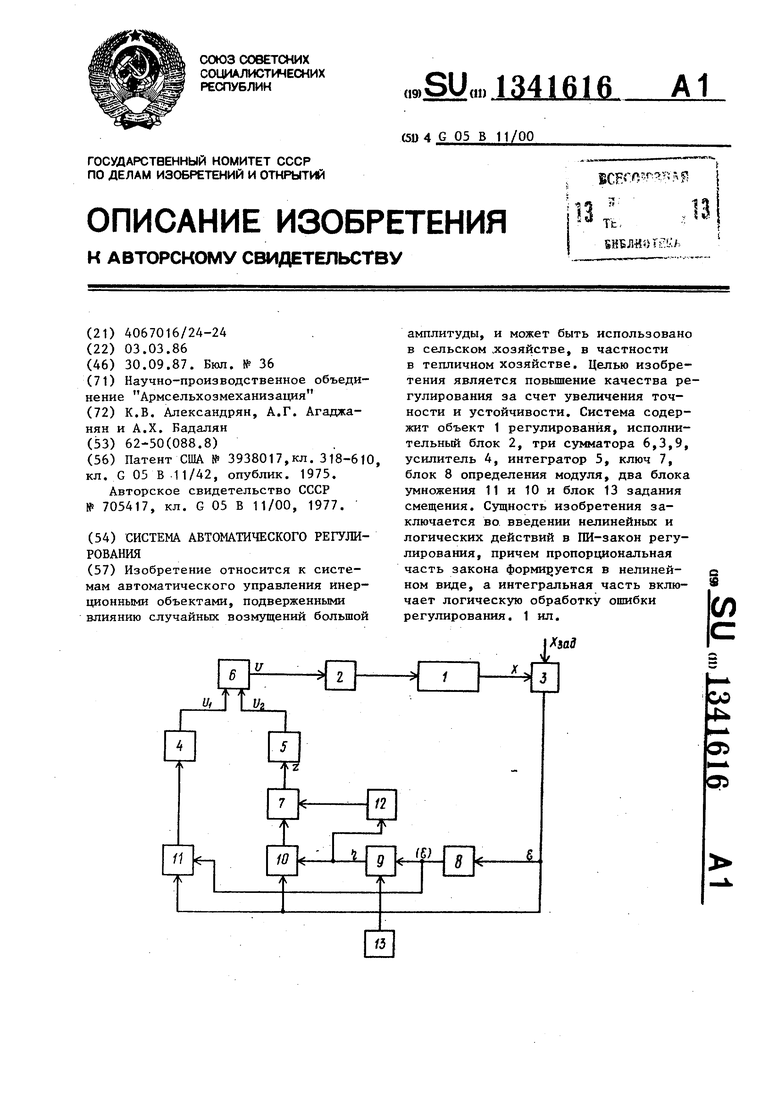
| Патент США № 3938017,кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Система управления | 1977 |
|
SU705417A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
