Изобретение относится к автомати- матическому управлению и регулированию и может быть использовано для управления различными объектами с изменяющимися в ограниченной области параметрами.
Целью изобретения является улучшение качества регулирования.
Сущность изобретения заключается в следующем.
Предлагаемый регулятор, как и прототип, работает в двух режимах: пропорциональном (П-режим) и пропорционально-интегральном (ПИ-режим). В соответствии с этим вырабатываются П- или пи-обобщенные законы регулирования. Обобщенность регулирования заключается в том, что сигналы управления формируются не только из сигнала ошибки между задающим воздействием и регулируемой величиной, но и на основании сигнала о векторе состояния управляемого объекта. Главное отличие предлагаемого регулятора заключается в способе перехода с одного режима на другой. В прототипе при реализации обобщенного пропорционального регулирования выходной сигнал U на объект управления формируется в виде линейных стационарных обратных связей по состояниям объекта управления, т.е. , где - матрица-строка обратных связей, х-п-мерный вектор состояний объекта управ- ра) для обоих законов регулирования.
ления. Если сигнал ошибки становится меньшей заданной определенной величины с (etc), дополнительно к пропорциональному регулятору подключается интeгpaJlьнaя часть, т.е.
t +К edt, где К - постоянньй коэфи в момент перехода с П-закона на пи-закон происходит автоматическая компенсация выходного сигнала регулятора этой разностью. Компенсация 40 осуществляется путем установки соответствующих начальных условий на включаемом интеграторе. В отличие от прототипа, в котором сигнал перехода с П-режима на ПИ-режим определяется по системе; g - входной, задающий сигнал величине ошибки е, в предлагаемом в регулируемой системе; у - выходная, изобретении сигнал перехода определяется по величине квадратичной форГ 7.1 Г Z. l
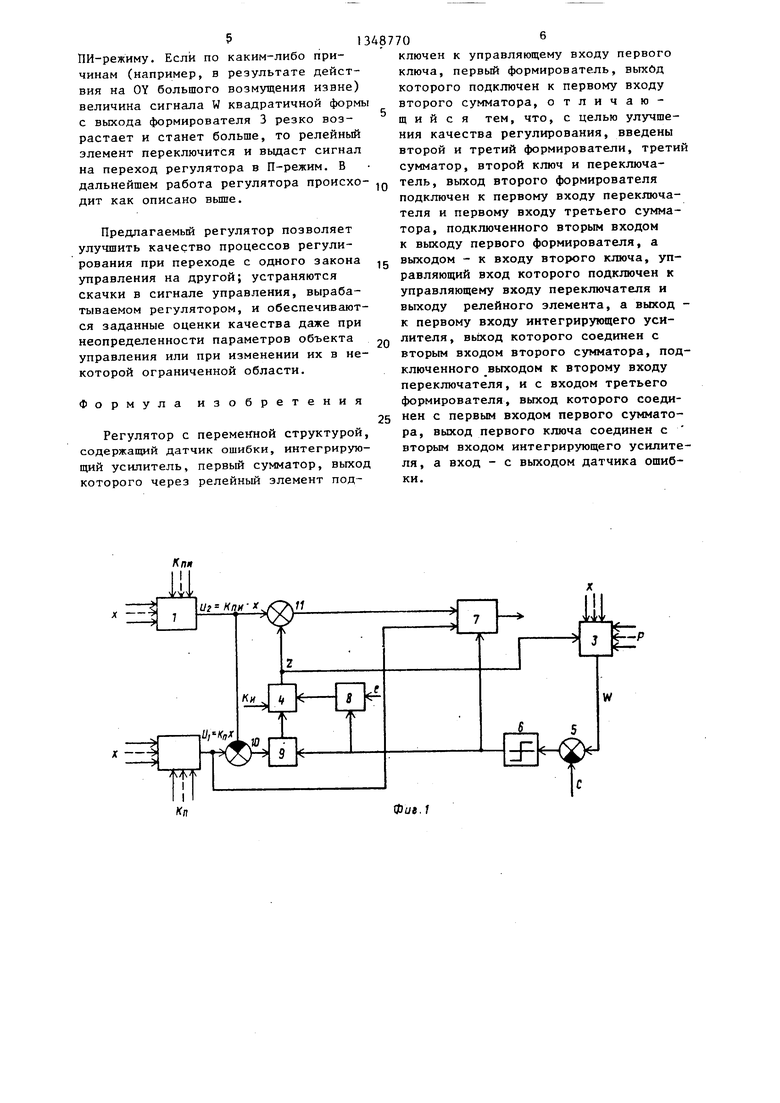
мы W PKj переменных вектора состояния расширенного объекта управле- gQ ния, где Z - выход интегратора. При этом учитывается вся динамика поведения объекта (не только ошибка, но и скорость ее изменения, ускорение и т.д.). Процесс перехода получается
фициент; - ошибка в замкнутой
регулируемая величина замкнутой сие темы; tg - момент включения интегратора; t - текущий момент времени. Коэффициенты матрицы К для режима
пропорционального регулирования рассчитывают исходя из обеспечения некоторого оптимального в принятом смысле качества переходных процессов Подключение в управление интегральной добавки хотя и повышает точность в установившемся режиме, но в то же время ухуди1ает качество переходных процессов. В этом случае при расче планным, без возможных для прототипа перескоков назад, к пропорциональному закону в случае, если скорость изменения ошибки направлена на увеличение ошибки.
те коэффициента К и матрицы обратных связей предлагается ввести в модель объекта управления интегральный элемент, т.е. расширить порядок объекта управления на единицу. Для расширенного объекта управления рассчитывают регулятор с новыми коэффициентами матрицы обратной связи К, и коэффициентом К,, обеспечивающим заданное качество расширенного объекта управления. Таким образом, в предлагаемом регуляторе в режиме пропорционального регулирования реализуется закон и,К„х, в режиме ПИ-регулирования
- закон edt. При пере
ходе с П- на ПИ-закон коэффициенты матрицы Кр скачком меняются на коэф- фициенты К„, . Следовательно, и управление, поступающее с выхода регулятора на объект, меняется скачком, что приводит обычно к нежелательным скачкам и в объекте управления, поэтому предлагается в момент перехо- да поддерживать равенство сигналов и и и, т.е. чтобы последнее значение выходного сигнала регулятора при пропорциональном регулировании равнялось первому значению выходного сигнала регулятора при ПИ-регулировании. Для этого в каждый момент времени вычисляется текущая разность между управ- ЛЯЮ1ЦИМИ сигналами (выходами регулято
планным, без возможных для прототипа перескоков назад, к пропорциональному закону в случае, если скорость изменения ошибки направлена на увеличение ошибки.
Если задать точность, обеспечиваемую регулятором, в виде скалярной величины д , равной значению квадратичной формы W в установившемся режиме, то можно найти область начальных условий на вектор z,x в п+1-мерном пространстве, из которой ПИ-регулятор будет обеспечивать заданное качество процессов. Эта область задается в
виДе выражения
РТ41
xj xj
с, где с
const.
Когда величина W непрерывно вычисгулятора через первый вход переключателя 7 выдается сигнал пропорционального управления U, . Первый ключ 8 закрыт и сигнал на первом входе интегрирующего усилителя 4 равен нулю. В этом случае сигнал на выходе интегрирующего усилителя 4 устанавливается равным сигналу начальных условий, поступающих на его второй вход с открытого в этом режиме второго ключа 9. Сигнал Z,проходящий на выход ключа 9 и далее на выход интегрирующего усилителя 4, равен : ,-U.
ляемой в регуляторе квадратичной фор- 15 Эта разность непрерывно вырабатывает- мы становится меньше с, то регулятор переходит в режим ПИ-регулирования (соответствует области малых отклонений от заданных значений регулируемой величины), при осуществляется 20 П-закон регулирования.
Сущность изобретения поясняется фиг. 1, 2 и 3, где обозначены первый формирователь 1, второй формировася на выходе третьего сумматора 10. Сигнал Z с выхода интегрирующего усилителя 4 поступает на второй вход второго сумматора 11, где складьюает- ся с сигналом Uj, с выхода формирователя I. Выходной сигнал сумматора II в этом случае равен U, так как U
2+Ui i и, .
Таким образом, в любой момент вре- тель 2, третий формирователь 3, интег-25мени при пропорциональном законе на рирующий усилитель 4, первый сумма-третьем входе переключателя 7 присут- тор 5, релейный элемент 6, переключа-ствует сигнал, равный U,. При измене- тель 7, первый ключ 8, второй ключ 9, третий сумматор 10, второй сумматор I1. Остальные обозначения соответ-30ратичной формы на выходе формироватении вектора состояния и сигнала z меняется по величине и сигнал квадствуют-упомянутым выше.
Регулятор работает следующим образом.
Сигналы, соответствующие текущим значениям вектора состояния х объекта управления, поступают на первые п входов первого I, второго 2 и третьего 3 формирователей. На п+1-и вход формирователя 3 поступает также сигнал z с выхода интегрирующего усилителя 4.
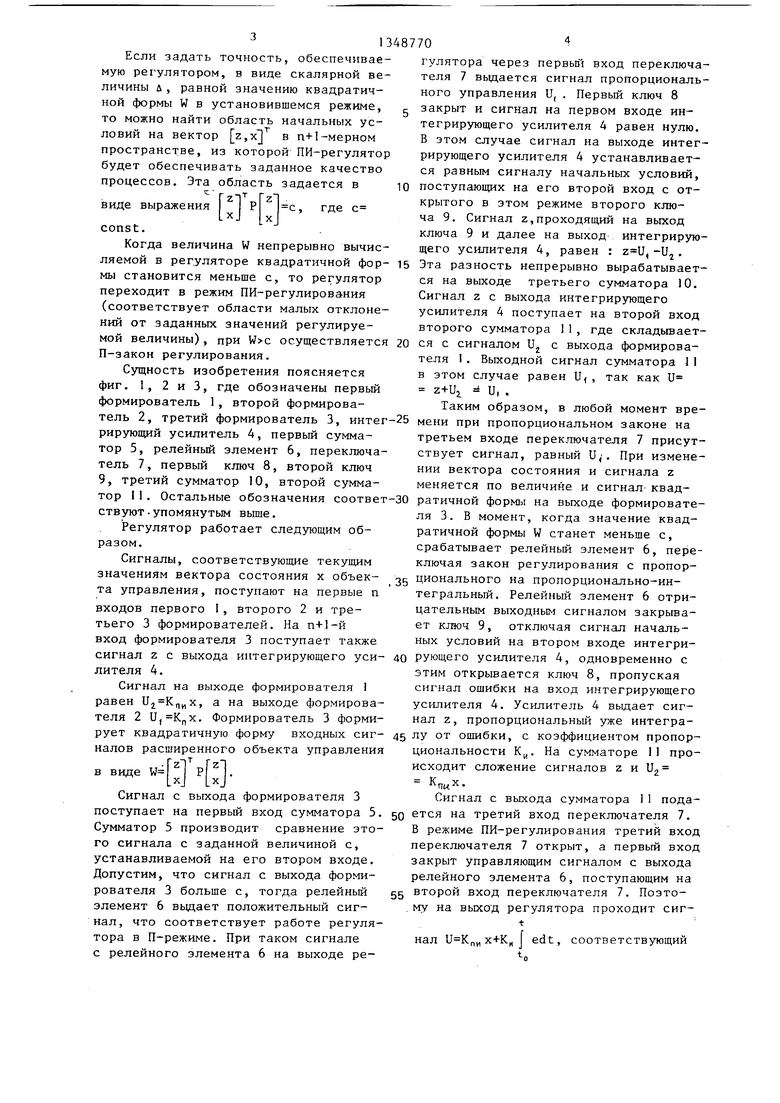
Сигнал на выходе формирователя 1 равен , а на выходе формирователя 2 и,КрХ. Формирователь 3 формиля 3. В момент, когда значение квадратичной формы W станет меньше с, срабатывает релейный элемент 6, переключая закон регулирования с пропор35 ционального на пропорционально-интегральный. Релейный элемент 6 отрицательным выходным сигналом закрьша- ет ключ 9, отключая сигнал начальных условий на втором входе интегри40 рующего усилителя 4, одновременно с этим открьшается ключ 8, пропуская сигнал ошибки на вход интегрирующего усилителя 4. Усилитель 4 вьщает сигнал Z, пропорциональный уже интегра 3 Я50
рует квадратичную форму входных сиг- 45 У ошибки, с коэффициентом пропор- налов расширенного объекта управления циональности К. На сумматоре II происходит сложение сигналов z и U2
Сигнал с выхода сумматора 11 подается на третий вход переключателя 7. В режиме ПИ-регулирования третий вход переключателя 7 открыт, а первый вход закрыт управляющим сигналом с выхода релейного элемента 6, поступающим на gg второй вход переключателя 7. Поэто- . му на выход регулятора проходит сигtнал ,,х+К„ I edt, соответствующий
в виде
L Aj L J
Сигнал с выхода формирователя 3 поступает на первый вход сумматора 5. Сумматор 5 производит сравнение этого сигнала с заданной величиной с, устанавливаемой на его втором входе. Допустим, что сигнал с выхода формирователя 3 больше с, тогда релейньй элемент 6 выдает положительный сигнал, что соответствует работе регулятора в П-режиме. При таком сигнале с релейного элемента 6 на выходе ре
гулятора через первый вход переключателя 7 выдается сигнал пропорционального управления U, . Первый ключ 8 закрыт и сигнал на первом входе интегрирующего усилителя 4 равен нулю. В этом случае сигнал на выходе интегрирующего усилителя 4 устанавливается равным сигналу начальных условий, поступающих на его второй вход с открытого в этом режиме второго ключа 9. Сигнал Z,проходящий на выход ключа 9 и далее на выход интегрирующего усилителя 4, равен : ,-U.
Эта разность непрерывно вырабатывает-
Таким образом, в любой момент вре мени при пропорциональном законе на третьем входе переключателя 7 присут ствует сигнал, равный U,. При измене ратичной формы на выходе формировате
нии вектора состояния и сигнала z меняется по величине и сигнал квадля 3. В момент, когда значение квадратичной формы W станет меньше с, срабатывает релейный элемент 6, переключая закон регулирования с пропор35 ционального на пропорционально-интегральный. Релейный элемент 6 отрицательным выходным сигналом закрьша- ет ключ 9, отключая сигнал начальных условий на втором входе интегри40 рующего усилителя 4, одновременно с этим открьшается ключ 8, пропуская сигнал ошибки на вход интегрирующего усилителя 4. Усилитель 4 вьщает сигнал Z, пропорциональный уже интегра50
gg
пи-режиму. Если по каким-либо причинам (например, в результате действия на OY большого возмущения извне) величина сигнала W квадратичной формы с выхода формирователя 3 резко возрастает и станет больше, то релейный элемент переключится и выдаст сигнал на переход регулятора в П-режим. В дальнейшем работа регулятора происходит как описано вьшге.
Предлагаемый регулятор позволяет улучшить качество процессов регулирования при переходе с одного закона управления на другой; устраняются скачки в сигнале управления, вырабатываемом регулятором, и обеспечиваются заданные оценки качества даже при неопределенности параметров объекта управления или при изменении их в некоторой ограниченной области.
Формула изобретения
Регулятор с переменной структурой, содержащий датчик ошибки, интегрирующий усилитель, первый сумматор, выход которого через релейный элемент под
3487706
ключен к управляющему входу первого ключа, первый формирователь, выхбд которого подключен к первому входу второго сумматора, отличающийся тем, что, с целью улучшения качества регулирования, введены второй и третий формирователи, третий сумматор, второй ключ и переключа Q тель, выход второго формирователя подключен к первому входу переключателя и первому входу третьего сумматора, подключенного вторым входом к выходу первого формирователя, а выходом - к входу второго ключа, управляющий вход которого подключен к управляющему входу переключателя и выходу релейного элемента, а выход - к первому входу интегрирующего усилителя, вьЬсод которого соединен с вторым входом второго сумматора, подключенного выходом к второму входу переключателя, и с входом третьего формирователя, выход которого соеди25 нен с первым входом первого сумматора, выход первого ключа соединен с вторым входом интегрирующего усилителя , а вход - с выходом датчика ошибки.
15
20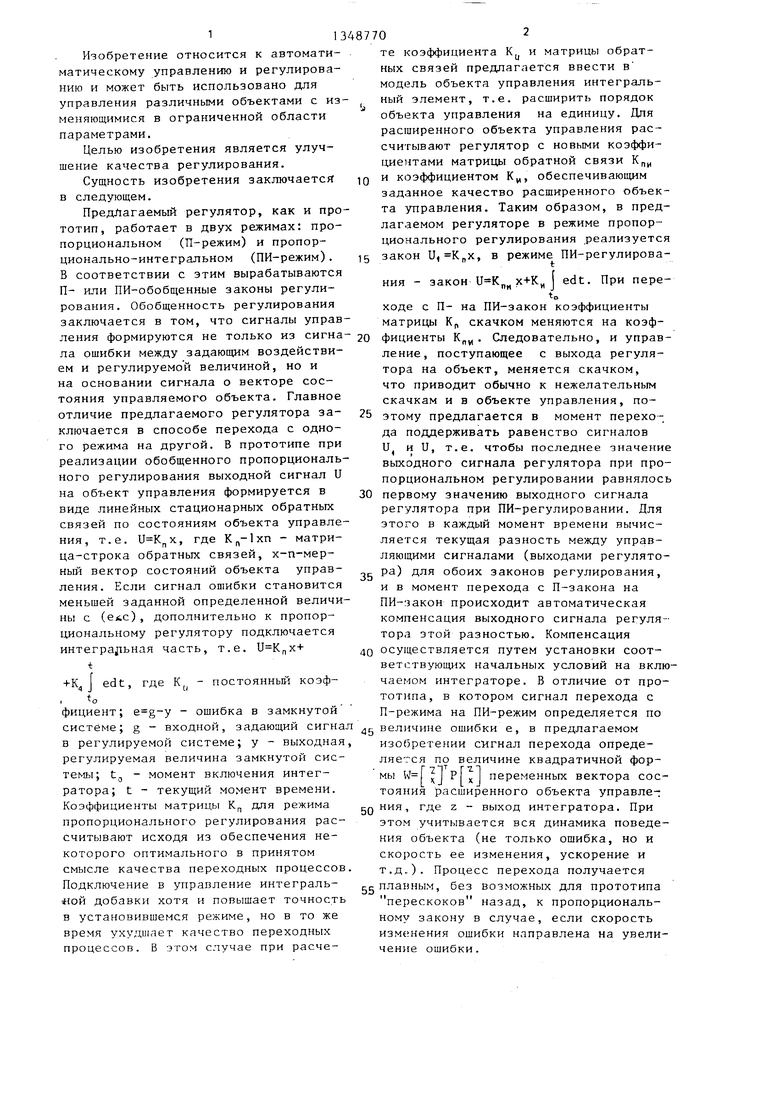
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1979 |
|
SU960727A2 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Система автоматического регулирования | 1986 |
|
SU1341616A1 |
| Способ автоматического регулирования координат электропривода и устройство для его осуществления | 2017 |
|
RU2660183C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Адаптивное устройство приема широкополосного сигнала | 1990 |
|
SU1781826A1 |
Изобретение относится к автоматическому управлению и регулированию и Мбжет быть использовано для управления различными объектами с неопределенными или изменяющимися в некоторой области параметрами. Целью изобретения является повышение качества регулирования. Переменная структура регулятора позволяет реализовать два обобщенньк закона управления: пропорциональный (П) пропорционально- интегральный (ПИ). Переход с одного . закона на другой осуществляется по величине квадратичной формы переменных состояния расширенного (за счет включения интегратора) объекта управления. В предлагаемом регуляторе осуществляется компенсация скачков в управлении, возникающих при переходе с П- на пи-закон управления. Компенсация производится путем автоматической установки соответствующих начальных условий на интеграторе. Регулятор обеспечивает в замкнутой системе заданные оценки качества, в acтнocти время переходных процессов и перерегулирование. 3 ил. (Л 00 4 00 
К ПК
111
X
X -
е-Р
W
Фие. f
фиг. 2
Составитель В. Кузин Редактор А. Маковская Техред Л.Сердюкова
Заказ 5186/45 Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фие. 3
Корректор Г. Решетник
| Регулятор с переменной структурой | 1979 |
|
SU954929A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пузырев В.А | |||
| Управление технологическими процессами производства мик- роэлектронных приборов | |||
| М.: Радио и связь | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
