1134
Изобретение относится к автоматике и может быть использовано в системах программного управления электроприводом.
Цель изобретения - повьшение точности регулирования-положения.
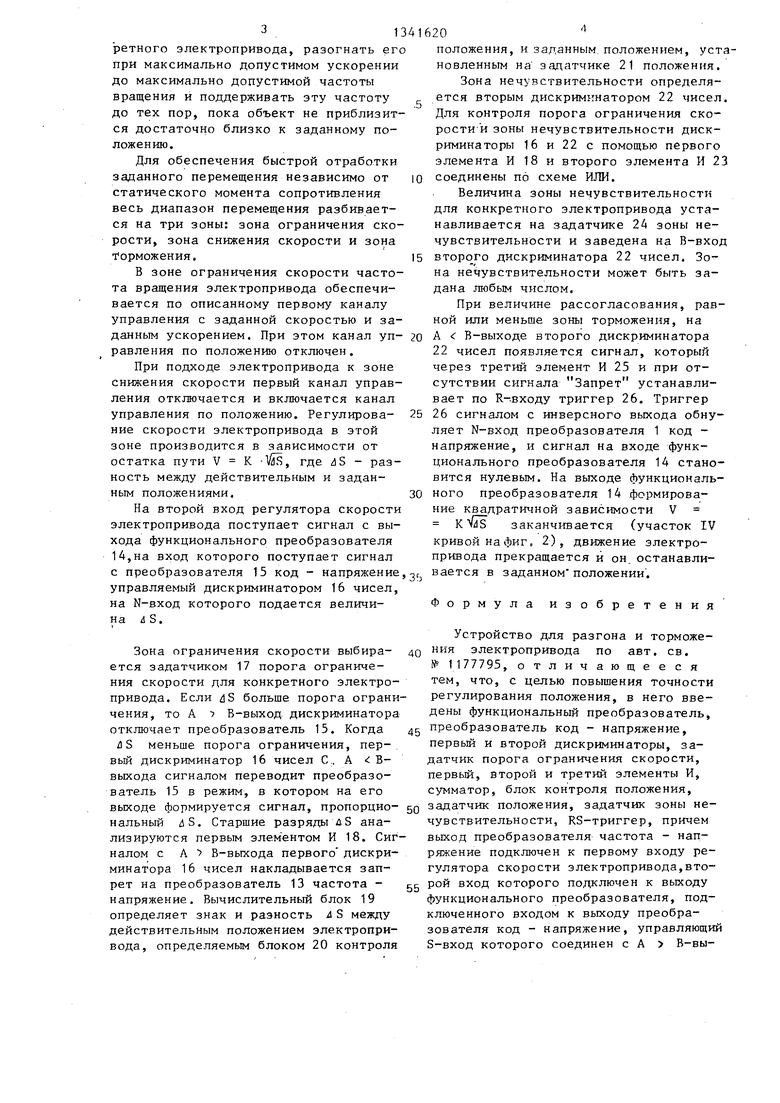
На фиг. 1 изображена функциональная схема предлагаемого устройства, на фиг. 2 - график зависимости пути. V от времени, t.
Устройство (фиг. 1) содержит генератор 1 опорной частоты, второй 2, первый 3 и третий 4 управляемые делители частоты, ключ 5, счётчик 6 импульсов, первый 7 и второй 8 элементы И, реверсивный счетчик 9 импульсов, элемент ИЛИ 10, блок 11 совпадения, элемент НЕ 12, преобразователь 13 частота - напряжение, функциональный преобразователь 14, преобразователь 15 код - напряжение, первый дискриминатор 16, задатчик 17 порога ограничения скорости, первый элемент И 18, сумматор 19 блока 20 контроля положения, задатчик 21 положения, второй дискриминатор 22, второй элемент И 23, задатчик 24 зоны нечувствительности, третий элемент И 25, RS-триг- гер 26 и регулятор скорости электропривода 27.
Устройство для разгона и торможения электропривода работает следующим образом.
С выхода генератора 1 на тактовые входы управляемых делителей 2-4 частоты поступают импульсы с частотой f. На входы управления делителя 2 частоты подаетсй код и ускорения при разгоне и торможения.
По шине Пуск производится запуск устройства. При этом ключ 5 подготавливается к приему импульсов с выхода первого управляемого делителя 3 частоты на счетный вход счетчика 6 импульсов .
Частота импульсов f на выходе делителя 2 частоты выражается следующим образом:
f -
п
где п - код, соответствующий заданному ускорению при разгоне и торможении, поступаюптий на входы делителя 2 частоты.
Импульсы с выхода делителя 2 с частотой f,, соответствующей заданному ускорению, поступают на входы
6202
элементов И 7 и 8. ПРи разгоне импульсы с частотой f, через э.пемент И 7 поступают на суммирующий вход реверсивного счетчика 9. В результате код на выходе счетчика 9 увеличивается от О до N по линейному закону,Код . с выходов счетчика 9 поступает на входы управляемого делителя 3 частоQ ты, элемента ИЛИ 10 и блока 11 совпадения. На входы блока 11 подается код Задание скорости. На вход инвертора 12 подается сигнал разгона и торможения
5 Частота f на выходе делителя 3 частоты изменяется обратно пропорционально числу N, т.е. F. .
В счетчике 6 формируется код К - 1, пропорциональный ч астоте F , т.е.
0 N K-F, К. fj,/N. Код № 1 поступает на управляющие входы делителя 4 частоты, изменяя его выходную частоту по закону: F KN.
В преобразователе 13 частота пре5 образуется в напряжение, которое подается в регулятор скорости электропривода. По этому сигналу электропривод разгоняется по заданному закону с постоянным ускорением (учасQ ток I кривой на фиг. 2),
При достижении заданной скорости блок 11 совпадения запрещает прохождение импульсов, через элемент И 7 на суммирующий вход счетчика 9. Код на выходах реверсивного счетчика 9 остается постоянным, следовательно, частота импульсов остается постоянной (участок II кривой на фиг. 2).
При поступлении на вход устройсто ва сигнала Торможение и наличии
разрешающего сигнала с выхода элемента ИЛИ 10, свидете.льствующего о ненулевой скорости электропривода, импульсы с частотой f через элемент g И 8 поступают на вычитающий вход реверсивного счетчика 9., Код этого счетчика уменьшается, уменьшая пропорционально част оту F электропривода торможения (участок III кривой на фиг. 2), Частота F с выхода делителя 4 частоты поступает через преобразователь 13 частота - напряженке на регулятор скорости электропривода. Электропривод тормозится.
Задавая различные коды на вход управляемого делителя 2 частоты, можно изменять ускорения iipH разгоне к торможении, т.е. изменять крутизну участков 1и IITкривой (фиг. 2) для конк5
50
55
31
ретного электропривода, разогнать ег при максимально допустимом ускорении до максимально допустимой частоты вращения и поддерживать эту частоту до тех пор, пока объект не приблизится достаточно близко к заданному положению.
Для обеспечения быстрой отработки заданного перемещения независимо от статического момента сопротивления весь диапазон перемещения разбивается на три зоны: зона ограничения скорости, зона снижения скорости и зона торможения.
В зоне ограничения скорости частота вращения электропривода обеспечивается по описанному первому каналу управления с заданной скоростью и заданным ускорением. При этом канал уп- равления по положению отключен.
При подходе электропривода к зоне снижения скорости первый канал управления отключается и включается канал управления по положению, Регулирова- ние скорости электропривода в этой зоне производится в зависимости от остатка пути V К -lUS, где jdS - разность между действительным и заданным положениями.
На второй вход регулятора скорости электропривода поступает сигнал с выхода функционального преобразователя 14,на вход которого поступает сигнал с преобразователя 15 код - напряжение управляемый дискриминатором 16 чисел, на N-вход которого подается величина Л5,
Зона ограничения скорости выбира- ется задатчиком 17 порога ограничения скорости для конкретного электропривода. Если uS больше порога ограничения, то А 7 В-выход дискриминатора отключает преобразователь 15. Когда
uS меньше порога ограничения, первый дискриминатор 16 чисел С., А «г В- выхода сигналом переводит преобразователь 15 в режим, в котором на его выходе формируется сигнал, пропорцио- нальный 4S. Старшие разряды д5 анализируются первым элем ентом И 18. Сигналом с А В-выхода первого дискриминатора 16 чисел накладывается запрет на преобразователь 13 частота - напряжение. Вычислительный блок 19 определяет знак и разность иS между действительным положением электропривода, определяемым блоком 20 контроля
620
положения, и заданным, положением, установленным на задатчике 21 положения. Зона нечувствительности определяется вторым дискриминатором 22 чисел. Для контроля порога ограничения скорости и зоны нечувствительности дискриминаторы 16 и 22 с помощью первого элемента И 18 и второго элемента И 23 соединены по схеме ИЛИ.
Величина зоны нечувствительности для конкретного электропривода устанавливается на задатчике 24 зоны нечувствительности и заведена на В-вход второго дискриминатора 22 чисел. Зона нечувствительности может быть задана любым числом.
При величине рассогласования, равной или меньше зоны торможения, на А В-выходе второго дискриминатора 22 чисел появляется сигнал, который через третий элемент И 25 и при отсутствии сигнала Запрет устанавливает по R-.входу триггер 26. Триггер 26 сигналом с инверсного выхода обнуляет N-вход преобразователя 1 код - напряжение, и сигнал на входе функционального преобразователя 14 становится нулевым. На выходе функционального преобразователя 14 формирование квадратичной зависимости V
К VJs заканчивается (участок IV кривой на фиг, 2), движение электропривода прекращается и он. останавливается в заданном положении.
Формула изобретения
Устройство для разгона и торможения электропривода по авт. св. № 1177795, отличающееся тем, что, с целью повышения точности регулирования положения, в него введены функциональный преобразователь, преобразователь код - напряжение, первый и второй дискриминаторы, за- датчик порога ограничения скорости, первый, второй и третий элементы И, сумматор, блок контроля положения, задатчик положения, задатчик зоны нечувствительности, RS-триггер, причем выход преобразователя частота - напряжение подключен к первому входу регулятора скорости электропривода,второй вход которого подключен к выходу функционального преобразователя, подключенного входом к выходу преобразователя код - напряжение, управляющий S-вход которого соединен с А В-выходом первого дискриминатора, соединенного В-входами с выходами задатчи- ка порога ограничения скорости, а А- входами - с первыми восемью выходами сумматора и с выходом первого элемен та И, подключенного входами к шести старшим разрядам сумматора, знаковый выход которого соединен с V-входом преобразователя код - напряжение информационные N-входы которого соединены с первыми восемью выводами сумматора, а R-вход подключен к инверсному выходу RS-триггера, S-вход которого является входом запуска устройства, а S-вход соединен с выходом третьего элемента И, один вход которого является входом запрета устройРедактор Е.Копча
Составитель И.Швец Техред Л.Сердюкова
Заказ 4434/51Тираж 863Подписное
ВНИИПИ Государственного комитета СССР , по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
ства, а другой вход подключен к А В- входу второго дискриминатора, В-входы которого соединены с выходами задат- чика зоны-нечувствительности, А-входы подключены к первым восьми выходам сумматора,а управляющие входы Е1 и Е2 соединены с выходами Е1 и Е2 первого дискриминатора соответственно,
восьмой выход сумматора подключен к одному входу второго элемента И, другой вход которого соединен с выходом первого элемента И, а выход подключен к одному А-входу второго дискриминатора, А-входы сумматора соединены с выходами блока контроля положения, а В-входы - с выходами задат- чика положения.
Фм.2
Корректор Н.Король
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления механизмами установки валков обжимной клети винтовой прокатки | 1991 |
|
SU1794516A1 |
| Система программного управления механизмами установки валков обжимной клети винтовой прокатки | 1987 |
|
SU1537340A1 |
| Стабилизированный электропривод постоянного тока | 1986 |
|
SU1359879A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Цифровая система регулирования скорости центробежного аппарата | 1983 |
|
SU1176302A1 |
| Устройство для разгона и торможения электропривода | 1989 |
|
SU1725183A1 |
| Преобразователь кода в угловое положение вала | 1983 |
|
SU1088048A1 |

Изобретение относится к автоматике и предназначено для работы в системах программного управления электроприводом. Цель изобретения состоит в повышении точности регулирования положения и достигается тем. что в известное устройство по а.с. № 1177795 введены функциональный преобразователь 14, преобразователь 15 код - напряжение, первый дискриминатор 16, задатчик 17 порога ограничения скорости, первый элемент И 18, сумматор 19, блок 20 контроля положения, задатчик 21 положения, второй дискриминатор 22, второй элемент И 23, задатчик 24 зоны нечувствительности, третий элемент И 25, RS-триг- гер 26, т.е. второй канал контроля положения электропривода. Точность по позиционированию обеспечивается использованием каналов регулирования частоты вращения электропривода, а затем канала регулирования положения. 2 ил. с (Л Ракон- торношемие со 4 О5 ьо INJ Запрет
| Устройство для разгона и торможения электропривода | 1984 |
|
SU1177795A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
