Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам регулирования направления движения машины для внутрипочвенного внесения удобрений.
Цель изобретения - повышение качества внесения удобрений и ироизводительности машины путем повышения устойчивости прямолинейного движения.
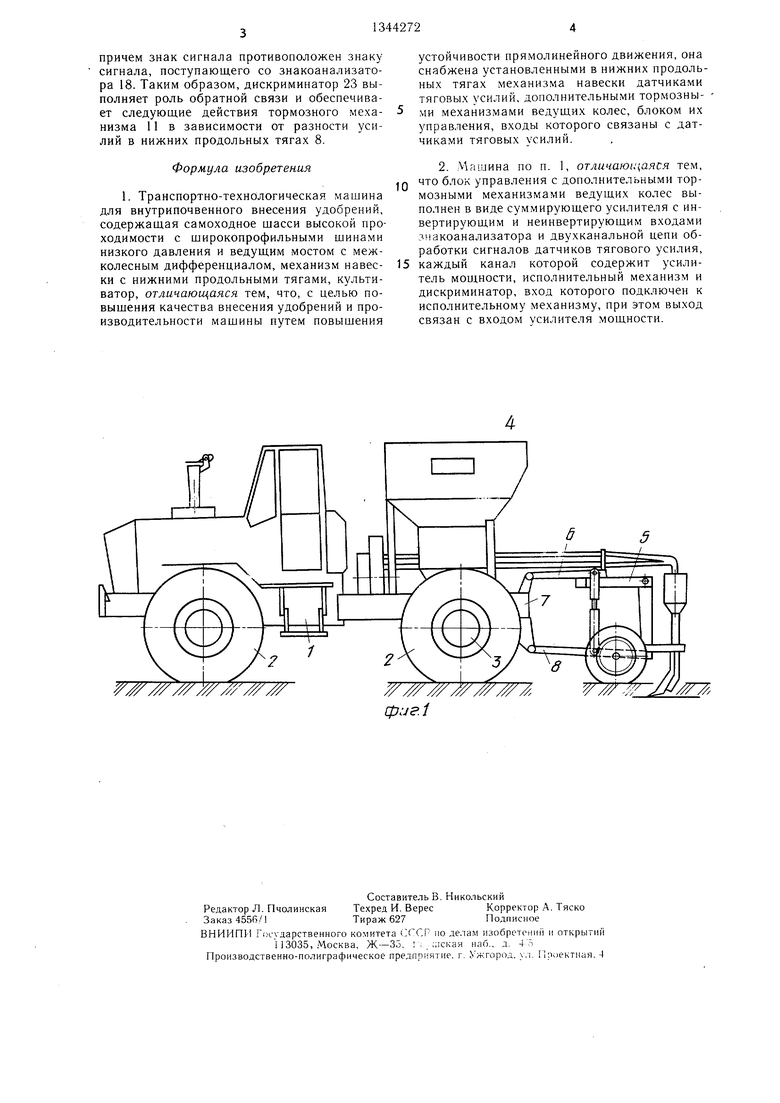
На фиг. 1 изображена транспортно-те.х- нологическая машина для внутрипочвенного внесения удобрений, вид сбоку; на фиг. 2 блок-схема системы регулирования транс- портно-технологической машины для внутри- почвенного внесения удобрений.
Транспортно-технологическая машина для внутрипочвенного внесения удобрений содержит самоходное шасси 1 высокой проход : мости с ш,ирокопрофильными шинами 2 низкого давления и ведущий мост 3 с межколесным дифференциалом (не показан). На шасси 1 установлено технологическое оборудование, включаюш,ее бункер 4 и культиватор 5, который посредством механизма 6 навески соединяется с рамой 7 шасси 1. На нижних продольных тягах 8 механизма 6 навески установлены датчики 9 и 10 тяговых усилий. Колеса ведущего моста 3 снабжены дополнительными тормозными механизмами . 11 и 12. Для управления тормозными механизмами 11 и 12 на машине установлен блок 13 управления, входы которого через усилители 14 и 15 подключены к дат;- чикам 9 и 10 тяговых усилий, установленным в нижних продольных тягах 8 механизма 6 навески. Блок 13 упр,-.г,л-:-чия выполнен в виде суммирующего усилителя 16 с инвер- тируюншм и неирвертирующим входами, знакоанализатора 17 и двухкана.льной цепи 18 обработки сигналов датчиков 9 и 10 тяговы:-. усилий. Каналы цепи 18 состоят из последовательно соединенных усилителей 19 и 20 мощности, исполнительных механизмов 2 и 22 дискриминаторов 23 и 24, подключенных к исполните,1ьным механизма. 21 и 22, а выходами связанных с входами усилителей 19 и 20 мощности.
Транспортно-технологическая машина для внутрипочвенного внесения удобрений работает следуюи;им образом.
При выполнении технологического процесса удобрения из бункера 4 по специаль- тукопроводам подаются к рабочим органам культиватора 5,
Рабочие органы культиватора 5 заделывают удобрения на определенную глубину, зависящую от вида растений, типа удобрений и т. д.
При двжении транспортно-технологичес кой машины для внутриночвенного внесения удобрений в нижних продольных тягах :S механизма 6 навески возникают ;-си- ия, обеспечивающие преодоление со. . ле1шя почвы рабочим органам кулыива-.ч.) ра 5. На выходах датчиков 9 и 10 появля1С; ся сигналы, пропорциональные тяговым уси
0
5
0
5
0
5
0
5
0
ЛИЯМ. Эти сигналы в виде напряжений, значения которых пропорциональны тяговым усилиям в нижних продольных тягах 8 механизма 6 навески, через усилители 14 и 15 подаются на соответствующие входы суммирующего усилителя 16. При этом, если на его входах сигналы усилителей 14 и 15 равны по абсолютной величине, на выходе суммирующего усилителя 16 сигнал равен нулю. Напряжение на его выходе будет только в том случае, когда разность усилий в нижних продольных тягах 8 достигнет значения, боль щего, чем заданный уровень. При этом, если усилие в левой тяге 8 больше усилия в правой, на выходе сумматора напряжение Усум 0, если усилие в правой тяге 8 больше, чем в левой, то Ucyv. 0. Если усилия в тягах 8 равны или их разница меньше заданного значения, то .
Разные усилия в продольных нижних тягах механизма 6 навески возникают при работе машины в результате неоднородности плотности почвы по ширине захвата культиватора 5. Чем больше ширина захвата культиватора 5, тем выше может быть разница усилий. Разность усилий создает разворачивающий момент, который нарушает прямолинейность движения машины.
При превышении разности усилий в нижних продольных тягах 8 заданного значения (допустим, что усилие в правой нижней ;я1е болыне, чем в левой), на выходе сумматс ;;- 16 появится сигнал . Этот сигнал .: ступит на вход знакоапализатора 17, который пропускает отрицательный сигнал на усилитель 19 мощности, а положительный - на усилитель 20 мощност) В данном случае на вход усилителя 19 м;}:цности поступит аналоговый сигнал, пропорциональный разности тяговых усилий в 11к/К 1и продольных тягах 8 механ1-1зма 6 навески. Усиленный сигнал запитывает исполнительный механизм 21, который приводит в действие до- по.чнителыгый тормознгй чеханюм И, установленный в левом : снортно-технологичес)- тате крутяший момен полуоси левого колеса увеличивается (сумма момента сопротивления качению и тяги колеса плюс тормозной момент). Одновременно возрастает крутящий момент на правом колесе, что вызывает повышение его силы тяги. Крутящий момент, возникающий от разности касательных сил на колесах, способствует преодолению разворачивающего .момента от разности тяговых усилий в продольных нижних тягах 8 механизма навески и стабилизирует прямолинейное движен;1е .-ii регата.
Дискриминатор 23, : - c,,j. которого связан
с исполнительным механизмом 21, преобра.- перемещение последнего в аналоговый
i ь. 1ческий сигнал нротивоположной по;. - ги, пропорциональный Г1ереме1цению
: .;.1-ительного механизма 21. Этот си|-нал
:Л на вход усилителя 19 мощности.
,,ем колесе тран. 1ИНЫ. В резуль. ,|:фференциальной
причем знак сигнала противоположен знаку сигнала, поступающего со знакоанализато- ра 18. Таким образом, дискриминатор 23 выполняет роль обратной связи и обеспечивает следующие действия тормозного механизма 11 в зависимости от разности усилий в нижних продольных тягах 8.
Формула изобретения
1. Транспортно-технологическая машина для внутрипочвенного внесения удобрений, содержащая самоходное щасси высокой проходимости с широкопрофильными шинами низкого давления и ведущим мостом с межколесным дифференциалом, механизм навески с нижними продольными тягами, культиватор, отличающаяся тем, что, с целью повышения качества внесения удобрений и производительности машины путем повышения
устойчивости прямолинейного движения, она снабжена установленными в нижних продольных тягах механизма навески датчиками тяговых усилий, дополнительными тормозны- ми механизмами ведущих колес, блоком их управления, входы которого связаны с датчиками тяговых усилий.
2. Машина по п. 1, отличаюи(аяся тем, что блок управления с дополнительными тормозными механизмами ведущих колес выполнен в виде суммирующего усилителя с инвертирующим и неинвертирующим входами знакоанализатора и двухканальной цепи обработки сигналов датчиков тягового усилия, каждый канал которой содержит усилитель мощности, исполнительный механизм и дискриминатор, вход которого подключен к исполнительному механизму, при этом выход связан с входом усилителя мощности.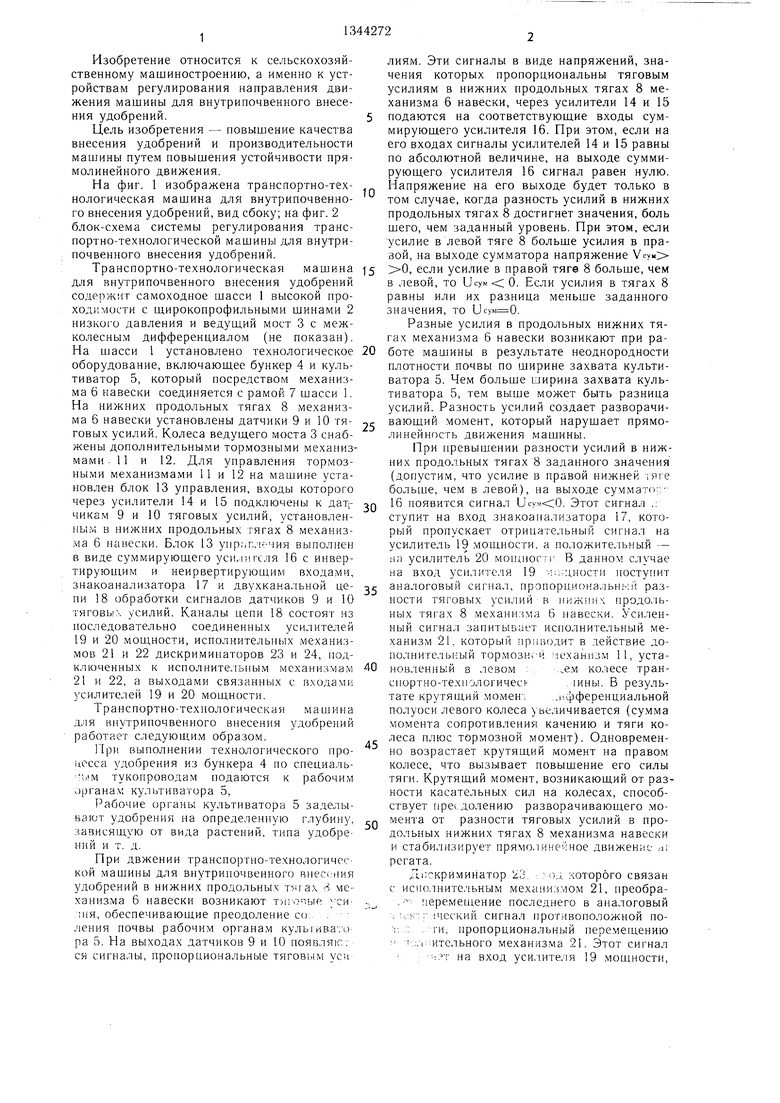
| название | год | авторы | номер документа |
|---|---|---|---|
| Сельскохозяйственный агрегат | 1986 |
|
SU1429960A1 |
| Сельскохозяйственный агрегат | 1986 |
|
SU1461381A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| Сельскохозяйственный агрегат | 1986 |
|
SU1324598A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГЛУБИНОЙ ОБРАБОТКИ ПОЧВЫ ФРОНТАЛЬНЫМ РОТАЦИОННЫМ ВНУТРИПОЧВЕННЫМ РЫХЛИТЕЛЕМ | 2009 |
|
RU2418399C2 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам регулирования направления движения машины для внутрипочвенного внесения удобрений. Цель изобретения - повышение качества внесения удобрений и производительности машины. Машина снабжена датчиками 9 и 10 тяговых усилий, дополнительными тормозными механизмами 11(12) ведуш,их колес и блоком 13 управления. Датчики тяговых усилий установлены в нижних продольных тягах механизма навески. Блок 13 управления выполнен в виде усилителя 16 с инвертирующим и неинвертирующим входами, знакоанализатора 17 и двухканальной цепи 18 обработки сигналов датчиков тяговых усилий. Каждый канал цепи содержит усилитель 19(20) мощности, исполнительный механизм 21(22) и дискриминатор 23(24). Вход дискриминатора подключен к исполнительному механизму, а выход связан с входом усилителя мощности. При превышении разности усилий в нижних продольных тягах заданного значения сигнал подается на исполнительный механизм 21, который приводит в действие тормозной механизм 11(12). В результате этого прямолинейное движение стабилизируется. 1 3. п. ф-лы. 2 ил. и (Л со 4 4 КЭ ISD
жжжжж:
фиг. i
.г х/ж:
| Техническое описание самоходной машины для внутрипочвенного внесения удобрений, АВМ--800.00.000 ТО. |
